







 本文围绕STM32编码器接口展开,介绍其在电机控制项目中的应用,可接收增量编码器信号,控制CNT计数。阐述了正交编码器原理、接口基本结构和工作模式,通过实例说明抗噪声和反相处理。还给出编码器接口测速的接线图、代码思路及相关库函数。
本文围绕STM32编码器接口展开,介绍其在电机控制项目中的应用,可接收增量编码器信号,控制CNT计数。阐述了正交编码器原理、接口基本结构和工作模式,通过实例说明抗噪声和反相处理。还给出编码器接口测速的接线图、代码思路及相关库函数。
前言
编码器测速一般应用在电机控制的项目上,使用PWM驱动电机,再使用编码器测量电机的速度,再用PID算法进行闭环控制,编码器接口模式基本上相当于使用了一个带有方向选择的外部时钟。
编码器接口
简介
- Encoder Interface 编码器接口
- 编码器接口可接收增量(正交)编码器的信号,根据编码器旋转产生的正交信号脉冲,自动控制CNT自增或自减,从而指示编码器的位置、旋转方向和旋转速度,编码器接口实际上相当于一个带有方向控制的外部时钟,同时控制CNT的计数时钟和计数方向;
- 每个高级定时器和通用定时器都拥有一个编码器接口;
- 两个输入引脚借用了输入捕获的通道1和通道2;
正交编码器
正交编码器一般可以测量位置,或者带有方向的速度值,有两个信号输出引脚,A相和B相;
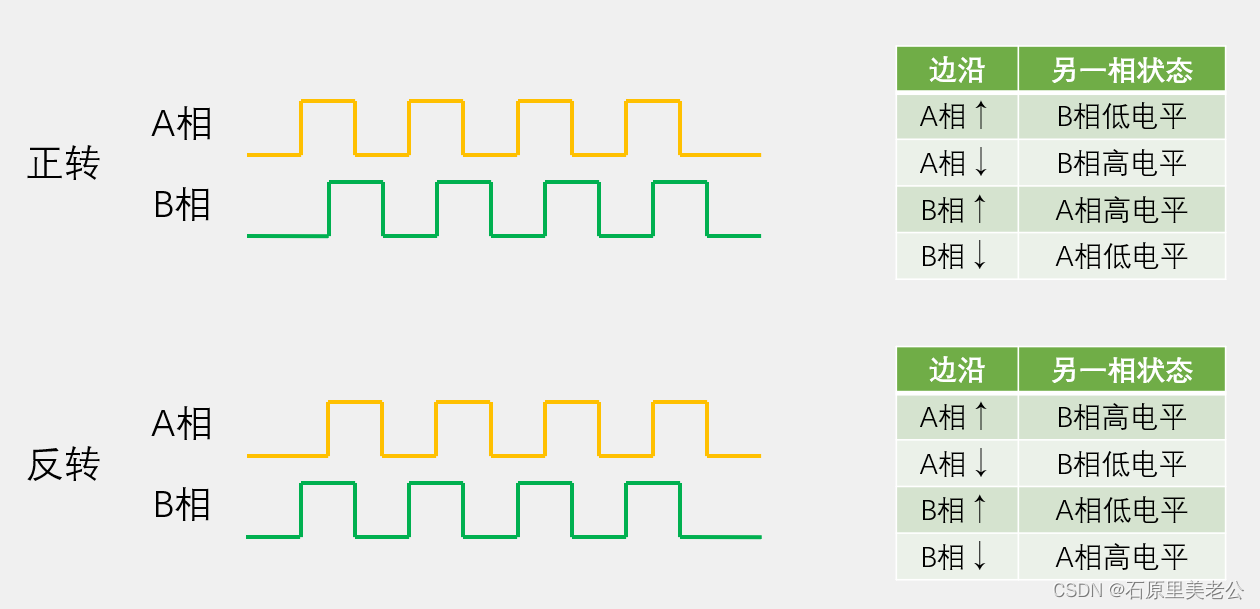 当编码器的旋转轴转起来时,A相和B相会输出方波信号,转的越快方波频率越高,通过测量方波频率即可得知速度,测量方向需要两根线;
当编码器的旋转轴转起来时,A相和B相会输出方波信号,转的越快方波频率越高,通过测量方波频率即可得知速度,测量方向需要两根线;
当A、B相出现右边两个表的现象时,对应正转或反转;
编码器的设计逻辑:把A相和B相的所有边沿作为计数器的计数时钟,出现边沿信号时,就计数自增或自减,正转的状态都向上计数,反转的状态都向下计数;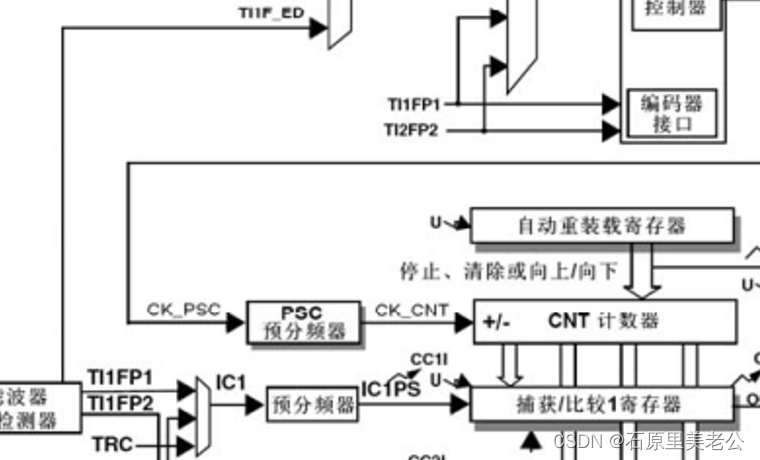 注意此时在时基单元初始化设置的计数方向并不会使用,因为此时计数方向和计数时钟都处于编码器托管的状态,计数器的自增和自减都受编码器控制;
注意此时在时基单元初始化设置的计数方向并不会使用,因为此时计数方向和计数时钟都处于编码器托管的状态,计数器的自增和自减都受编码器控制;
编码器接口基本结构
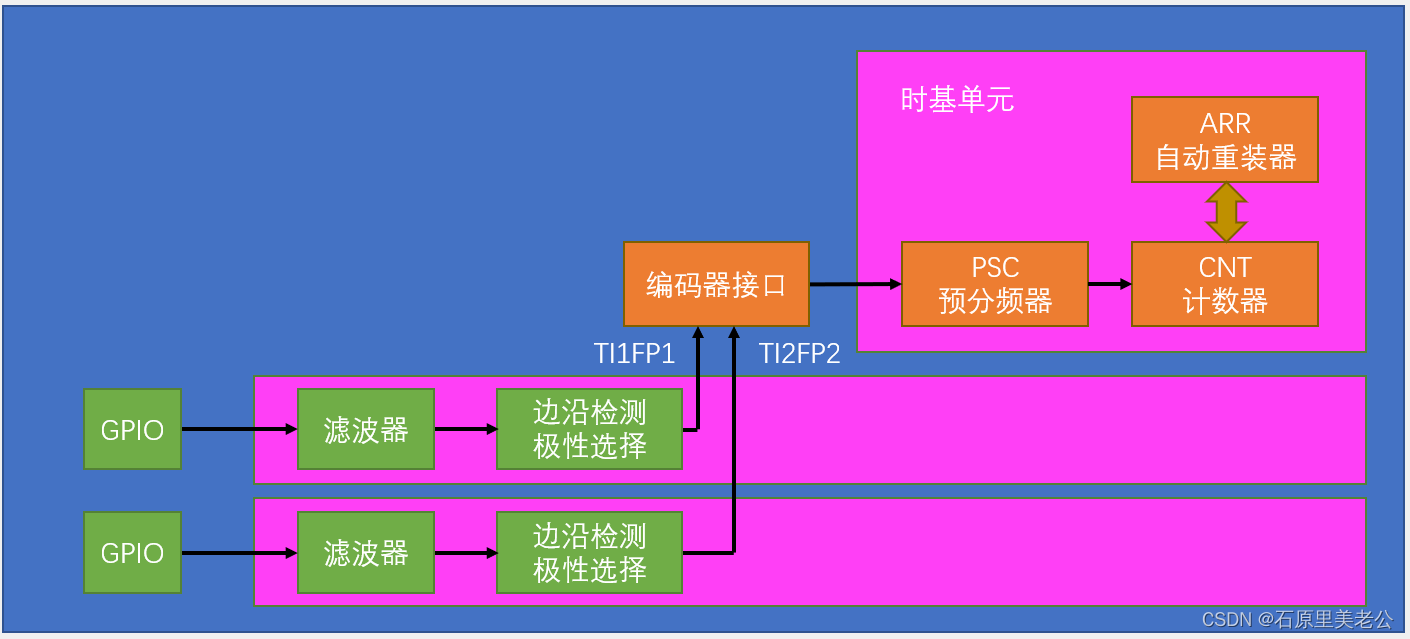
输入捕获的前两个通道,通过GPIO口接入编码器的A、B相,然后通过滤波器和边沿检测极性选择,产生TI1FP1和TI2FP2,然后通过编码器接口,编码器接口通过预分频器控制CNT计数器的时钟,同时编码器接口根据编码器的旋转方向,控制CNT的计数方向,一般设置ARR为65535;
工作模式
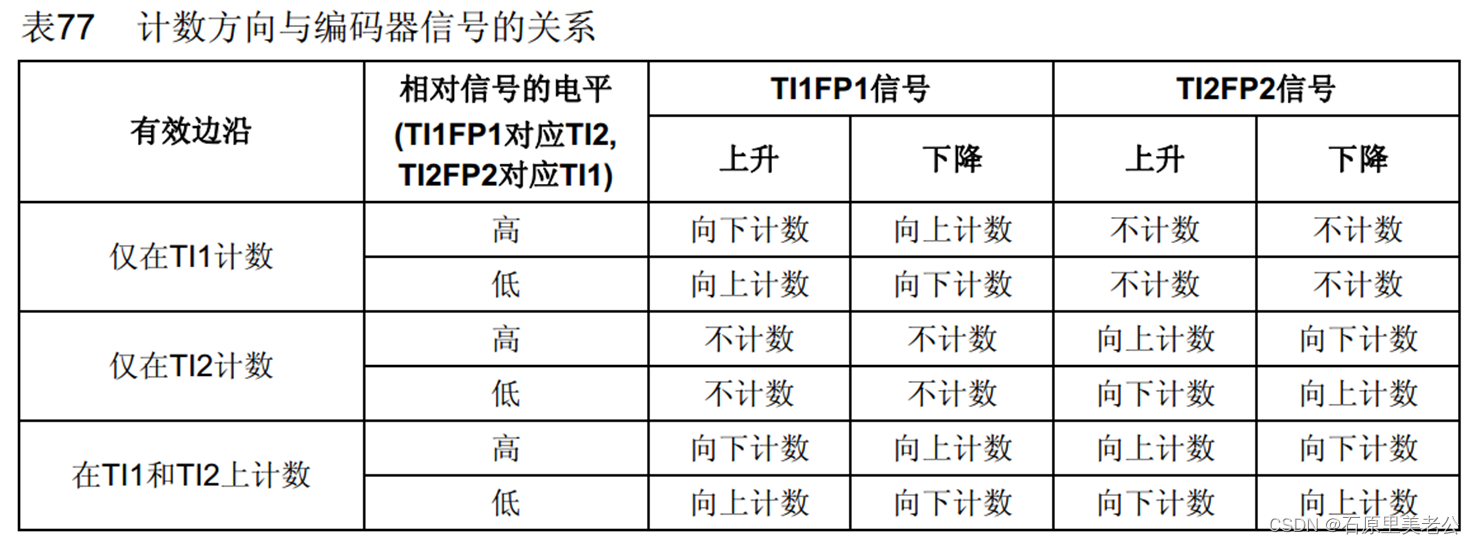
仅在TI1或TI2计数表示的意思是,仅在A相或B相的边沿计数,忽略B相或A相的边沿,看一个相的边沿上升下降和另一个相的高低电平的对应关系,即在一个周期看2次对应关系;
而在TI1和TI2计数表示的关系是,A相和B相的边沿计数都要看,即在一个周期看4次对应关系;
一般使用在TI1和TI2上计数的模式,因为精度最高;
实例
均不反相
编码器抗噪声原理:当方波信号出现毛刺时,按照编码器执行逻辑出现的结果与刚开始时不变,由此达到抗噪声效果;
TI1反相
即边沿检测极性选择中把TI1的方波信号反相处理,在对照信号表时需要把TI1的信号高低电平互换,这样才是反相后实际给编码器接口的电平;
当发现计数方向与我们预期相反时,只要调整一下极性即可;
代码
编码器接口测速
接线图
代码思路
- RCC开启时钟,开始GPIO和定时器的时钟;
- 配置GPIO,把PA6和PA7配置成输入模式;
- 配置时基单元,预分频器一般不分频,ARR一般给最大65535;
- 配置输入捕获单元;
- 配置编码器接口模式;
- 调用TIM_Cmd,启动定时器;
库函数
TIM_EncoderInterfaceConfig定时器编码器接口配置;
GPIO模式可以选择上拉、下拉和浮空,通过接在该引脚的外部模块输出的默认电平来确定选择哪种模式,和外部模块保持默认状态一致,防止默认电平打架;
如果外部模块空闲默认输出高电平,选择上拉输入,默认输入高电平;如果外部模块空闲默认输出低电平,选择下拉输入,默认输入低电平;
编码器接口会托管时钟,所以这里不需要选择时钟源,编码器接口就是一个带方向的外部时钟;
输入捕获单元只使用了通道1和通道2的滤波器和极性选择,这里的极性选择中上升沿代表的是高低电平不反转;
总结
本节内容对应手册的14.3.12编码器接口模式。

















 7675
7675

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









