







 RDS-SLAM是一种基于ORB-SLAM3的改进算法,设计了语义线程和优化线程以并行处理,实现在动态环境中的实时鲁棒跟踪和建图。通过移动概率更新和语义信息传播,该方法能有效识别和处理动态物体,提高跟踪稳定性。相比其他方法,RDS-SLAM具有更好的实时性能。
RDS-SLAM是一种基于ORB-SLAM3的改进算法,设计了语义线程和优化线程以并行处理,实现在动态环境中的实时鲁棒跟踪和建图。通过移动概率更新和语义信息传播,该方法能有效识别和处理动态物体,提高跟踪稳定性。相比其他方法,RDS-SLAM具有更好的实时性能。
论文信息
题目:
RDS-SLAM:Real-Time Dynamic SLAM Using Semantic Segmentation Methods
RDS-SLAM:基于语义分割方法的实时动态SLAM
论文地址:
https://ieeexplore.ieee.org/stamp/stamp.jsp?arnumber=9318990
发表期刊:
IEEE Access ( Volume: 9)
开源代码
https://github.com/yubaoliu/RDS-SLAM.git
论文标签
摘要
在典型的视觉同时定位与地图构建(vSLAM)算法中,场景刚性是一个很强的假设。这种强大的假设限制了大多数vSLAM在动态现实环境中的使用,而动态现实环境是增强现实、语义地图、无人驾驶汽车和服务机器人等几个相关应用的目标。人们提出了许多解决方案,使用不同类型的语义分割方法(例如Mask R-CNN,SegNet)来检测动态对象并删除异常值。然而,据我们所知,这类方法在其体系结构中需要在跟踪线程中等待语义结果,并且处理时间依赖于所使用的分割方法。本文提出了RDS-SLAM,一种基于ORB-SLAM3的实时视觉动态SLAM算法,增加了一个语义线程和一个基于语义的优化线程,用于在动态环境中实时鲁棒跟踪和建图。这些新线程与其他线程并行运行,因此跟踪线程不再需要等待语义信息。此外,本文还提出了一种算法来获取尽可能最新的语义信息,从而使不同速度的分割方法能够以统一的方式使用。我们使用移动概率更新和传播语义信息,将其保存在地图中,并使用数据关联算法从跟踪中删除异常值。
内容简介
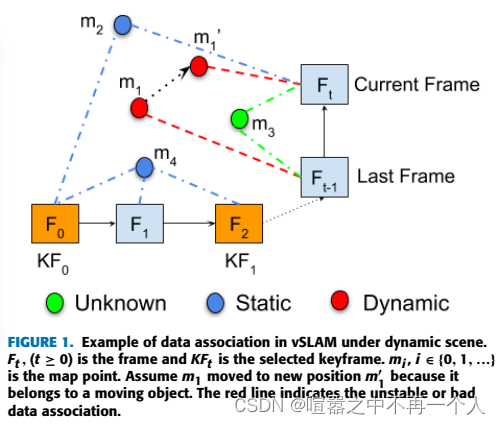
由于语义线程与跟踪线程并行运行,我们使用映射点来保存和共享语义信息。如图1所示,我们利用移动概率更新和传播语义信息,并根据移动概率阈值将地图点分为静态、动态和未知三类。这些分类的地图点将用于在跟踪中选择尽可能稳定的数据关联。本文的主要贡献包括:
(1)提出了一种新的基于语义的实时动态vSLAM算法RDS-SLAM,使得跟踪线程不再需要等待语义结果。
(2)提出了一种关键帧选择策略,将尽可能最新的语义信息作为去除异常值的关键帧,以一种统一的方式与任何不同速度的语义分割方法进行对比。
(3)实验结果表明,所提方法的实时性优于现有的使用TUM的同类方法数据集。
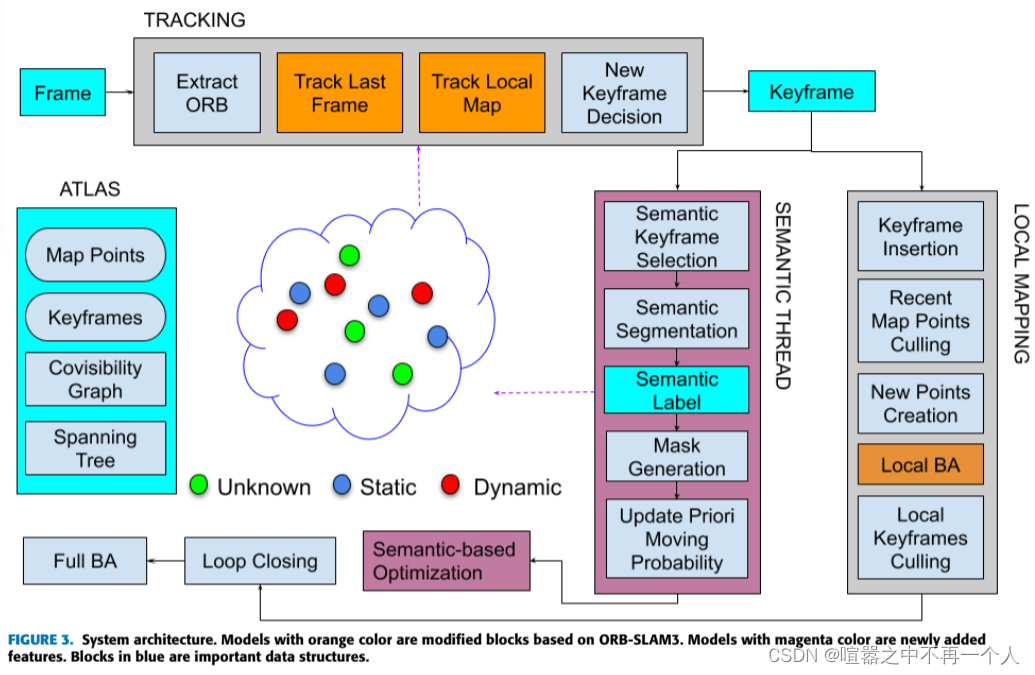
每一帧都将首先通过跟踪线程。在上一帧跟踪后估计当前帧相机的初始姿态,并通过局部地图跟踪进一步优化。然后选取关键帧用于语义跟踪、语义优化和局部线程映射;在跟踪和局部映射线程中修改多个模型,利用语义信息去除摄像机自运动估计中的异常值。在跟踪线程中,提出了一种数据关联算法,尽可能地利用静态对象的特征。语义线程与其他语义线程并行运行,从而不阻塞跟踪线程,将语义信息保存到图谱中。利用语义标签生成先验动态对象的掩码图像;利用语义信息更新与关键帧中特征点匹配的地图点移动概率;最后,利用图谱中的语义信息对相机位姿进行优化。
评价
提出了一种基于RGB-D相机的动态环境下基于语义的实时视觉SLAM (RDS-SLAM)系统。对ORB-SLAM3进行了改进,增加了语义跟踪线程和语义优化线程,利用语义信息消除动态对象的影响。这些新线程与跟踪线程并行运行,因此,跟踪线程不会因为等待语义信息而阻塞。提出了一种语义分割关键帧选择策略,以获取尽可能最新的语义信息,以应对不同速度的分割方法。我们使用移动概率更新和传播语义信息,使用数据关联算法检测和删除跟踪中的异常值。使用TUM数据集评估了算法的跟踪性能和处理时间。与主流vslam算法的对比实验表明,该算法具有良好的跟踪性能,能够实时地跟踪每一帧图像。该系统的最快速度约为30HZ,与ORB-SLAM3的跟踪速度相近。在未来的工作中,我们将尝试1)在真实的机器人上部署该系统,2)将该系统扩展到立体相机和单相机系统,以及3)构建语义地图
阅读总结
文章解决的问题如下:
1、ORB-SLAM3不能解决动态场景的问题
2、大多数动态SLAM实时性不够的问题
文章提出的解决方法如下:
1、改进ORB-SLAM3增加语义分割的功能
2、提出语义线程和跟踪线程并行的策略(非阻塞模型)
总的来说,该文章的工作量比较大,介绍得比较仔细,值得借鉴和引用。其中的利用移动概率传播来剔除动态特征点的方法还没研究

















 2140
2140

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









