







✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,
代码获取、论文复现及科研仿真合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
更多Matlab完整代码及仿真定制内容点击👇
🔥 内容介绍
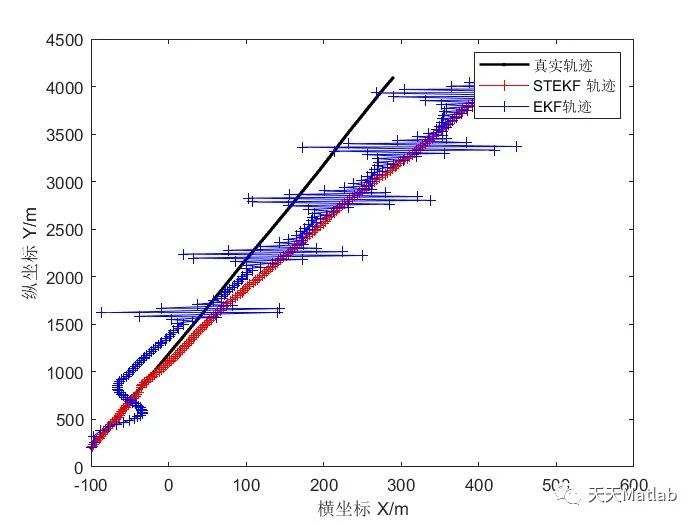
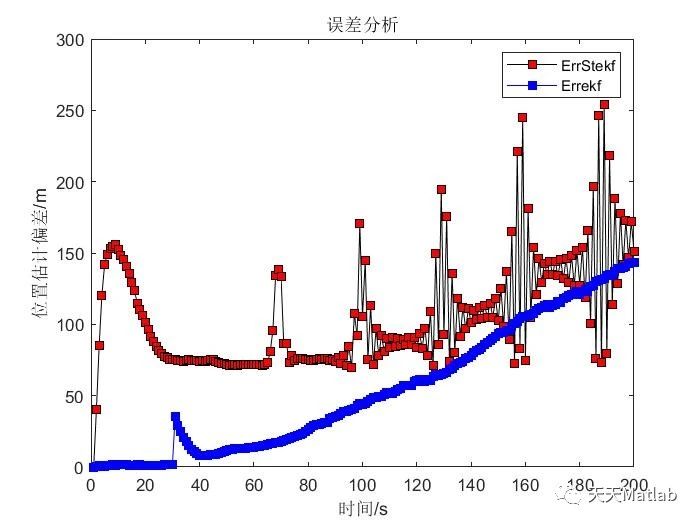
滤波跟踪是目标追踪领域中的重要技术之一,它通过对目标位置和速度进行估计和预测,从而实现对目标的跟踪和预测。在滤波跟踪中,卡尔曼滤波是最常用的方法之一,它通过对目标状态进行动态建模和不确定性的估计,实现对目标状态的最优估计和预测。在本文中,我们将介绍基于距离的强跟踪卡尔曼滤波(STEKF)和扩展卡尔曼滤波(EKF)在目标追踪中的应用和实现。
首先,让我们来了解一下基于距离的强跟踪卡尔曼滤波(STEKF)的原理和实现。STEKF是一种基于距离测量的目标追踪方法,它通过对目标位置和速度的估计和预测,结合距离测量的信息,实现对目标的跟踪和预测。STEKF的核心思想是将距离测量信息融合到卡尔曼滤波中,从而提高对目标状态的估计精度和跟踪性能。在实际应用中,STEKF可以通过激光雷达、摄像头等传感器获取目标与追踪器之间的距离信息,然后利用这些距离信息对目标状态进行更新和修正,从而实现对目标的跟踪和预测。
另外,扩展卡尔曼滤波(EKF)也是一种常用的目标追踪方法,它通过对非线性系统进行线性化,从而实现对目标状态的估计和预测。在目标追踪中,由于目标运动和传感器测量通常是非线性的,因此EKF可以通过对非线性系统进行线性化,实现对目标状态的最优估计和预测。在实际应用中,EKF可以通过对目标运动模型和传感器测量模型进行线性化,然后利用这些线性化模型对目标状态进行更新和修正,从而实现对目标的跟踪和预测。
综上所述,基于距离的强跟踪卡尔曼滤波(STEKF)和扩展卡尔曼滤波(EKF)是目标追踪领域中常用的方法之一,它们通过对目标状态进行估计和预测,结合距禈测量信息和非线性系统的线性化,实现对目标的跟踪和预测。在实际应用中,我们可以根据具体的需求和场景选择合适的滤波跟踪方法,从而实现对目标的高效跟踪和预测。希望本文对您了解滤波跟踪方法有所帮助,谢谢阅读!
📣 部分代码
T=1/fs;%雷达扫描周期N=200/T;%总的采样次数X=zeros(4,N);%目标真实位置、速度X(:,1)=[-100,2,200,20];%目标初始位置、速度Z=zeros(1,N);%传感器对位置的观测delta_w=1e-3;%如果增大这个参数,目标真实轨迹就是曲线了Q=delta_w*diag([0.5,1]);%过程噪声方差G=[T^2/2,0;T,0;0,T^2/2;0,T];%过程噪声驱动矩阵R=5;%观测噪声方差F=[1,T,0,0;0,1,0,0;0,0,1,T;0,0,0,1];%状态转移矩阵x0=200;%观测站的位置,可以设为其他值y0=300;Xstation=[x0,y0];
⛳️ 运行结果
🔗 参考文献
[1] 詹建平,黄席樾,沈志熙,等.基于均值漂移和卡尔曼滤波的目标跟踪方法[J].重庆理工大学学报:自然科学, 2010(3):5.DOI:CNKI:SUN:CGGL.0.2010-03-018.
[2] Jian-Ping Z .基于均值漂移和卡尔曼滤波的目标跟踪方法[J].重庆理工大学学报(自然科学版), 2010(003):024.
[3] 叶斌,徐毓.强跟踪滤波器与卡尔曼滤波器对目标跟踪的比较[J].空军预警学院学报, 2002, 016(002):17-19,22.















 629
629











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









