






ORB-slam2实验数据分析
1. 下载RGB-D数据集并运行
(1)运行得到轨迹数据 CameraTrajectory.txt
(2)将数据集中的目录的 groundtruth.txt , 以轨迹数据复制到同一个文件夹Result_analysis
2.测评工具
网址:https://cvg.cit.tum.de/data/datasets/rgbd-dataset/tools#evaluation
其中 Evaluation部分:计算ATE 和RPE
下载: associate.py evaluate_rpe.py evaluate_ate.py 到刚才的文件夹Result_analysis中;
3.测试(python2.7)
3.1 ATE
(1)计算绝对轨迹误差ATE的RMSE、MEAN、STD等等
python evaluate_ate.py groundtruth.txt CameraTrajectory.txt --verbose
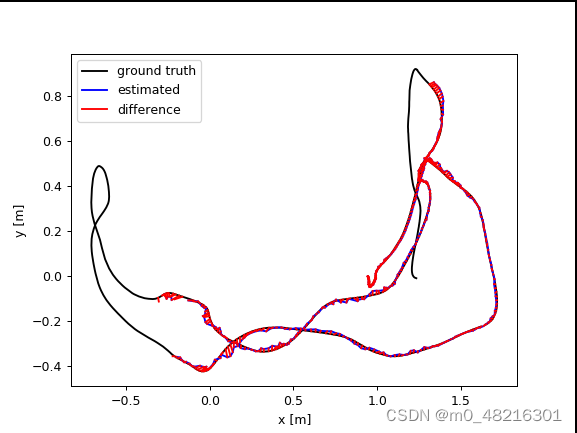
(2)绝对轨迹误差ATE:真实轨迹和相机轨迹直观图(ate图)
python evaluate_ate.py groundtruth.txt CameraTrajectory.txt --plot ate.png
(画图需要安装matplotlib,对应相应的python版本:sudo pip install matplotlib )
出现问题:

解决:下载python脚本文件时,associate.py必须也下载到同一个文件夹
3.2 RPE
(1)计算相对轨迹误差RPE的RMSE、MEAN、STD等等
python evaluate_rpe.py groundtruth.txt CameraTrajectory.txt --verbose
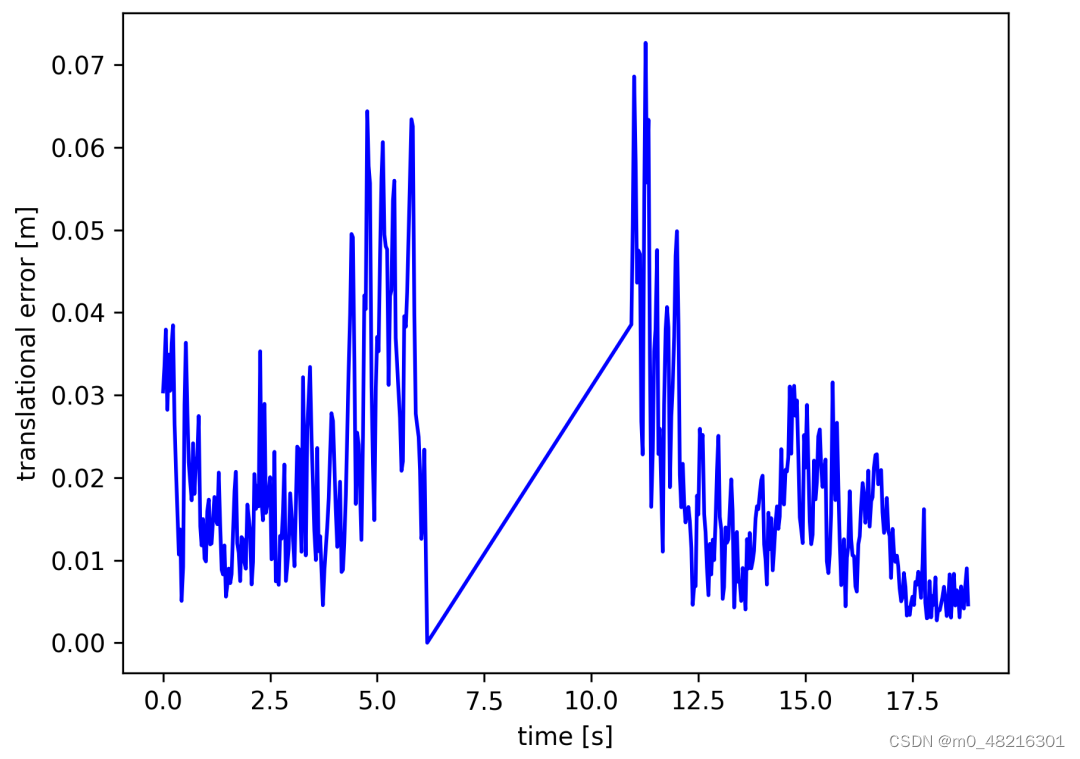
(2)rpe图
python evaluate_rpe.py groundtruth.txt CameraTrajectory.txt --fixed_delta --plot PLOT















 1078
1078











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









