







1.背景
陀螺漂移是反映在陀螺对运载体角速率测量上的误差。
严恭敏老师在博客中有相关的讨论https://zhuanlan.zhihu.com/p/556696975 ,他比较推荐秦老师教材中的论述。在秦永元老师《卡尔曼滤波与组合导航原理》一书8.4.3节“惯导系统的误差源模型”相关论述较为清晰,现以此为主要内容讨论。
2. 具体介绍
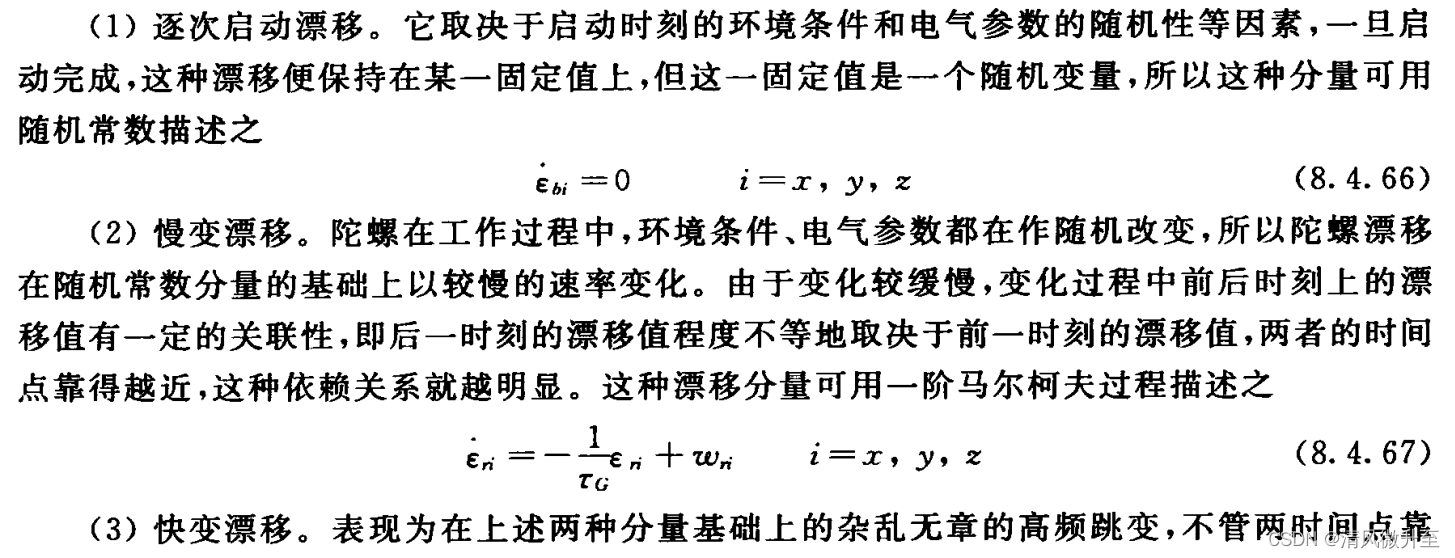
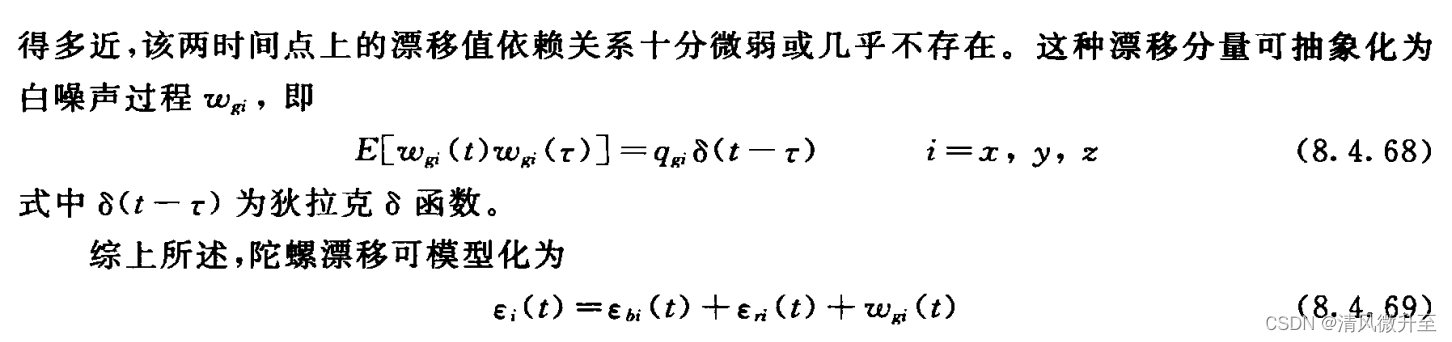
陀螺仪的漂移可分为三部分,分别为逐次启动漂移(随机常值),慢变漂移(相关分量,一阶马尔克夫过程)和快变漂移(白噪声)过程。下面为其详细的定义:

综合以上两种材料,总结来看,上述漂移的三个部分,白噪声不被列入卡尔曼滤波状态量,可以不用单独考虑,这样只剩下了随机常值和相关漂移,实际使用时的变数是在相关漂移在不同相关时间下的等效。
2.1 相关时间很短(低于数百秒)
此时,相关漂移可近似视为白噪声,因此三项漂移被简化为随机常值+测量白噪声两项。测量白噪声的方差阵可由allan方差中的角度随机游走系数给出。具体展开:
2.2 相关时间较长
相关时间比较长时,且大于惯导工作时间时,随机常值+相关漂移二者可用一个等效相关漂移来描述,此时,陀螺漂移建模为一阶马尔科夫过程+测量白噪声。此时,一阶马尔科夫过程的驱动噪声的方差,由allan方差中的零偏不稳定性通过下面公式计算得到
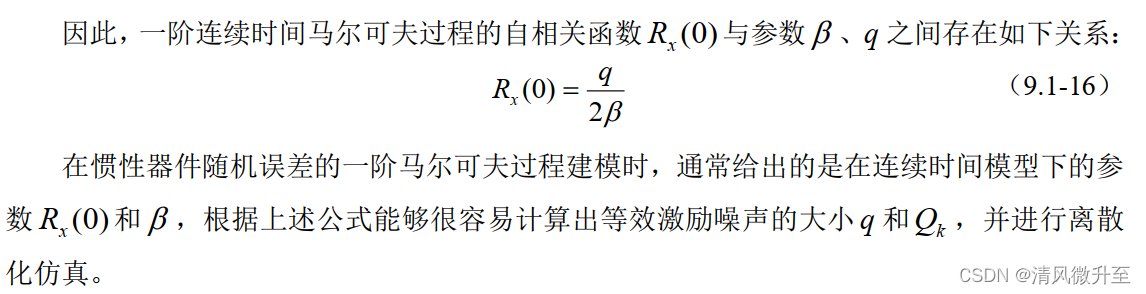
在上图中,可将零偏不稳定性为Rx(0),将其乘上2beta(相关时间的倒数),即为(连续时间)等效激励噪声的方差阵。后面将q离散化可得到等效离散化噪声方差阵Qk。
对于为什么将零偏不稳定性视为Rx(0),推测其原因为:仔细看《惯性仪器测试与数据分析》的9.1.2节的推导过程,最后的Rx(0)其实是对方差的替代,而allan方差中,零偏不稳定性(因其1/f噪声,功率谱密度与频率成反比,低频特性)表征的是零偏的缓慢波动特性,和一阶马尔科夫过程表征的零偏慢变漂移是契合的,这样应该可以定性的讲得通。
此外,可根据单位进行辅助确认。具体来讲,。从单位上也可以进行推断,R0 单位(°/s)^2,乘上反时间系数1/s,后面离散化再乘上时间s,最终开方后,单位仍然是°/s,这符合它叠加到角速率上的特点。严老师的教材《惯性仪器测试与数据分析》中,例9.2.1中的仿真例程里有很清晰的使用(在附录D.4)。
2.3 相关时间很长
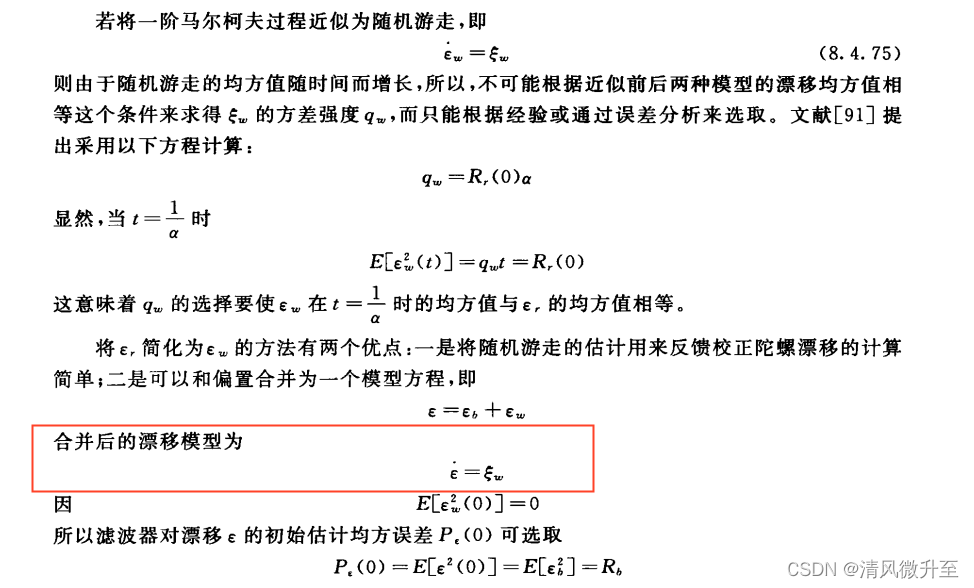
相关时间很长时(较2.2长),相关漂移可近似看做随机游走。之所以是可近似成随机游走,在8.4.67中,相关事件Tau_G若很大时,其倒数可近似为0,因此该项可忽略,于是可直接得到
 正是随机游走过程的公式。
正是随机游走过程的公式。
相关漂移近似为随机游走时,可与随机常值进行合并,即可得到很常用的IMU陀螺仪漂移的随机游走(合并了随机常值)+测量白噪声;
那上述的方差如何求呢?待分析书中的求法。
这在vslam领域多见,一些vslam的书、开源项目都是如此。而有关INS及组合导航的文献,sola的《Quaternion kinematics for the error-state Kalman filter》中也是这么定义的。
例如,vslam领域里应用广泛的imu-camera标定开源工具kalibr中,imu建模就是这种情况。
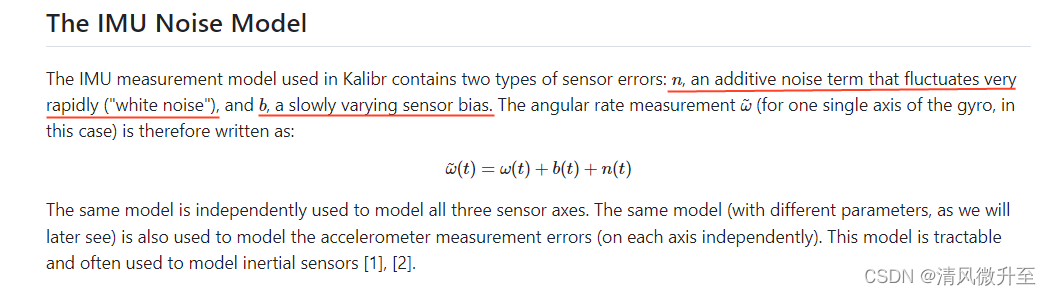
这里n(t)表示陀螺仪的测量白噪声,而b(t)表示慢变漂移,即相关漂移。其中,b(t)的一阶微分形式如下图所示:
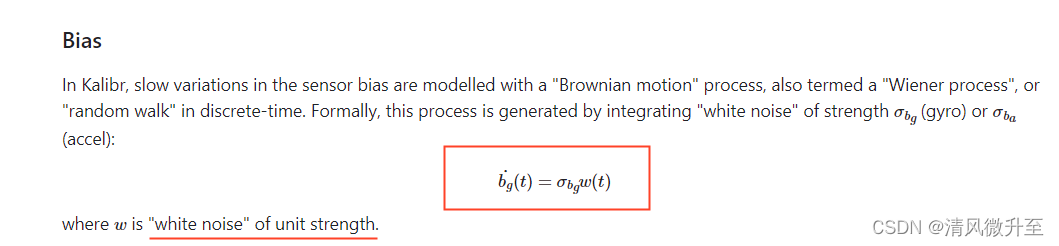
这个形式与上面的合并后的模型是一致,即表示kalibr中将IMU漂移建模为了随机游走(合并了随机常值)+测量白噪声。
2.4 相关时间非常长
相关时间非常长时(较2.3长),即相关时间远大于惯导工作时间,相关漂移可近似看做随机常值。在2.3的基础上,再忽略驱动白噪声,则相关漂移的一阶微分为0,这正是随机常值的公式。

这时,相关漂移可近似看做随机常值而并入陀螺的逐次启动误差内,这样生成的等效随机常值漂移的方差为原逐次启动误差和相关漂移方差之和。
3. 噪声参数从何而来?
一般来说,可以通过allan方差获取噪声参数,注意其单位间的转换关系。下图为kalibr工具示意的allan方差图:
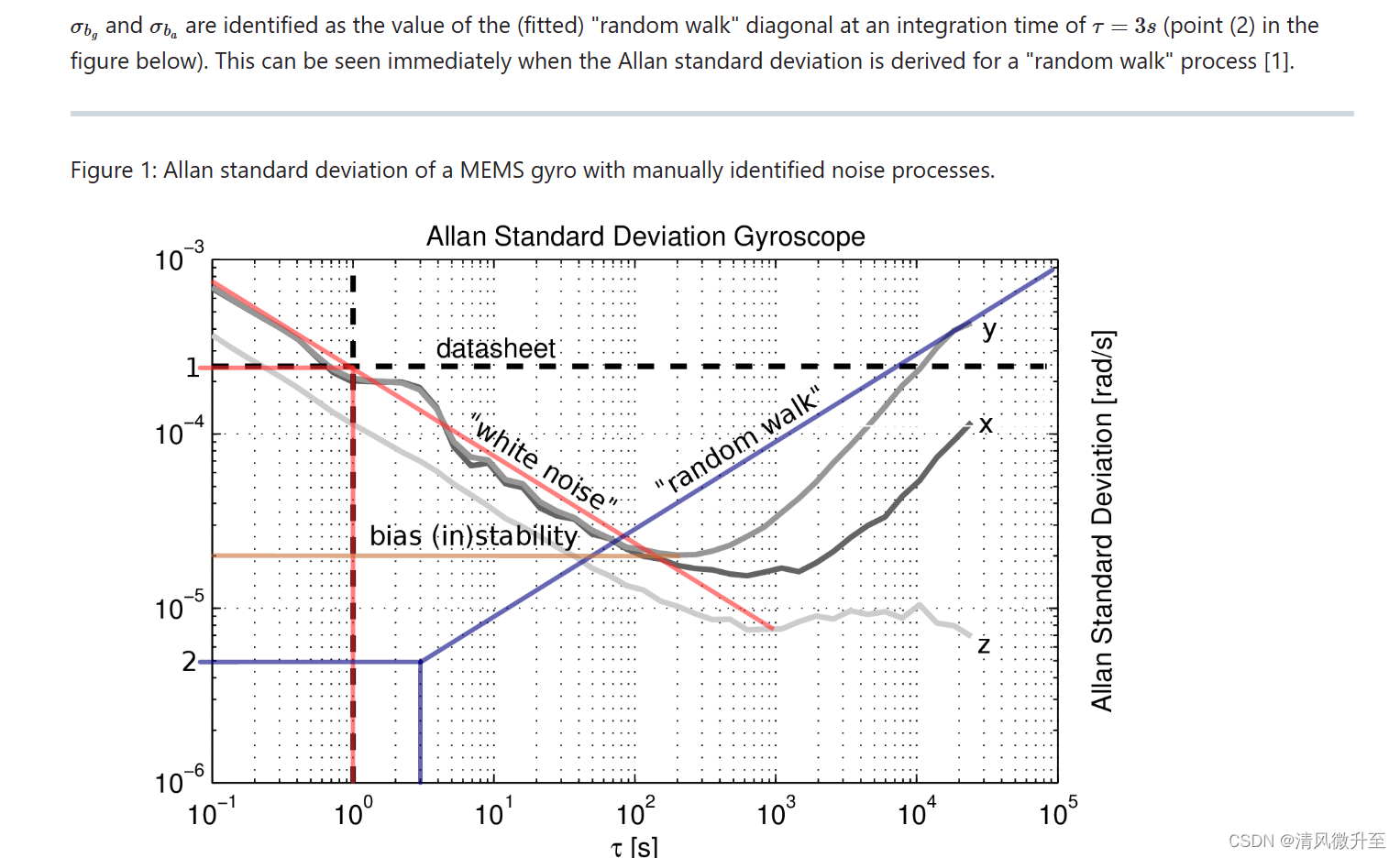
上图中,allan方差的角度随机游走系数可用于设置Q阵中的gyro测量白噪声的方差。
零偏不稳定性系数可用于设置,一阶马氏过程+测量白噪声建模下的马氏过程的驱动噪声的方差。
角速率随机游走系数可用于设置“随机游走”建模下的驱动噪声方差。
杂七杂八写了不少,还请各位同行指点。
4. 加速度计
加速度计的分析与陀螺仪类似,但在组合导航设计中,一般仅考虑随机常值误差,而忽略相关漂移。因为加计中的相关漂移较小,忽略它同时也可以使得滤波器维数尽量低些。总的来看,加速度计的漂移一般建模为随机常值+测量白噪声。
实际使用中,也可与陀螺仪采用类似的方式进行建模,通过合并随机常值+相关漂移来减低卡尔曼滤波的维数。

















 515
515

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









