概要
编码器接口简介
- 编码器接口可接受增量(正交)编码器的信号,根据编码器旋转产生的正交脉冲信号,自动控制CNT自增或自减,从而指示编码器的位置、旋转方向和旋转速度。
- 每个高级定时器和通用定时器都拥有一个编码器接口(TIM使用了编码器模式,就很难干其他活了)
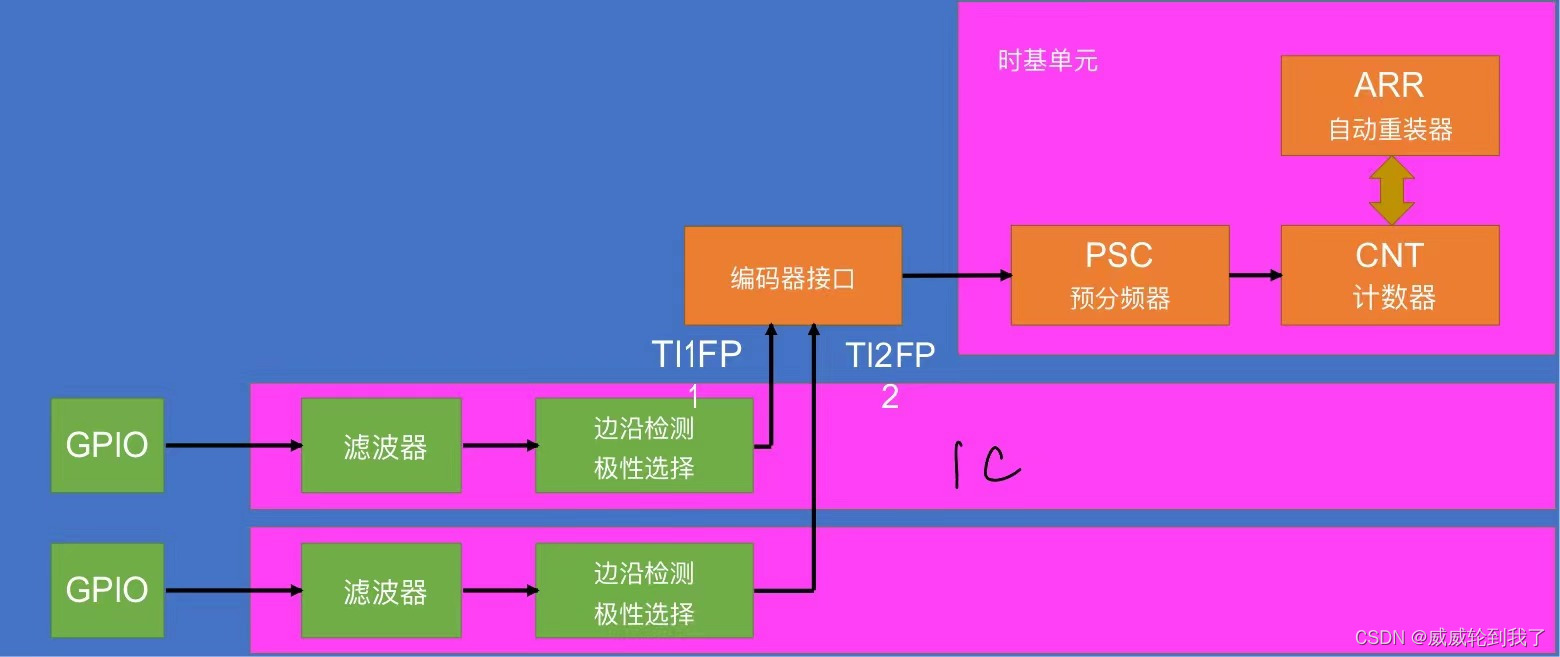
- 两个输入引脚借用了输入捕获通道1和通道2
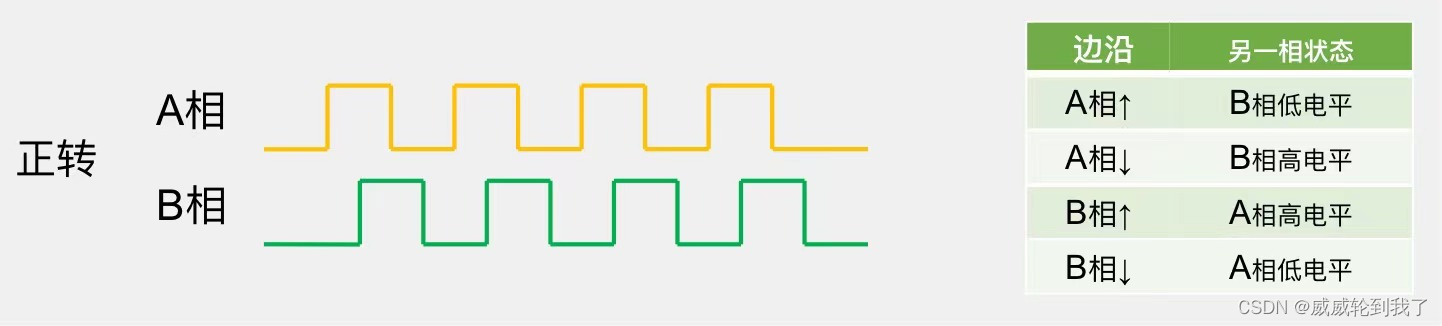
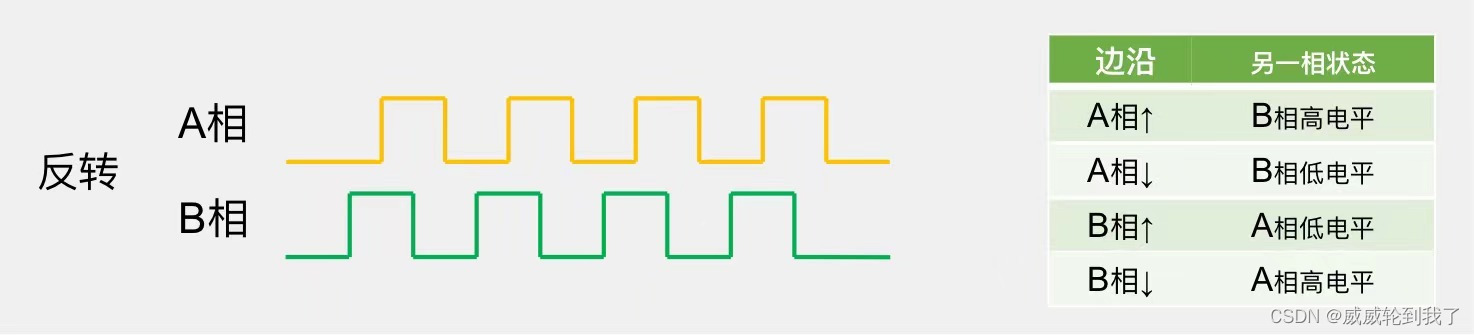
正交编码器
- 如何表示向量?一个波形带方向,另外一个是数值(例如PWM波),这样子也可以实现旋转的正旋转跟逆旋转。
- 在此基础上改进,加入一个数值(例如PWM波)相差90度相位。
编码器接口
- 基本结构
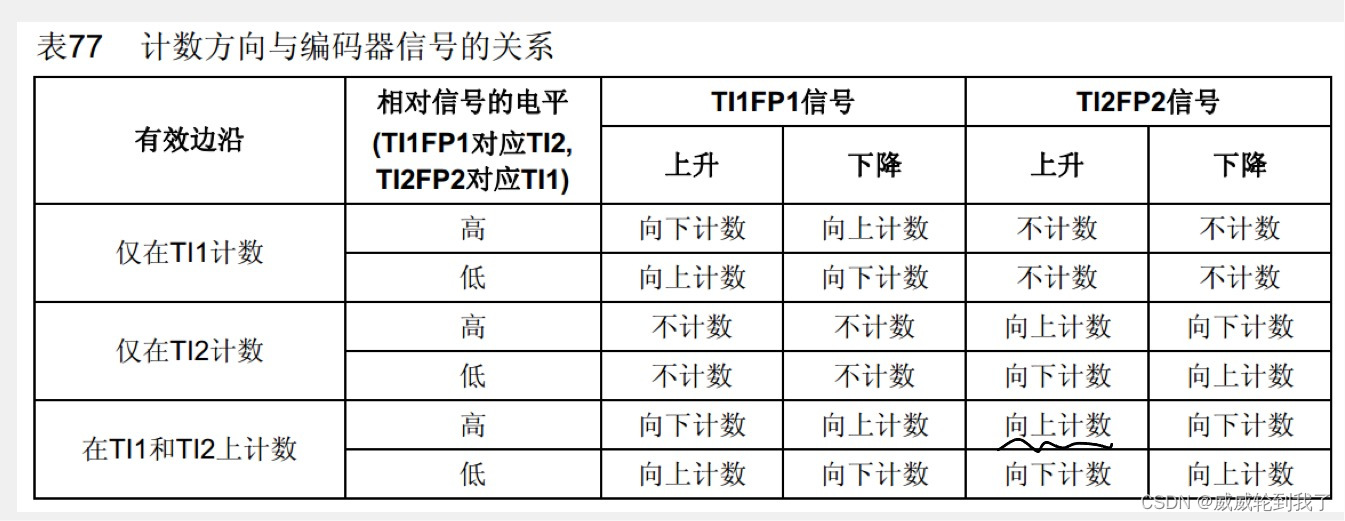
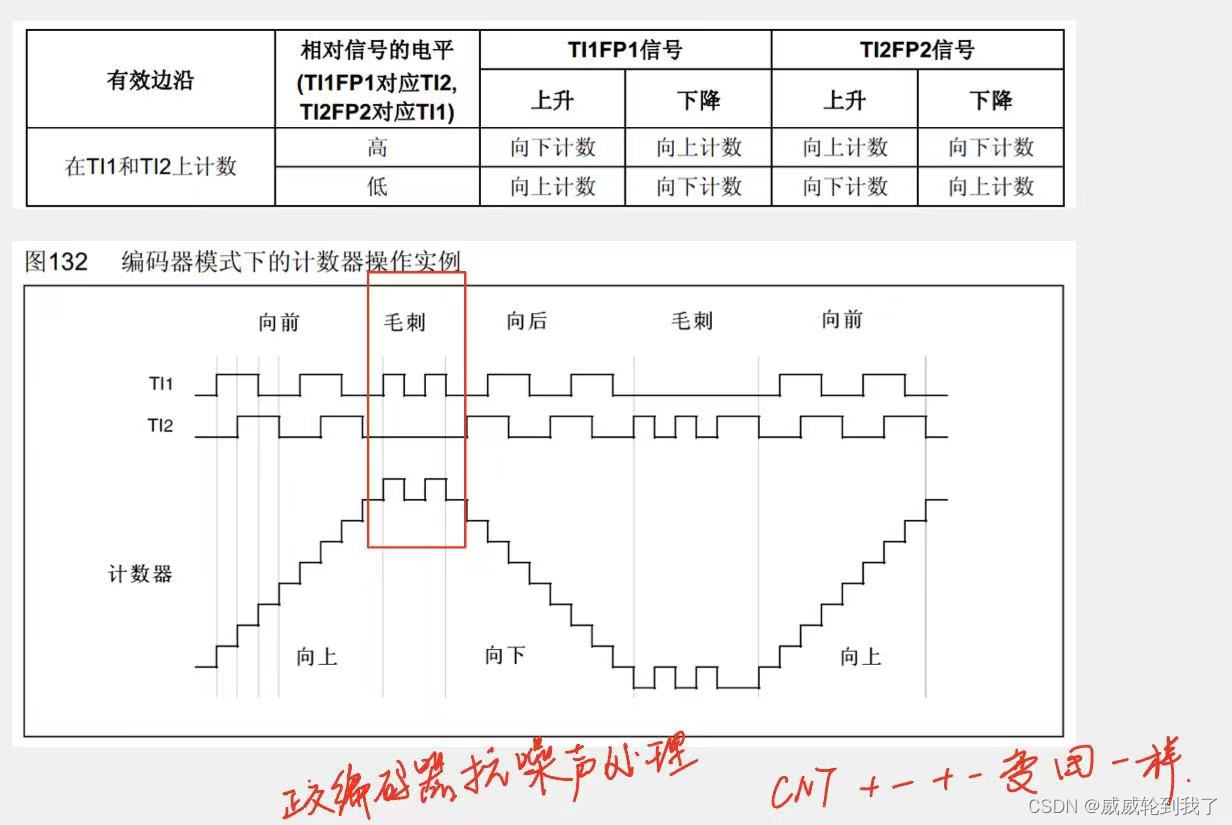
- 工作模式(总结:正转向上计数,反转向下计数)
- 实例
实现逻辑及代码
- 配置GPIO
- 配置IC1中TI1FP1及IC2中的TI2FP2
- 使用TIM_EncoderInterfaceConfig配置编码器
#include "stm32f10x.h"
void Encoder_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
GPIO_InitTypeDef GPIO_InitTypeDefStructure;
GPIO_InitTypeDefStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_InitTypeDefStructure.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1;
GPIO_InitTypeDefStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitTypeDefStructure);
TIM_ICInitTypeDef TIM_ICInitTypeDefStructure;
TIM_ICStructInit(&TIM_ICInitTypeDefStructure);
TIM_ICInitTypeDefStructure.TIM_Channel = TIM_Channel_1;
TIM_ICInitTypeDefStructure.TIM_ICFilter = 0xf;
TIM_ICInitTypeDefStructure.TIM_ICPolarity = TIM_ICPolarity_Rising;
TIM_ICInitTypeDefStructure.TIM_ICPrescaler = TIM_ICPSC_DIV1;
TIM_ICInit(TIM2, &TIM_ICInitTypeDefStructure);
TIM_ICInitTypeDefStructure.TIM_Channel = TIM_Channel_2;
TIM_ICInit(TIM2, &TIM_ICInitTypeDefStructure);
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitTypeDefStructure;
TIM_TimeBaseStructInit(&TIM_TimeBaseInitTypeDefStructure);
TIM_TimeBaseInitTypeDefStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseInitTypeDefStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInitTypeDefStructure.TIM_Period = 0xffff;
TIM_TimeBaseInitTypeDefStructure.TIM_Prescaler = 0;
TIM_TimeBaseInitTypeDefStructure.TIM_RepetitionCounter = 0;
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseInitTypeDefStructure);
TIM_EncoderInterfaceConfig(TIM2, TIM_EncoderMode_TI12, TIM_ICPolarity_Rising, TIM_ICPolarity_Rising);
TIM_Cmd(TIM2, ENABLE);
}
int16_t Encoder_GetSpeed(void)
{
int16_t tmp;
tmp = TIM_GetCounter(TIM2);
TIM_SetCounter(TIM2, 0);
return tmp;
}
























 272
272











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











