






本文参考李沐老师的《动手学深度学习》课程整理,对课程提供的代码进行解释和注释,当作备忘。原课程链接:13.4. 锚框 — 动手学深度学习 2.0.0 documentation (d2l.ai)
一、将真实边界框(gt_bbox)分配给anchor
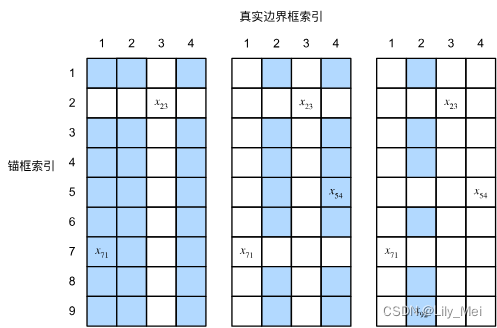
在上一步(深度学习|2D目标检测|锚框实现和IoU计算-CSDN博客)我们已经可以实现一个由anchor索引作为行(i),gt_bbox作为列(j),IoU作为值的矩阵,也就是课程里提到的X。
分配算法
1、在X中找到最大的IoU(和threshold比较),将对应的gt分配给anchor,比如图中的(图源:d2l.ai);
2、从X中去掉(即不予考虑discard)已经分配好的gt对应列和anchor对应行,图中的i=2行和j=3列;
3、重复以上2个步骤直到gt被分配完;
4、在最后一个gt分配完时,仍存在没有被分配到gt的anchor(一般情况下anchor的数量比gt多),那么此时遍历没有gt的anchor所在行,找到其中的最大值,若大于设定好的IoU_threshold则为其分配对应gt,比如i=1,3,4,6,8行的anchor。
代码实现
def assign_anchor_to_bbox(ground_truth, anchors, device, iou_threshold=0.5):
"""将最接近的真实边界框分配给锚框"""
# 获取IoU矩阵的i和j数量
num_anchors, num_gt_boxes = anchors.shape[0], ground_truth.shape[0]
# 位于第i行和第j列的元素x_ij是锚框i和真实边界框j的IoU
jaccard = box_iou(anchors, ground_truth)
# 对于每个锚框,分配的真实边界框的张量
anchors_bbox_map = torch.full((num_anchors,), -1, dtype=torch.long,
device=device) # 首先创建一个全是-1构成的anchor和gt的映射关系矩阵,大小是(i,j)
# 根据阈值,决定是否分配真实边界框
max_ious, indices = torch.max(jaccard, dim=1) # 从列维度找每一列最大的IoU,返回(1*j)和对应最大值的坐标
anc_i = torch.nonzero(max_ious >= iou_threshold).reshape(-1) # anchor所在的每一行大于threshold的索引,并拉平成行向量
box_j = indices[max_ious >= iou_threshold] # gt所在的每一列大于threshold的索引
anchors_bbox_map[anc_i] = box_j
col_discard = torch.full((num_anchors,), -1)
row_discard = torch.full((num_gt_boxes,), -1)
# 遍历全部的gt列
for _ in range(num_gt_boxes):
max_idx = torch.argmax(jaccard) # 求出对应的map里最大IoU对应的坐标
box_idx = (max_idx % num_gt_boxes).long()
anc_idx = (max_idx / num_gt_boxes).long()
anchors_bbox_map[anc_idx] = box_idx
jaccard[:, box_idx] = col_discard # 去除所在行和所在列
jaccard[anc_idx, :] = row_discard
return anchors_bbox_map二、标记类别和偏移量
偏移量转换
偏移量按照理解是anchor相对于gt的偏移程度(也就是不准确的程度),可以表示成向量(中心x轴偏移程度,中心y轴偏移程度,宽度偏移程度,高度偏移程度),这里也可以看出这就是我们得到每一个anchor的后4个指标的变换。
在d2l中采用如下的方式来定义偏移量,并按照一般情况设定参数值:

相对应的代码实现如下:
def offset_boxes(anchors, assigned_bb, eps=1e-6):
"""对锚框偏移量的转换"""
c_anc = d2l.box_corner_to_center(anchors) # d2l库中的函数,将对角坐标表示转换为中心点坐标表示
c_assigned_bb = d2l.box_corner_to_center(assigned_bb)
offset_xy = 10 * (c_assigned_bb[:, :2] - c_anc[:, :2]) / c_anc[:, 2:] # 求偏移量前两项
offset_wh = 5 * torch.log(eps + c_assigned_bb[:, 2:] / c_anc[:, 2:]) # 求偏移量后两项
offset = torch.cat([offset_xy, offset_wh], axis=1) # 按照列拼接,组成4维的偏移向量
return offset标记类别
anchor在被分配了gt后同时也有了gt的类别(正例,labels);没有被分配到的anchor被标记为background(负例)。在这里采用background=0,每个类别依次累加1得到类被的索引和分配。
#@save
def multibox_target(anchors, labels):
"""使用真实边界框标记锚框"""
batch_size, anchors = labels.shape[0], anchors.squeeze(0) # label=(batch_size, number, 4)
batch_offset, batch_mask, batch_class_labels = [], [], []
device, num_anchors = anchors.device, anchors.shape[0]
# 分配gt到anchor
for i in range(batch_size):
label = labels[i, :, :]
anchors_bbox_map = assign_anchor_to_bbox(
label[:, 1:], anchors, device)
bbox_mask = ((anchors_bbox_map >= 0).float().unsqueeze(-1)).repeat(
1, 4)
# 将类标签和分配的边界框坐标初始化为零
class_labels = torch.zeros(num_anchors, dtype=torch.long,
device=device)
assigned_bb = torch.zeros((num_anchors, 4), dtype=torch.float32,
device=device)
# 使用真实边界框来标记锚框的类别。
# 如果一个锚框没有被分配,标记其为背景(值为零)
indices_true = torch.nonzero(anchors_bbox_map >= 0)
bb_idx = anchors_bbox_map[indices_true]
class_labels[indices_true] = label[bb_idx, 0].long() + 1
assigned_bb[indices_true] = label[bb_idx, 1:]
# 偏移量转换
offset = offset_boxes(anchors, assigned_bb) * bbox_mask
batch_offset.append(offset.reshape(-1))
batch_mask.append(bbox_mask.reshape(-1))
batch_class_labels.append(class_labels)
bbox_offset = torch.stack(batch_offset)
bbox_mask = torch.stack(batch_mask)
class_labels = torch.stack(batch_class_labels)
return (bbox_offset, bbox_mask, class_labels)以上即可完成对于偏移量和label的分配。同时,李沐老师还在课程中加入了一个例子来实现以上代码:13.4. 锚框 — 动手学深度学习 2.0.0 documentation (d2l.ai)
(不足之处,还请指出~)

















 2027
2027

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









