







 根据euroc数据集论文,分析数据集格式。imu data.csv该文件中,陀螺仪和加速度计数据都是在传感器坐标系下表示的。也就是上右前/上左后??但是z轴加速度是负的,难道是上左后坐标系???position / pose地面位置对于地面真实数据(1)Leica Nova MS50激光轨迹跟踪器测量了安装在MAV顶部棱镜的位置。测量精度mm级别,频率20Hz(2) 有一些数据集,Vicon运动捕捉系统提供了坐标系的6D位姿信息,该坐标系是由安装在微型飞行器上的一
根据euroc数据集论文,分析数据集格式。imu data.csv该文件中,陀螺仪和加速度计数据都是在传感器坐标系下表示的。也就是上右前/上左后??但是z轴加速度是负的,难道是上左后坐标系???position / pose地面位置对于地面真实数据(1)Leica Nova MS50激光轨迹跟踪器测量了安装在MAV顶部棱镜的位置。测量精度mm级别,频率20Hz(2) 有一些数据集,Vicon运动捕捉系统提供了坐标系的6D位姿信息,该坐标系是由安装在微型飞行器上的一
根据euroc数据集论文,分析数据集格式。
imu data.csv
该文件中,陀螺仪和加速度计数据都是在传感器坐标系下表示的。
也就是上右前/上左后??
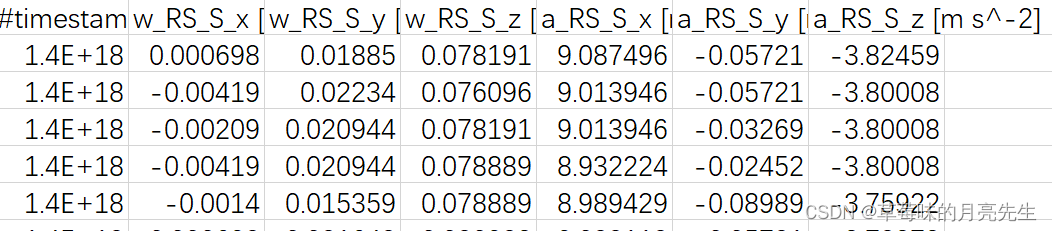
但是z轴加速度是负的,难道是上左后坐标系???
position / pose
地面位置
对于地面真实数据
(1)Leica Nova MS50激光轨迹跟踪器测量了安装在MAV顶部棱镜的位置。
测量精度mm级别,频率20Hz
(2) 有一些数据集,Vicon运动捕捉系统提供了坐标系的6D位姿信息,该坐标系是由安装在微型飞行器上的一组反射标记定义的。
地面原始数据是根据各自的棱镜或者标记坐标系进行报告。如下图所示,棱镜(prism)和标记(marker)都在顶部

对于MH_05来说,地面真实数据是6D位姿信息,给出了传感器相对参考坐标系的3维位置和方向
vicon0和Leica0的坐标系定义为前左上/后右上
然后在论文的5.2节,
来自跟踪系统(leica system 和 vicon运动捕获系统)在
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1432
1432











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









