







可以用下面的链接安装ros
安装ros
在home下建立workspace,添加环境变量
export $ROS_PACKAGE_PATH=ROS_PACKAGE_PATH:/home/workspace
在workspace下建立src文件夹,将fdilink_ahrs_ROS1解压在src目录下面
在workspace下运行以下命令:
catkin_make -DCATKIN_WHITELIST_PACKAGES=fdilink_ahrs
初始化setup.bash
source devel/setup.bash
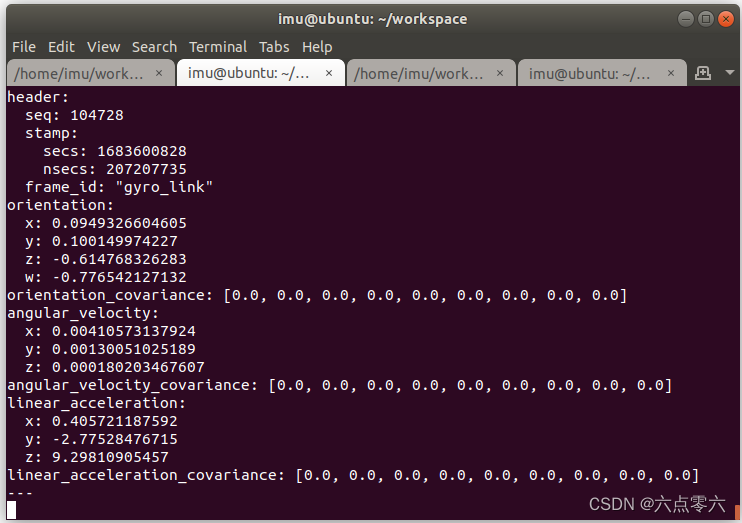
接下来可以输入两个命令可以看见imu的输出
roslaunch fdilink_ahrs ahrs_data.launch
#新建终端输入命令
rostopic echo /imu
imu输出如图所示:
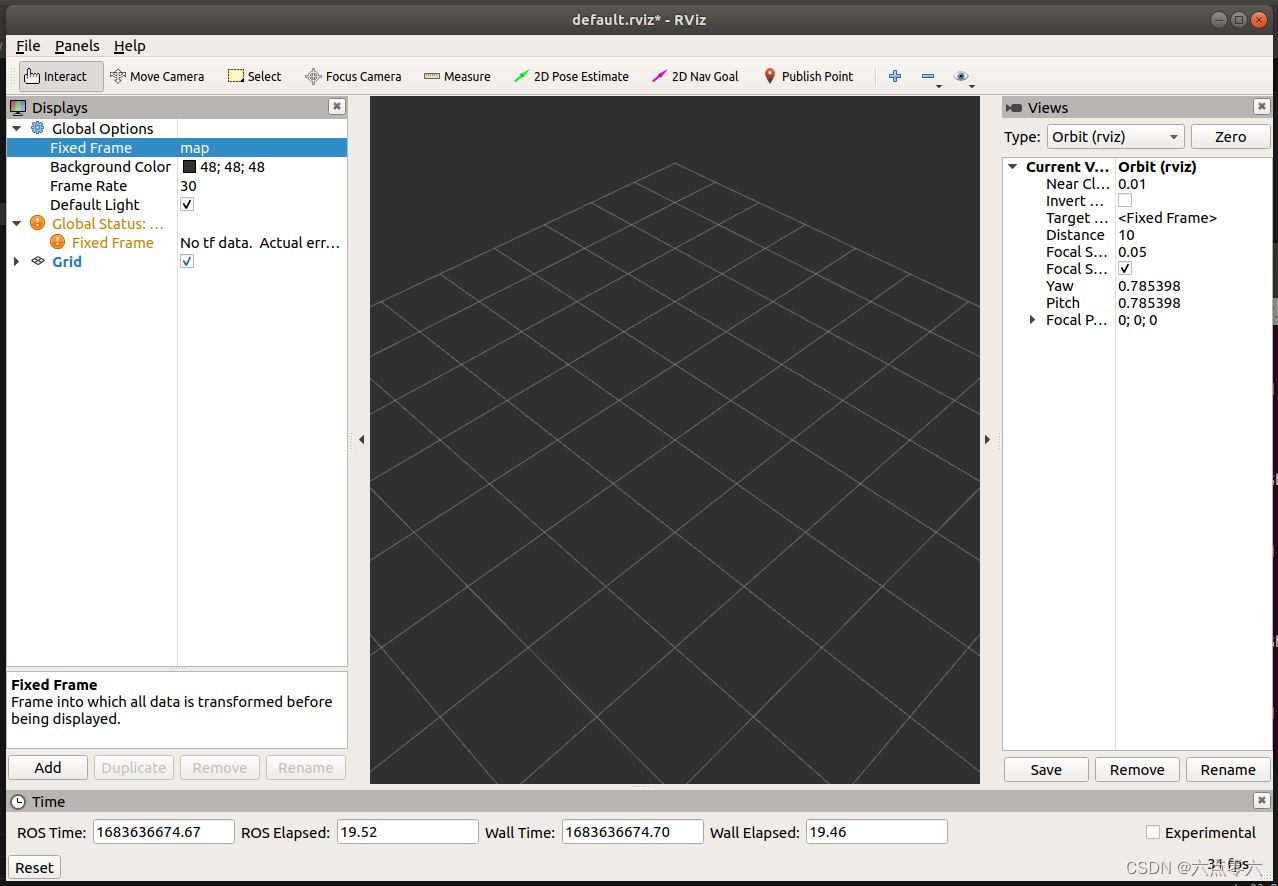
用rviz可视化
roslaunch fdilink_ahrs tf.launch
#新建终端输入命令
rviz
如图所示,之后将Fixed Frame由map改成其他模式,左下角Add增加TF选项,即可出现效果














 114
114











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









