







论文信息
题目:
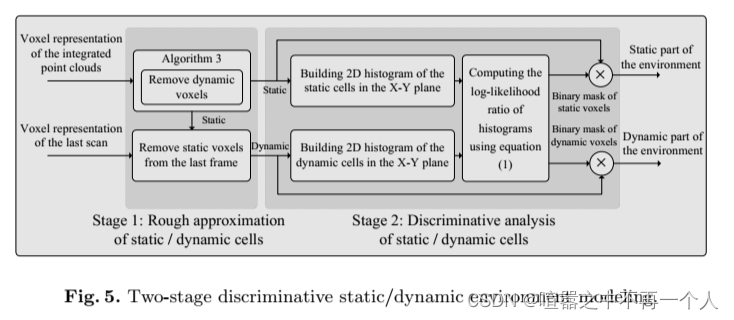
Two-Stage Static/Dynamic Environment Modeling Using Voxel Representation
两阶段静态/动态环境建模:使用体素表示
论文地址:
https://www.researchgate.net/profile/Alireza-Asvadi/publication/305279074_Two-Stage_StaticDynamic_Environment_Modeling_Using_Voxel_Representation/links/600bff7f45851553a063974a/Two-Stage-Static-Dynamic-Environment-Modeling-Using-Voxel-Representation.pdf
发表期刊:
Robot 2015: Second Iberian Robotics Conference
标签
激光雷达、动态物体检测、体素网格地图
摘要
本文介绍了一种用于车辆周围静态/动态建模的方法。该方法包括两个主要模块:(i)使用分段面拟合算法估计地面表面的模块,和(ii)使用判别分析的基于体素的车辆周围环境的静态/动态模型。该方法使用KITTI数据集进行评估,实验结果表明了该方法的适用性。本文的主要目的是提高智能车辆对于周围环境感知的能力,以提高车辆在实际环境中的操作性能。
本文提出了一种基于体素的动态/静态三维环境表示方法,用于描述搭载Velodyne Lidar和惯性导航系统(GPS / IMU)的移动车辆周围的环境。本文的主要贡献包括:1)分段曲面拟合方法用于地面估计和物体/地面分离;2)基于体素的判别式静态/动态环境建模。提出的方法的输出是车辆周围环境的体素表示,其中体素被分类为静态或动态
内容简介
这篇论文的题目是《使用体素表示的两阶段静态/动态环境建模》(Two-Stage Static/Dynamic Environment Modeling Using Voxel Representation)。它是一篇关于智能车辆中3D环境建模与障碍物检测的研究论文。文章提出了一种基于体素表示的两阶段静态/动态环境建模方法,可以实时地对环境进行建模和障碍物检测。论文利用激光雷达和惯性导航系统采集的数据,提出了一种新的地面估计方法,并使用基于体素的障碍物表示方法来检测移动和静态障碍物。该方法能够高效准确地检测到道路上的障碍物,包括车辆、行人和其他的物体,为智能车辆在动态环境下的行驶提供了有力的支持
评价
本文算法在KITTI数据集[10]上进行了测试。目前,该算法实现在MATLAB平台上。由于动态/静态环境建模或运动检测任务的真实数据集还不可用,因此我们进行了定性评估。在接下来的章节中,我们将描述数据集并展示实验结果。















 2645
2645











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









