







实验四:基于扩展卡尔曼滤波器的机器人定位
实验介绍:
机器人定位是一项极其重要的任务,其目的在于实时计算机器人所在的位置和方向。上一个实验演示了如何获取扫描测距仪感知的线性结构的更抽象表示。本次实验将以实验三为基础,给定线性特征地图,对机器人实现根据其感知的线性结构来定位自身。
部分实验报告文字及截图:🍕🍕🎂👿👿🍕🐂🐂🙌🙌🍬🍬🐧😸❤️❤️❤️❤️
任务:推导状态转移函数相对于状态和控制输人的雅可比函数F和Fu,并在transition-Function.m 中编程实现。
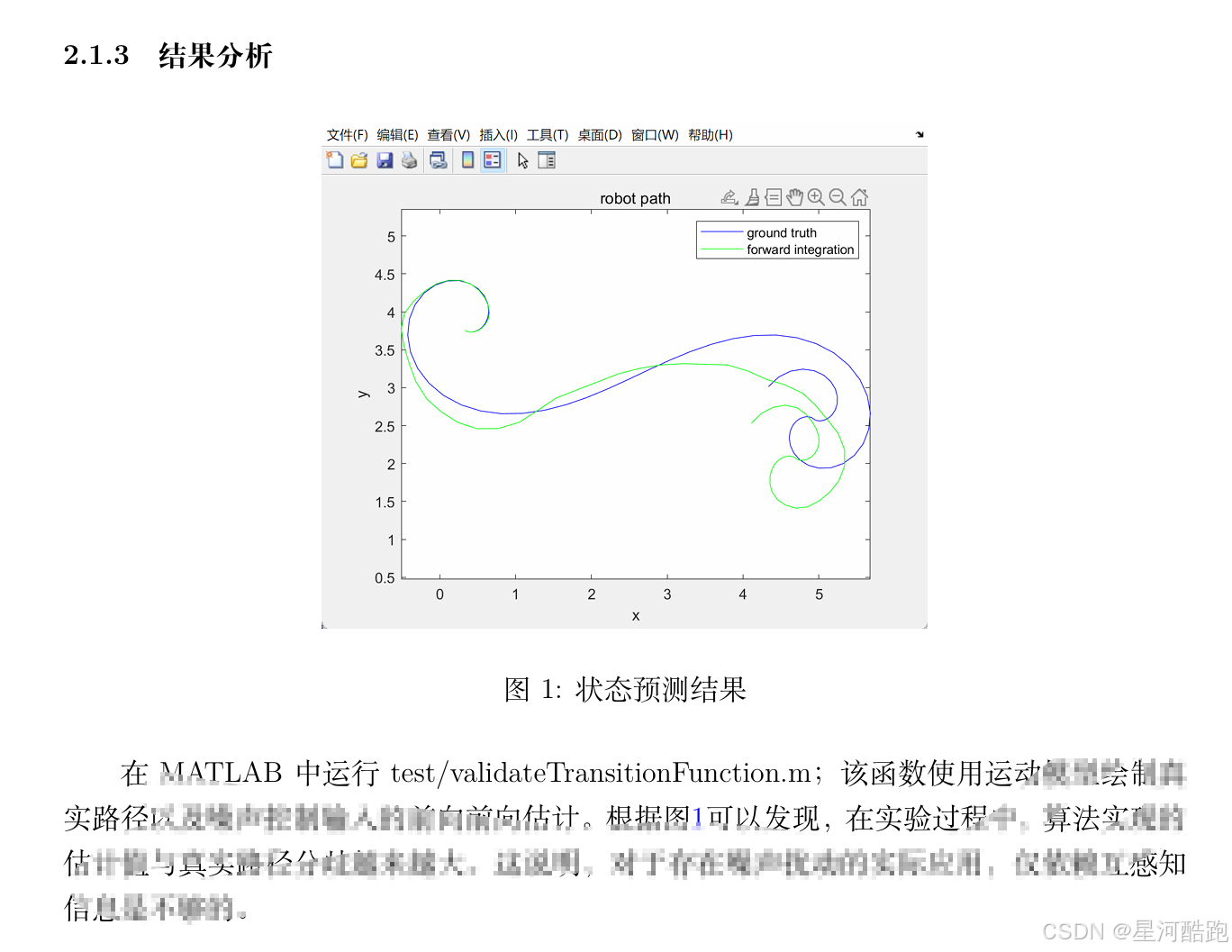
验证:在 MATLAB 中运行 test/validateTransitionFunction.m,此函数使用一系列控制输入,通过提供的运动模型前向估计状态。如果实现正确,该函数将使用运动模型绘制真实路径以及噪声控制输入的前向前向估计。可以发现,在实验过程中,算法实现的估计值与真实路径分歧越来越大。这说明,对于存在噪声扰动的实际应用,仅依赖互感知信息是不够的。
关键点:这个任务的关键点在于理解和实现扩展卡尔曼滤波器(EKF)的预测步骤,特别是状态预测和状态协方差的先验估计。常见的优化方法,被广泛应用于各种拟合和优化问题中。
思路:
1.理解状态预测:状态预测是基于上一状态和控制输人来预测当前状态。这涉及到运
实验报告中的部分截图:
在进行机器人定位的实验过程中,我深刻体会到了定位技术在机器人领域的关键性作用。这次实验以卡尔曼滤波为基础,通过状态预测、测量关联和状态更新等步骤,实现了对机器人在给定线性特征地图下的精确定位。通过这个过程,我积累了一些有关机器人定位的宝贵经验。
首先,状态预测阶段的理解和实现是整个定位过程的基石。在推导状态转移函数相对于状态和控制输入的雅可比矩阵时,我深刻领悟到了运动模型对机器人位置估计的重要性。通过合理建模运动噪声,我们能更好地逼近机器人在运动过程中的真实状态,这对于提高定位的准确性至关重要。在此过程中,使用符号计算工具是解决复杂数学计算的得力助手。
实验报告全部采用overleaf撰写。非常具有美观性。并且在期末取得了98的高分。
🐧🐧🍬🍬🍬🍬🍕🍕👿🍕🐏🐏🐏🦞🦞❤️👿👿😸😸🎂🐂🐂🙌🙌🍕🍕👿👿🎂🍕
实验4:机器人学导论实验4: 基于扩展卡尔曼滤波器的机器人定位
实验6:机器人学导论-基于扩展卡尔曼滤波的SLAM技术原理报告
实验8:机器人学导论期末复习-帮你总结



















 512
512

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











