







论文信息
题目:
A General Framework for Lifelong Localization and Mapping in Changing Environment
论文地址:
https://arxiv.org/pdf/2111.10946.pdf
发表期刊:
2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
标签
长期地图构建
摘要
大多数现实场景(如商场和超市)的环境都会不断变化。一个预先构建的地图如果没有考虑到这些变化就很容易变得过时。因此,需要一个最新的环境模型来促进机器人的长期运行。为此,本文提出了一个通用的终身同时定位与建图(SLAM)框架。我们的框架使用多个会话地图表示,并利用高效的地图更新策略,包括地图构建、姿态图优化和稀疏化。为了减少内存使用量的不断增加,我们提出了一种基于Chow-Liu最大互信息生成树的地图修剪方法。我们的SLAM框架已经在真实的超市环境中部署了一个月,并进行了全面的验证。此外,我们发布了在室内和室外变化环境下收集的数据集,希望加速社区中的终身SLAM研究。我们的数据集可在 https://github.com/sanduan168/lifelong-SLAM-dataset 上获取。
为了应对环境变化,我们在前端和后端模块之上引入了一个地图更新模块。这个地图更新模块执行以下操作:
•收集传感器数据并记录动态场景,同时进行定位。
•检测旧地图和实时更新地图之间的差异。
•使用实时更新的地图修剪旧地图,从而以高效的恒定计算复杂度跟上环境变化的步伐。
本文提出了一种用于生命周期定位和建图的通用框架,能够跟踪场景中的变化并维护最新的地图,以实现精确和强健的定位估计。我们在真实商用机器人上进行了测试,这些机器人在超市环境中连续运行了一个多月。实验结果表明,我们的方法能够在存在显著环境变化的情况下实现准确和强健的定位。我们的主要贡献如下:
一种完整的通用框架,可在不断变化的环境中有效地操作。
基于子图的图稀疏化方法,具有恒定的计算和内存复杂度,能够实现高精度。
提供了一组公开的在变化环境中采集的激光雷达、IMU和轮式编码器数据,用于生命周期SLAM。
内容简介
一个通用的框架用于在不断变化的环境中的终身定位和建图
该论文介绍了一个通用框架,可用于实现在不断变化的环境中的终身定位和建图。该框架结合了概率机器人学中的概率图模型和机器学习中的深度学习技术。通过使用这个框架,机器人可以在不断变化的环境中进行准确的定位和建图,而不需要人工干预。
论文中的方法利用概率图模型和深度学习技术,将机器人的感知信息与历史信息相结合,建立起一个完整的地图,并对机器人当前位置进行估计。该框架不仅可以用于室内环境的建图,还可以用于室外环境的建图,并且可以在机器人行动时不断更新地图,实现终身定位和建图的功能。
论文还讨论了该框架在不同应用场景下的应用。例如,在室内环境中,机器人可以在建立地图的同时进行人员跟踪和环境监测;在室外环境中,机器人可以进行道路监测和障碍物识别。通过使用该框架,机器人可以在不同环境中进行定位和建图,实现更加智能化的行动。
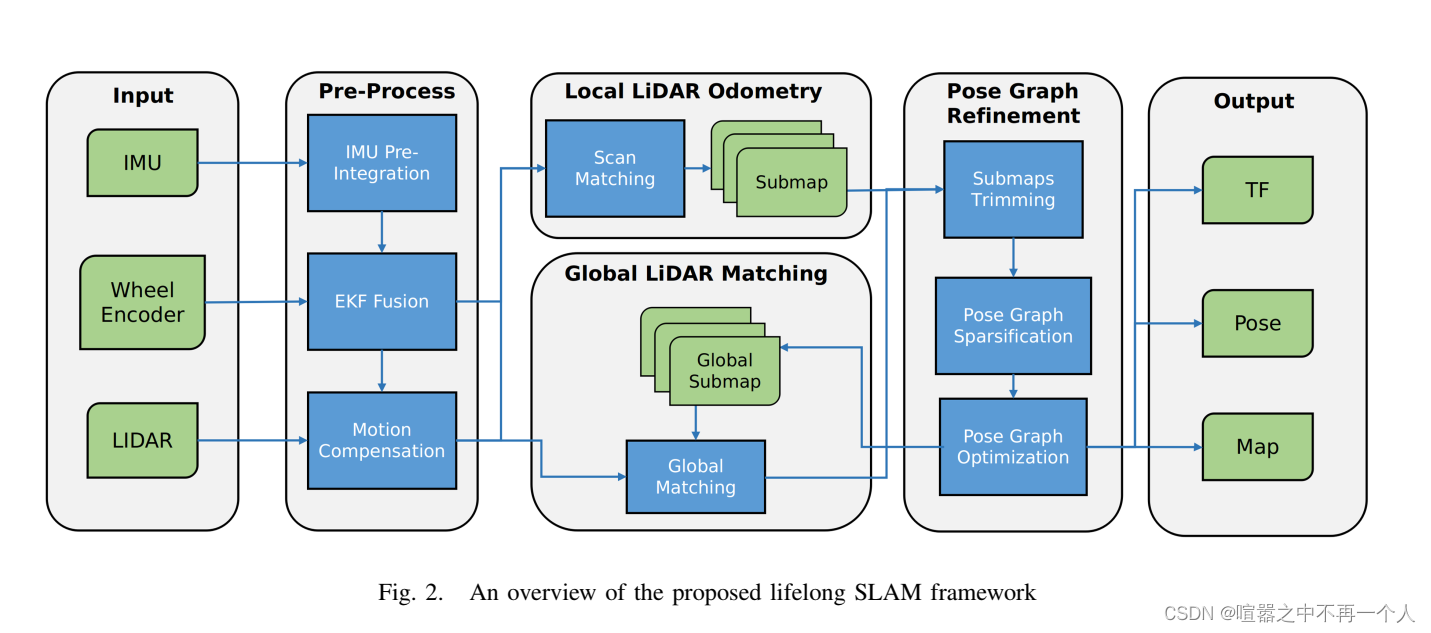
这一部分描述了我们提出的框架的体系结构,如图所示。我们的系统由三个子系统组成:本地LiDAR里程计(LLO),全局LiDAR匹配(GLM)和位姿图优化(PGR)。LLO的作用与[2]相同:构建一系列局部一致的子地图。GLM子系统负责计算传入扫描与全局子地图之间的相对约束,并将子地图和约束插入PGR中。PGR是我们系统中最重要的部分。它从LLO收集子地图和从GLM收集约束,修剪保存在旧会话中的旧子地图,并执行位姿图稀疏化和优化
评价
。然而,我们的方法目前还没有考虑到环境的意外剧烈变化。这种变化可能会导致定位漂移,因为入射扫描和地图之间没有有效的约束测量。在未来,我们计划探索更加稳健的定位算法以解决这个问题。















 2822
2822











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









