






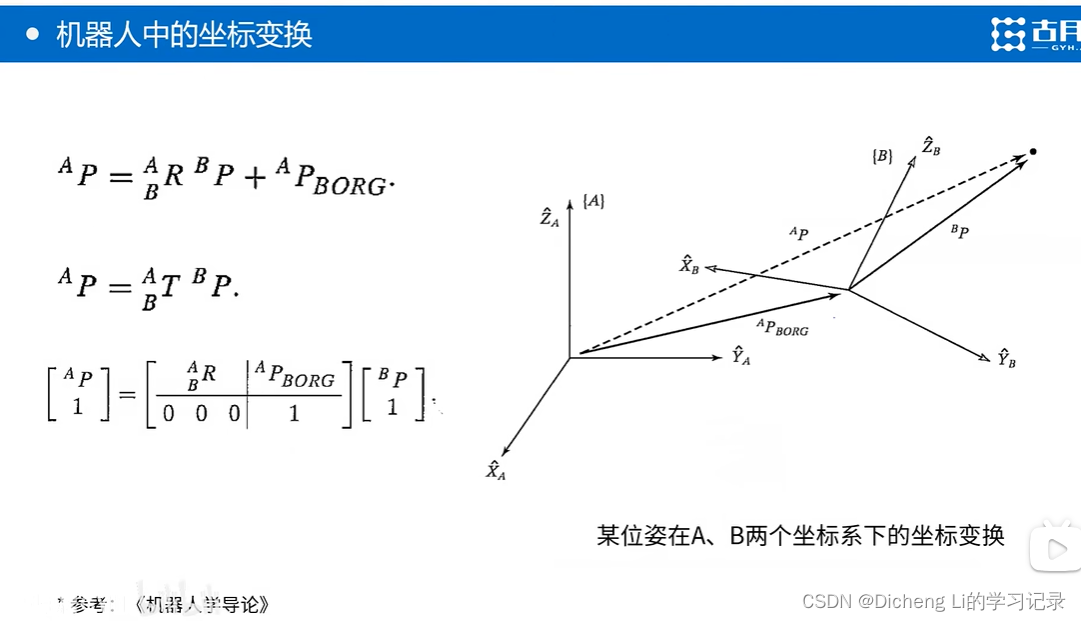
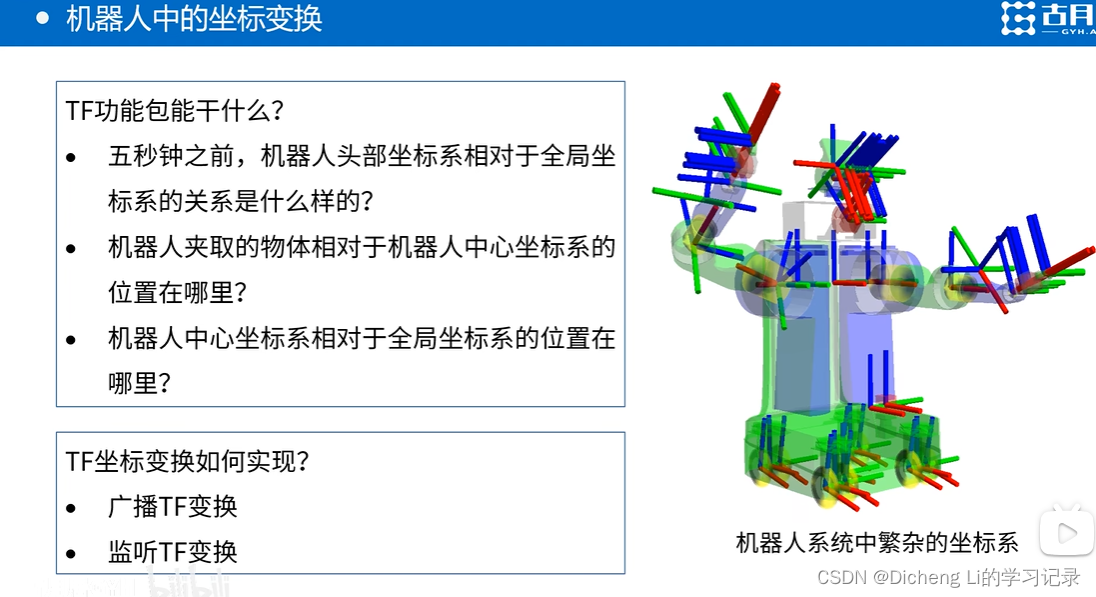
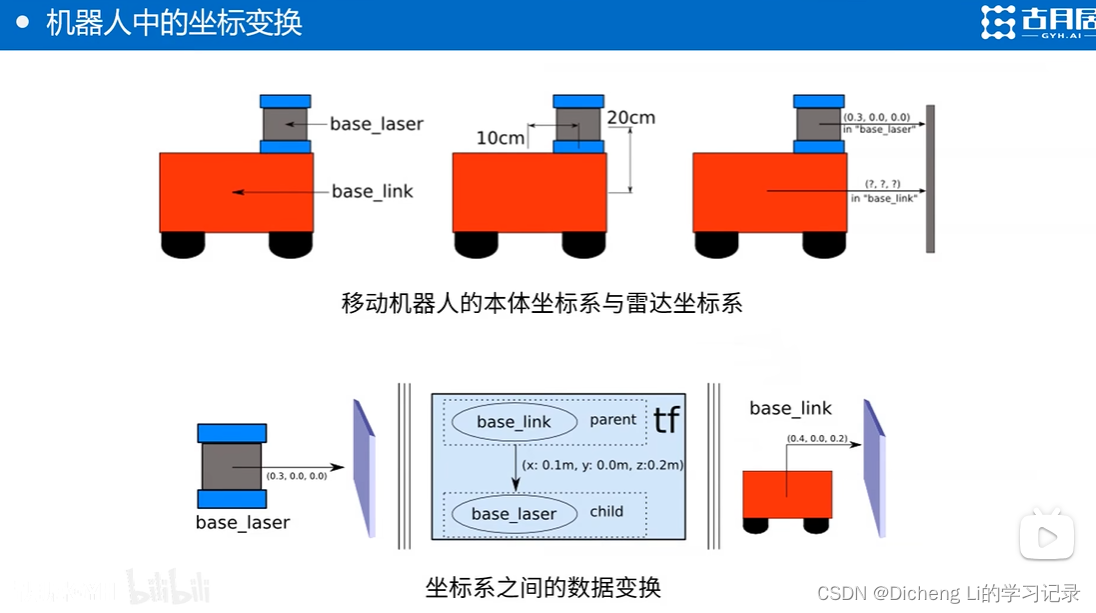
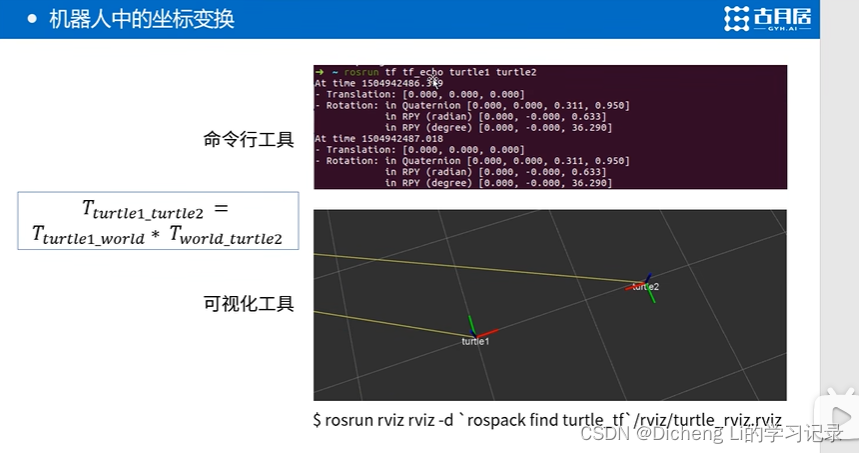
1.机器人中的坐标变换
2.以小海龟为例演示坐标变换
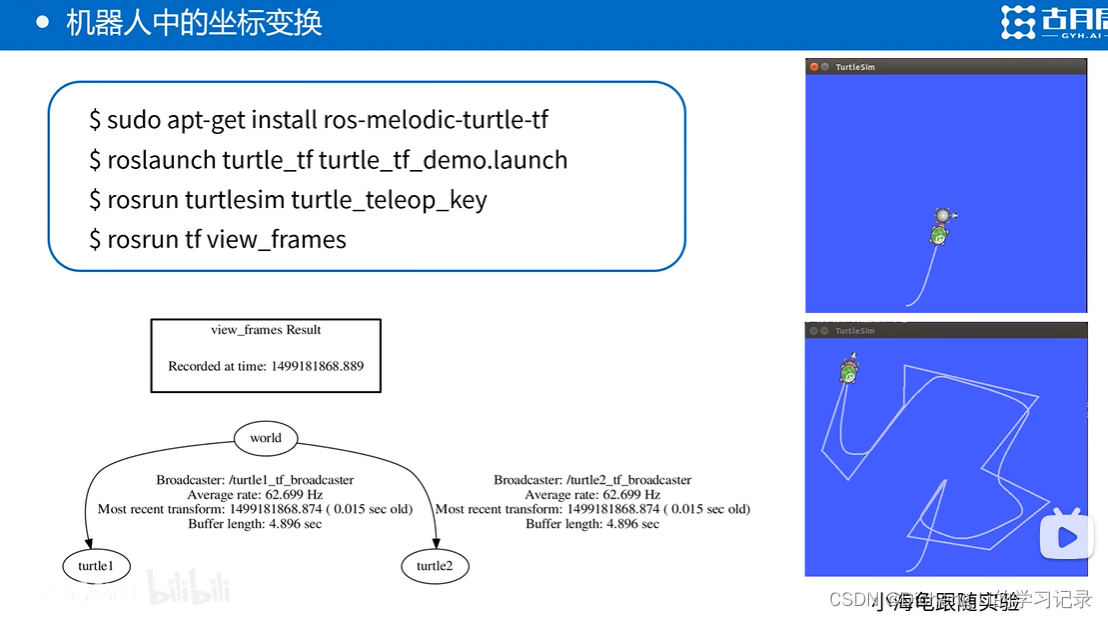
第一步:安装TF包
第二步:运行启动指令
第三步:运行海龟控制节点
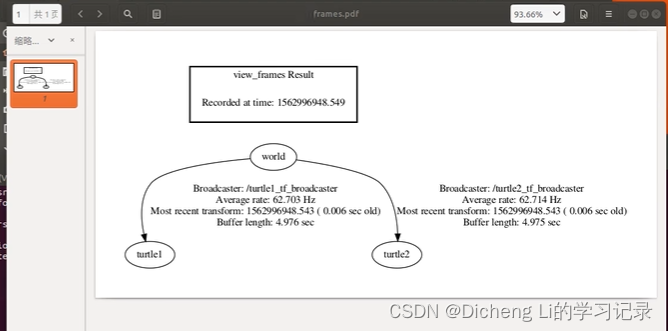
第四步:运行TF功能包中可视化看到TF的工具

输出pdf
第二个工具tf_echo(下图上部分)可以直接查询任意两个坐标之间的关系
第三个工具rviz(下图下部分)三维可视化显示平台
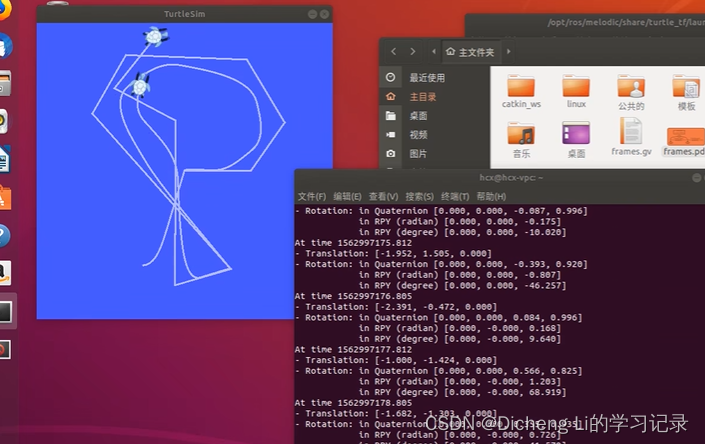
tf_echo可以动态监控两个小海龟的位置变化
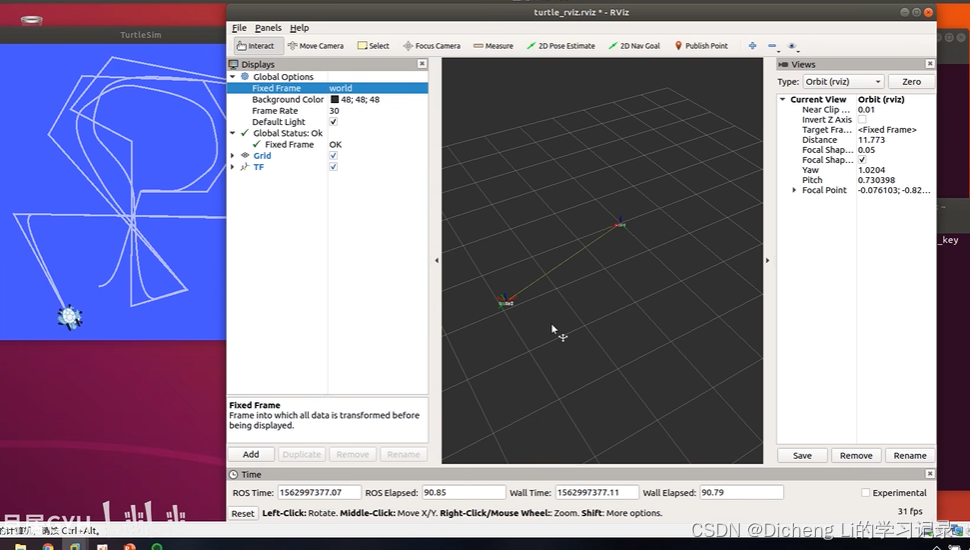
rviz的显示效果

第一步:安装TF包
第二步:运行启动指令
第三步:运行海龟控制节点
第四步:运行TF功能包中可视化看到TF的工具
输出pdf
第二个工具tf_echo(下图上部分)可以直接查询任意两个坐标之间的关系
第三个工具rviz(下图下部分)三维可视化显示平台
tf_echo可以动态监控两个小海龟的位置变化
rviz的显示效果
 552
1677
319
552
1677
319

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言
























