







论文信息
题目:
A real-time semantic visual SLAM for dynamic environment based on deep learning and dynamic probabilistic propagation
基于深度学习和动态概率传播的动态环境的实时语义视觉SLAM
论文地址:
https://link.springer.com/article/10.1007/s40747-023-01031-5
发表期刊:
Complex & Intelligent Systems (2023)
标签
语义SLAM、多线程、实时语义分割、静态特征点提取
摘要
现有的视觉同步定位与映射(SLAM)算法大多依赖于静态世界假设。结合深度学习,语义SLAM已经成为动态场景的流行解决方案。然而,大多数语义SLAM方法在处理动态场景时实时性较差。针对这一问题,本文提出了一种结合知识蒸馏和动态概率传播策略的实时语义SLAM方法。首先,为了提高执行速度,采用多级知识蒸馏的方法获得轻量级的分割模型,更适合连续帧创建独立的语义分割线程。这个分割线程只接受关键帧作为输入,这样系统就可以避免处理每一帧造成的时间延迟。其次,在分割结果的基础上,提出了静态语义关键帧选择策略。这样,就会选择那些包含更多静态信息的关键帧,减少动态对象的参与。通过将分割结果与数据匹配算法相结合,系统可以实现动态概率的更新和传播,减少动态点对姿态优化过程的影响。基于KITTI和TUM数据集的验证结果表明,该方法能够有效处理动态特征点,同时提高运行速度。
内容简介
我们提出了一种基于知识分解和动态概率传播的实时语义SLAM方法。本文的主要贡献如下:(1)在我们的SLAM系统中部署了基于多层次知识蒸馏训练的轻量级分割模型,在保证分割精度的同时提高了图像分割速度。(2)利用动态概率来区分特征点的属性。利用关键帧语义分割结果和数据匹配算法实现动态概率的更新和传播。(3)提出一种静态语义关键帧选择方法,减少动态地图点的比例,增加静态信息。(4)在姿态优化过程中引入动态概率,减少高动态概率地图点的影响。
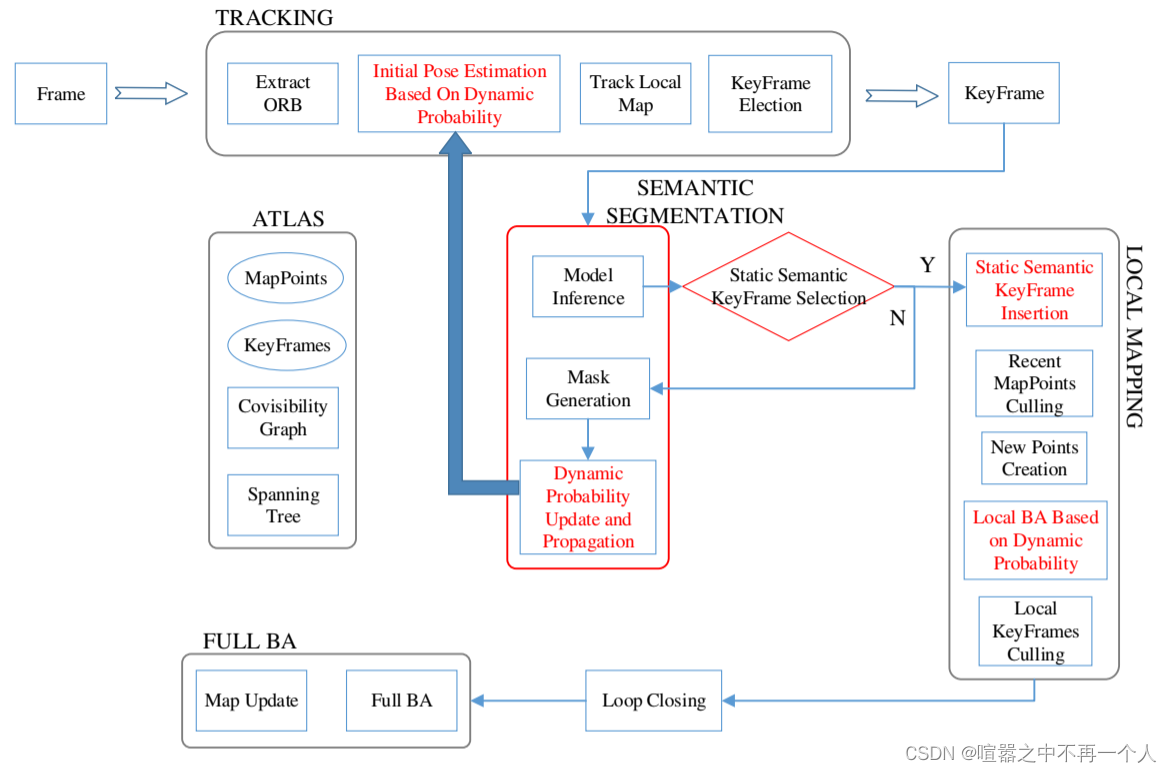
针对现有的动态场景语义SLAM方法速度不够快的问题,提出了一种基于动态概率优化和知识蒸馏的实时语义SLAM系统。以ORB-SLAM3为骨干,从模型轻量化、关键帧分割策略、多线程并行度等方面提高SLAM系统的整体执行速度。在动态处理方面,我们依靠概率来区分提取的特征点的属性。将关键帧分割结果与数据匹配算法相结合,实现动态概率的更新和传播。此外,我们还将动态概率与局部BA相结合,对摄像机姿态进行优化。基于开放数据集的实验结果表明,该方法能够有效地处理动态场景,同时提高语义SLAM系统的执行速度。
评价
与DynaSLAM相比,我们的方法能够在精度和处理速度之间建立更好的平衡,更适合实际应用。与Dyn ORB-SLAM相比,该方法平均跟踪时间短,运行速度快。该方法的静态语义关键帧选择和动态概率更新耗时较短。















 1247
1247











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









