







所需材料:
- Euroc数据集主页:https://projects.asl.ethz.ch/datasets/doku.php?id=kmavvisualinertialdatasets
- evo评估工具代码:https://github.com/MichaelGrupp/evo
- 向msckf-vio中添加保存位姿的代码,可参考https://blog.csdn.net/xiaoxiaoyikesu/article/details/106308311
不过需要特别注意,
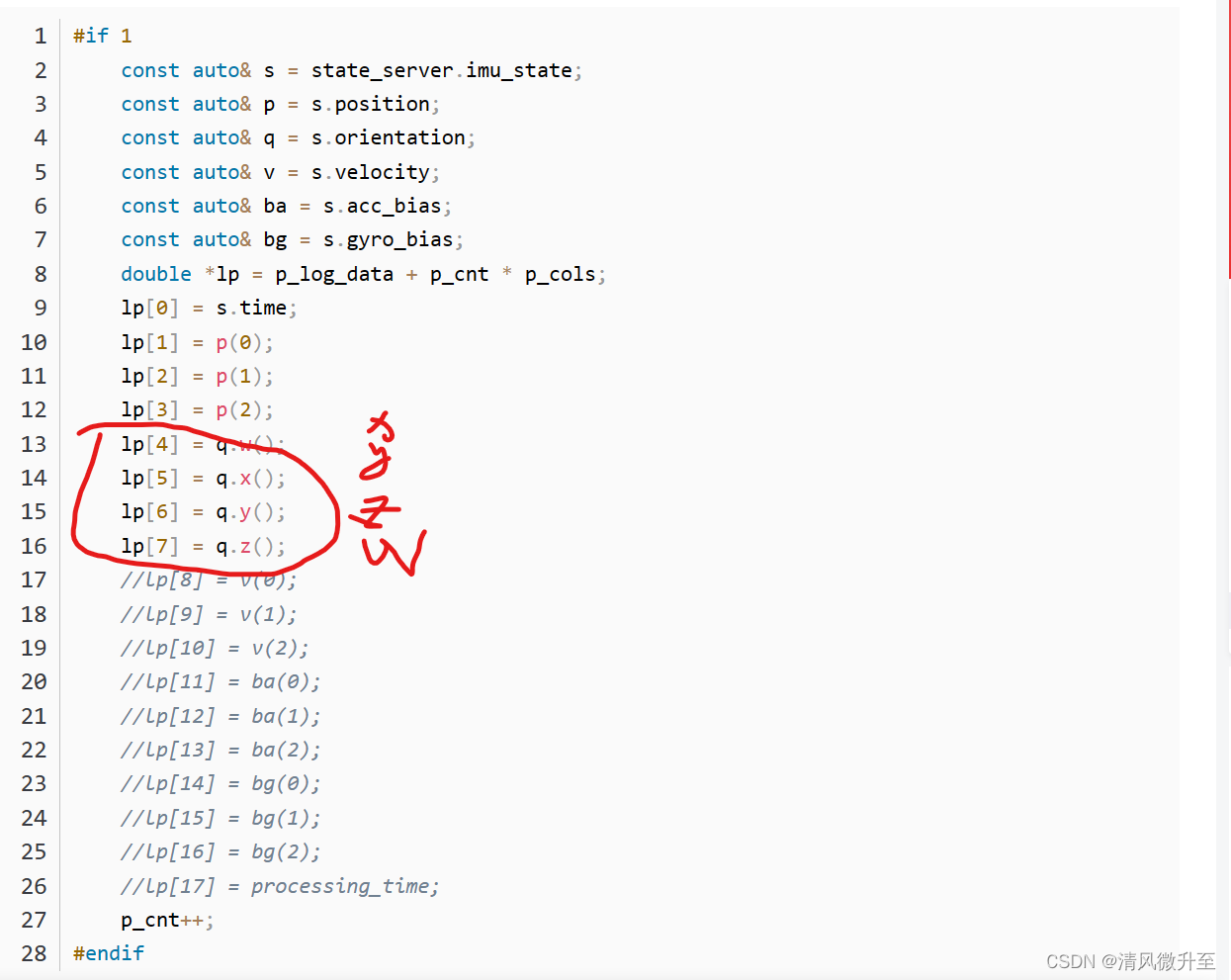
这里的lp[4]~[7]所对应的q的顺序应为x,y,z,w,而不是w,x,y,z,该顺序是与tum数据格式一致,才能用evo_ape tum xxxxx。如果不改这个地方,evo_ape 进行评估时,角度会差很多,乱七八糟的。下图为evo github代码wiki对tum格式的介绍,当然也可以参考tum数据集的主页。
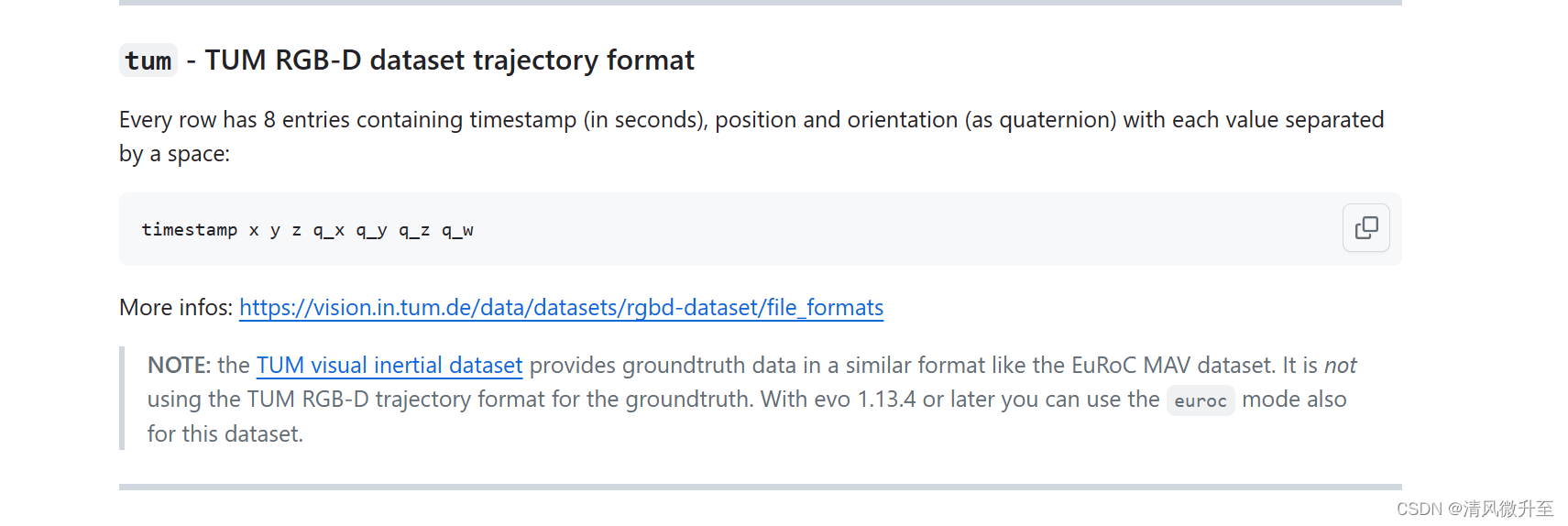
上图来源为:https://github.com/MichaelGrupp/evo/wiki/Formats
但我跑完了V101~103,以及MH04后,发现其RMSE结果与论文中所列的不同,基本是论文中的一半,令人非常费解。有没有解决过这个问题的大佬给指点下。。。
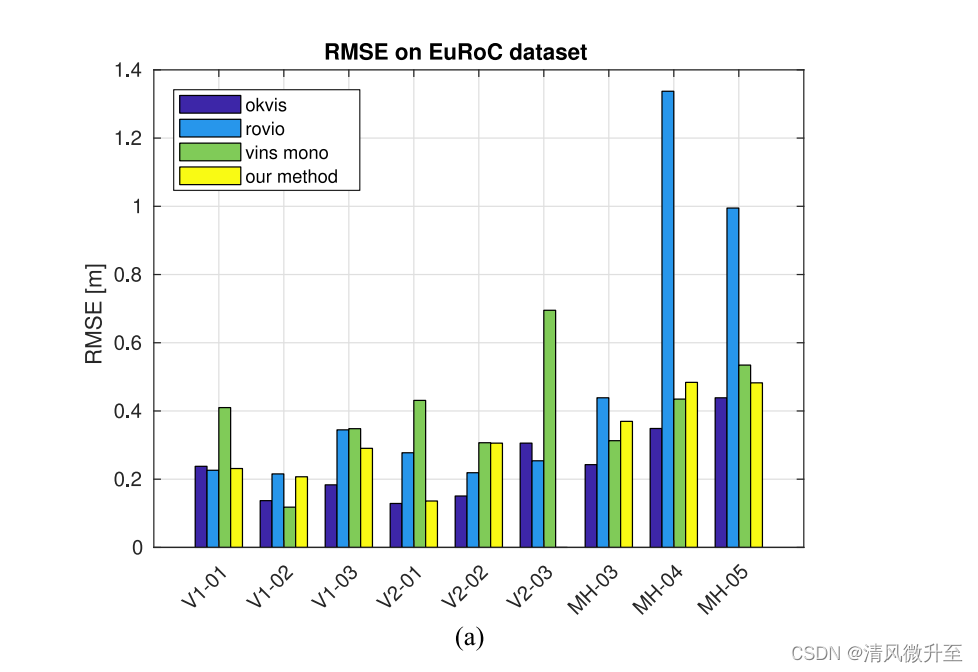
上图来源为msckf-vio配套的论文,Ke Sun等人的“Robust Stereo Visual Inertial Odometry for Fast Autonomous Flight” ,用sci-hub可以方便的下载。















 1109
1109











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









