




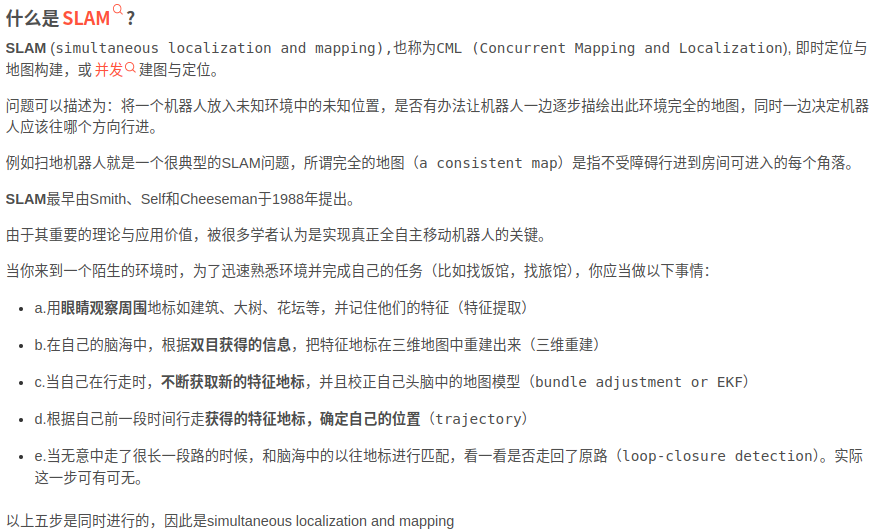
1. SLAM算法目的:机器人在没有先验知识的情况下,实时地构建周围环境的地图,并在地图上进行定位。相较于视觉SLAM,激光SLAM研究时间更久,在理论、技术和产品落地上更成熟。对机器人和自动驾驶企业来说,激光SLAM仍是目前最稳定、最主流的定位导航方法.
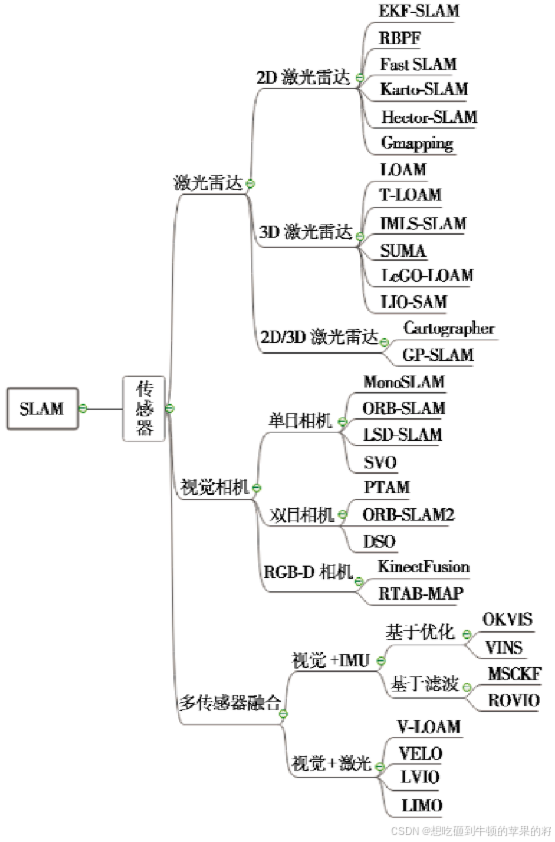
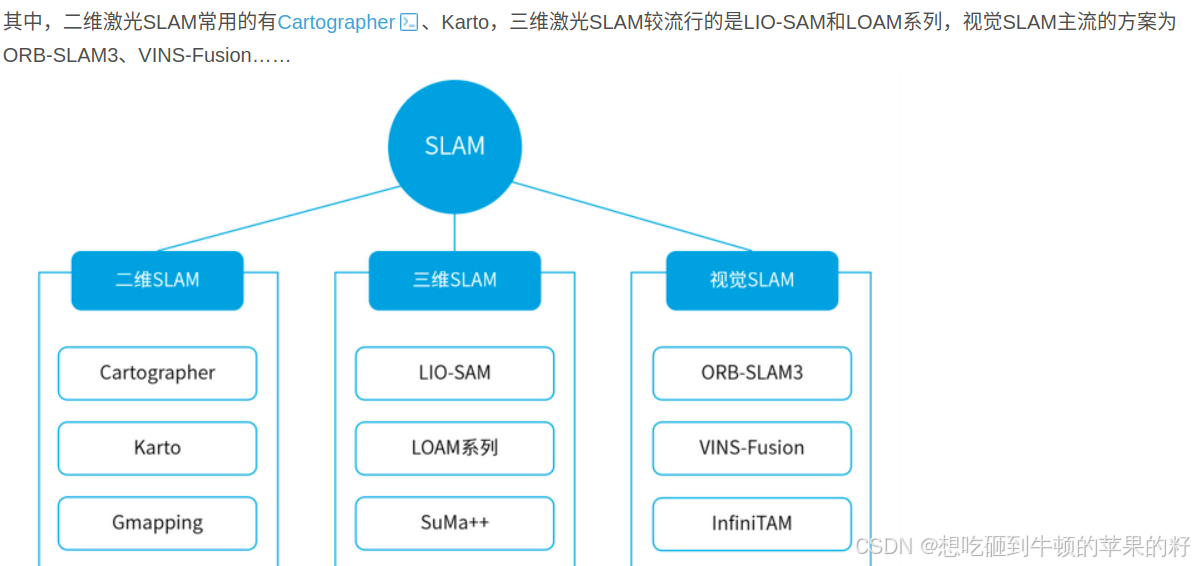
2. 算法分类
2.1

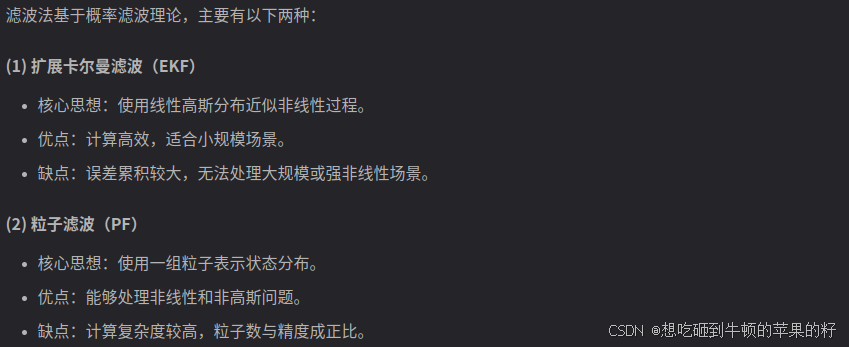
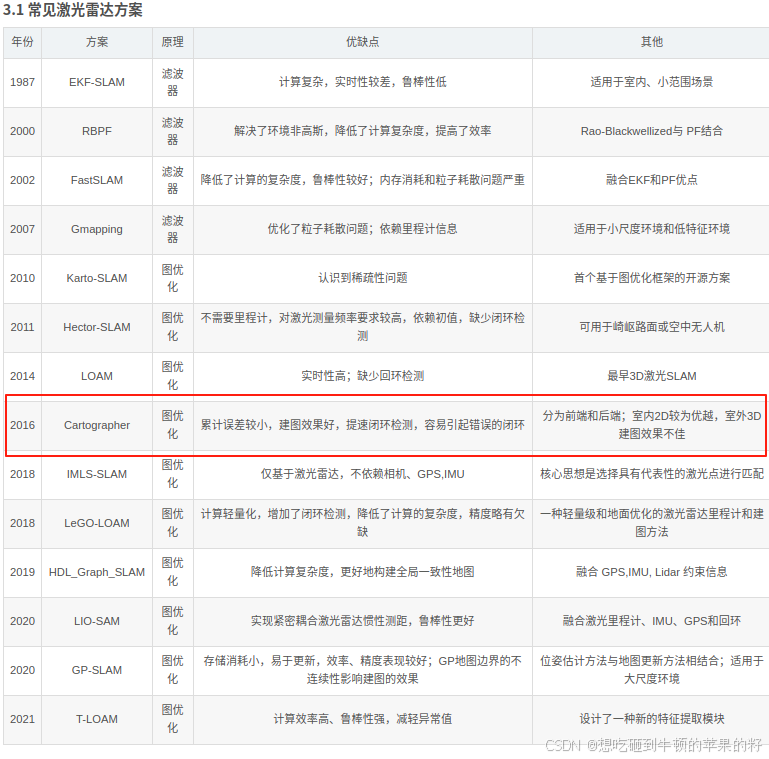
如:EKF-SLAM(1987)扩展卡尔曼滤波器(EKF)、FastSLAM(2002)粒子滤波器、
2.2

如:Karto
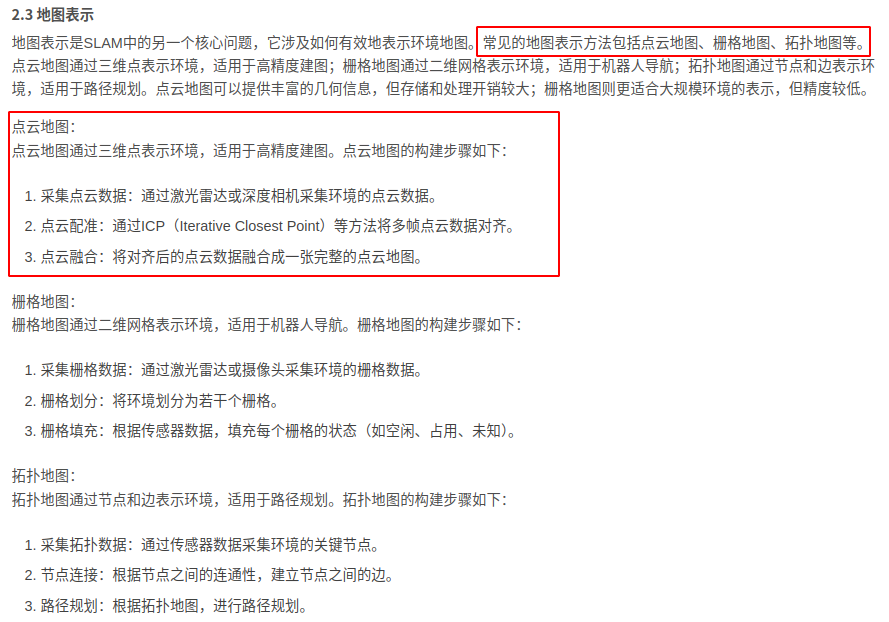
2.3

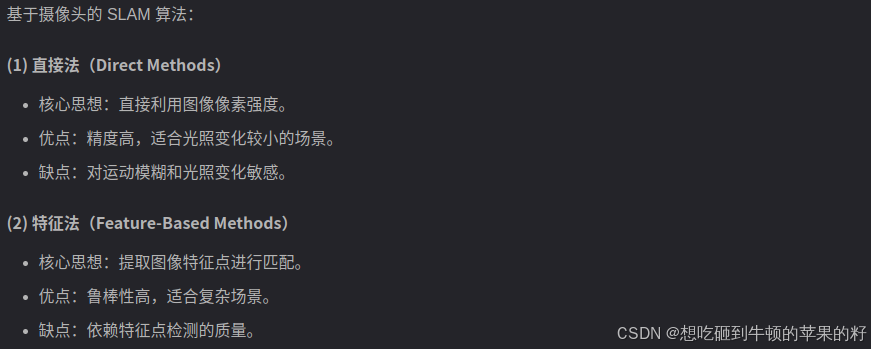
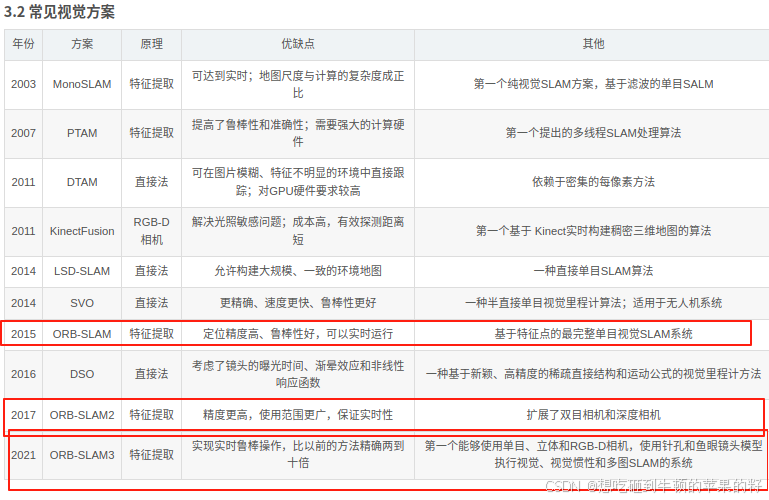
如:T-LOAM(2021)、ORB-SLAM3(2021经典)是一种基于特征点的视觉SLAM算法、DynaSLAM、LSD-SLAM(2014)、DSO(2016)、 VINS-Mono(2018)、SVO(2014)、Cartegrapher(2016经典)
激光雷达:
-
LOAM系列,包括LOAM、LOAM-Velodyne、LOAM-LiDAR等
-
LIO-SAM(经典)
3. 技术流程


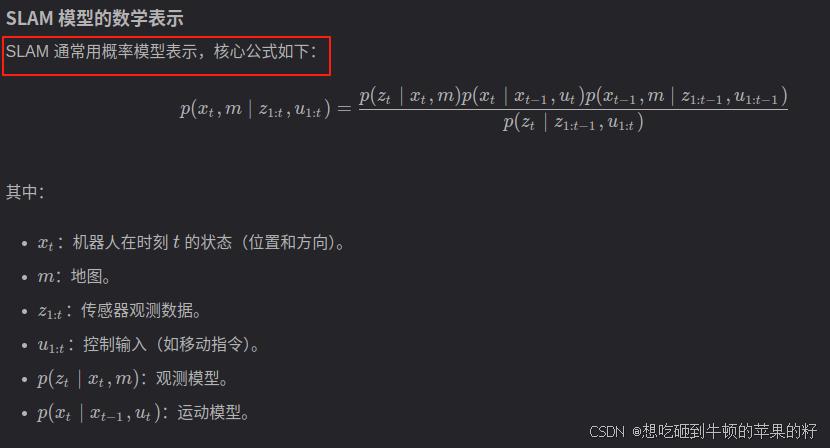
4. SLAM 模型的数学表示
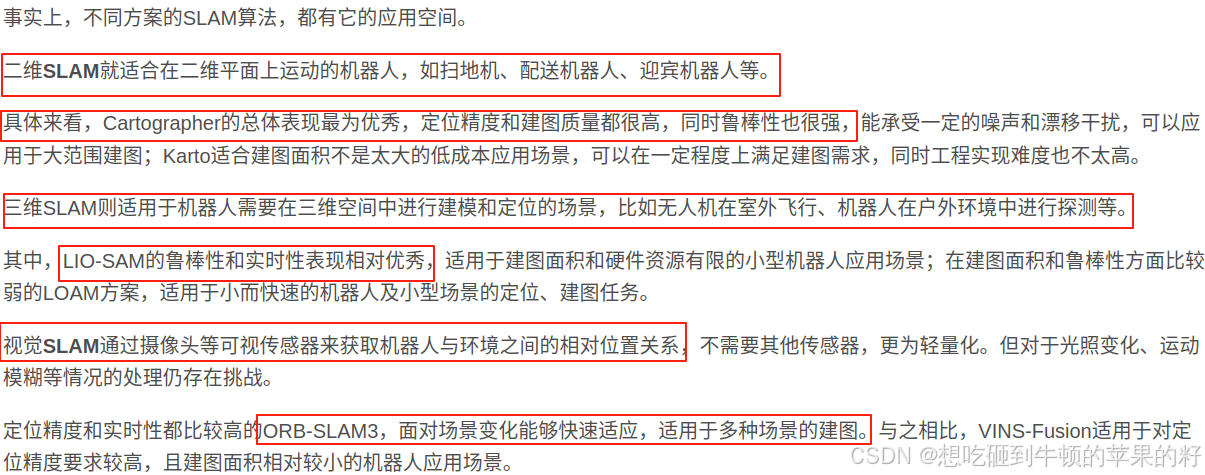
5.应用:

6.方案选择
参考:
SLAM 模型与算法概述_slam算法-CSDN博客、SLAM技术详解及Python实现_slam算法-CSDN博客
一文彻底搞懂SLAM技术

















 1032
1032

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









