








 超级会员免费看
超级会员免费看

论文地址:Excellent-Paper-For-Daily-Reading/application/centerline at main
类别:应用——中心线提取
时间:2023/11/05
摘要
针对复杂物体动态三维测量中条纹图像过曝光、欠曝光以及环境光照干扰引起激光中心线提取速度慢、提取 不准确的问题,提出一种基于深度学习语义分割技术的光条中心线提取方法,该方法使用改进的 UNet++模型进行图像分割,粗提光条中心区域,得到1~2个像素宽度的光条中心线,再利用灰度重心法精确提取亚像素中心。经实验证明,该方法能够有效克服因光条图像曝光不均以及外部干扰噪声带来的不良影响,准确、快速地提取出了复杂物体完整、光滑的亚像素光条中心线,满足工业中动态三维测量的要求。
实验
实验流程
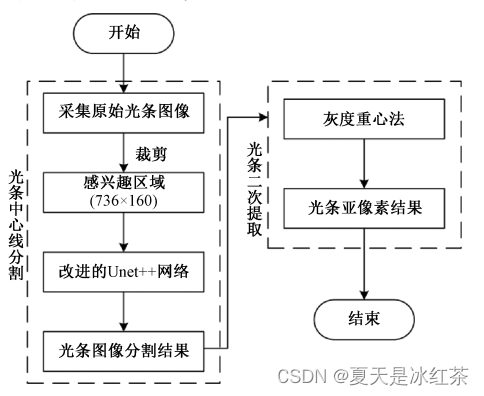
光条中心线提取流程
第一阶段
采集原始激光条图像,然后对每幅图像进行裁剪选取感兴趣区域,经过裁剪后光条图像的大小为736×160像素,最后使用改进的 UNet++模型对裁剪后的光条图像进行分割。该阶段输出的中心线分割结果将直接运用于第二阶段的光条二次提取任务。
第二阶段
使用灰度重心法对光条分割图像进行亚像素提取。
论文提出改进的Unet++网络

在特征融合前引入了通道注意力机制,在通道数上抑制特征融合时产生的干扰噪声,如图 4 所示为 本文引入的 ECANet 网络结构,ECANet是一种极为轻量化的注意力机制,该模型复杂度小,提升效果显著。
并且在网络中添加了残差结构,对输入特征层进行 1×1 卷积进行通道数调整,再经过 ReLU 激活函数,最后与普通卷积后的结果进行相加得到输出特征层。
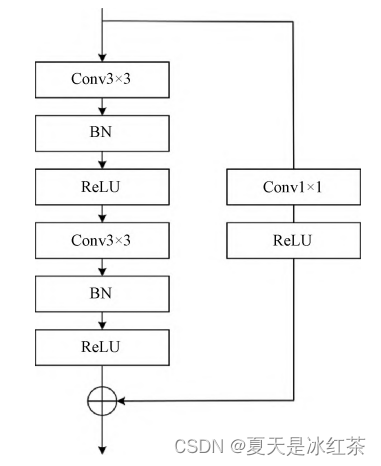
改进卷积单元
评价指标
首先采集10幅激光光条与棋盘格标定板行角点重合的条纹图像,利用 Matlab中的相机标定工具确定棋盘格角点的图像坐标,然后提取激光条纹的中心坐标,最后对提取的光条中心坐标与棋盘格角点基础坐标求距离均值,将所得的结果作为光条中心的提取误差,以此来评价光条中心线的提取精度。 其中距离均值的定义如下:

式中:n表示光条纹与棋盘格角点重合的数量,表示棋盘格角点的基准坐标,
表示光条纹的中心坐标。该值越小,说明光条中心线提取越准确。
总结
本文针对复杂表面物体动态三维测量中光条图像过曝光、欠曝光以及环境光照干扰造成光条中心线提取速度慢、提取精度低的问题,提出了一种快速、准确的激光中心线提取方法。通过改进 UNet++模型将光条图像分割为 1~2 像素宽度,再对细化后的条纹图像利用灰度重心法实现对激光中心线的准确提取。
















 1918
1918











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











