







 本文介绍了如何在ROS环境中,通过安装rviz_imu_plugin插件,将原始的IMU四元数数据在rviz中进行可视化,并设置了话题和GlobalFrame,确保坐标系正确反映机器人姿态变化。
本文介绍了如何在ROS环境中,通过安装rviz_imu_plugin插件,将原始的IMU四元数数据在rviz中进行可视化,并设置了话题和GlobalFrame,确保坐标系正确反映机器人姿态变化。
原始的IMU姿态数据是四元数,为了方便调试,将IMU数据在rviz中进行可视化。
安装rviz插件
sudo apt install ros-humble-rviz-imu-plugin
在Rviz中可视化Imu数据
如果你的ROS版本不是humble,则将其替换为对应的版本。
安装完毕后,重启rviz在ROS2中直接执行
rviz2
在ROS1中,执行
rviz
点击Rviz的话题添加按钮:

在弹出窗口的窗口中将左边的滑块拉到最下面:
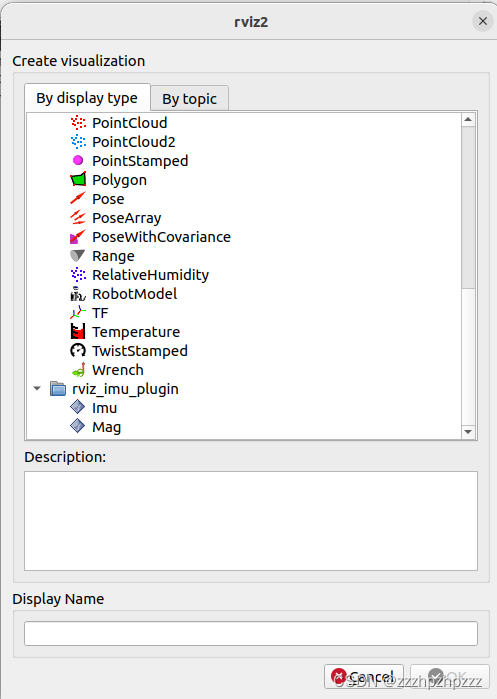
可以看到rviz_imu_plugin,鼠标右键双击IMU

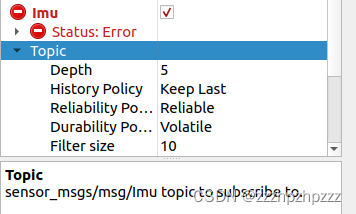
则话题栏中已经出现了imu话题标签,但是显示是红色的,因为此时我们还未设置好话题。
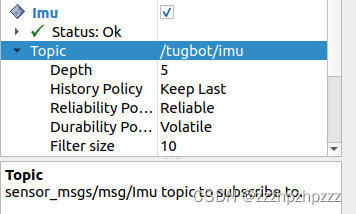
鼠标右键双击Imu,在Topic栏中选好话题:
此时应该如:
如果你的话题标签还是黄色的,如:

则需要检查一下GlobalFrame中的FixedFrame是否设置正确
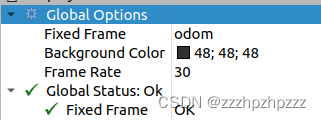
如果此时你的tf树还不完善,可以先将Fixed Frame设置为imu的frame,这样就能正常显示了。
正常显示时,Imu数据会表示为一个坐标系,如:
如果这时候你让机器人倾斜或者选装,此坐标系图标应该会有相应的体现。

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









