







后面的所有讲解都会直接引出概念、定义之类的,若实在有比较难理解的地方会由示例引出。
1.针孔模型
大家在中学都已经学习过了小孔成像的相关知识,那星主在这里帮大家回顾一下。
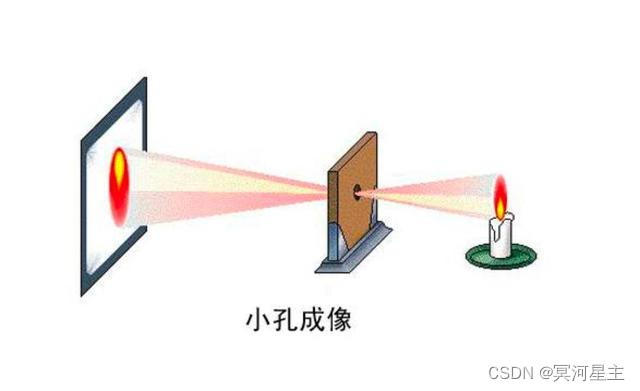
图1 小孔成像
大家看图1,一根蜡烛经过一个小孔后在一个平面上留下了一个像。那为什么会造成这种现象呢?其实原理很简单,就是光在均匀介质中沿着直线传播。其实小孔成像模型就是我们现代摄像机的基本成像模型。
细心的读者会发现,这不对啊,摄像机拍出来的照片是正的,而上面的像是倒立翻转的。那么请大家想一下,如果我们把上面的像移动到小孔与蜡烛之间,且和小孔之间的距离与倒立翻转的像到小孔之间的距离相等时,这个像就正立过来了(如果还是不能理解,可以看看图2)。大家对小孔模型有了直观了解后,我们来探讨一下它的数学模型。
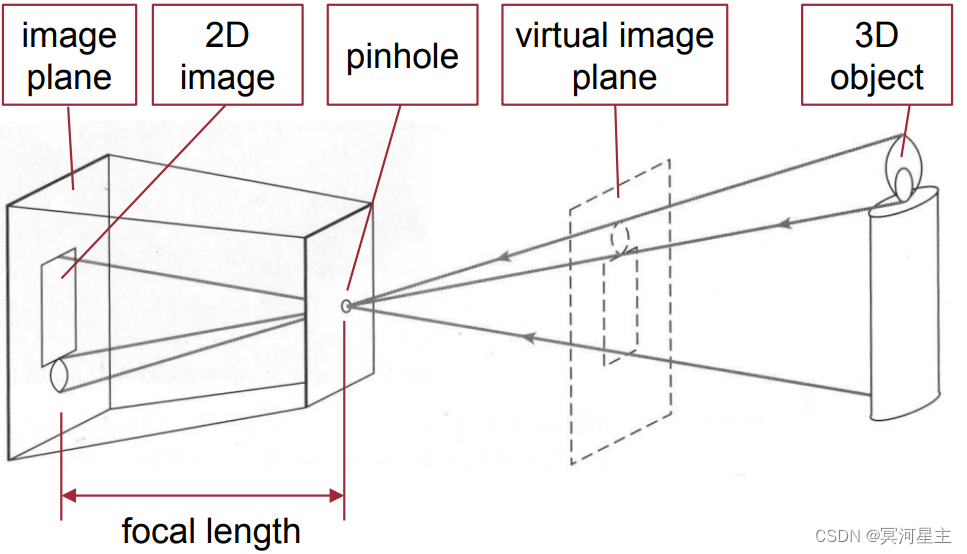
图2 小孔成像

图3 针孔摄像机成像的几何模型
我们先来了解一些专业名词。针孔所在的平面我们叫做摄像机平面,建立图3所示的摄像机坐标系;而形成倒立翻转的像的平面叫做成像平面;针孔到成像平面的距离称为摄像机的焦距,记为
。在实际的三维空间中,有一
点,坐标为
。
点所成的像为
点,坐标为
。
我们先对坐标系形成的平面进行讨论,此时
点和
点投影在此平面的坐标分别是
。由相似三角形可知,
(1)
对于平面,我们也可以得到这样的关系,
(2)
上述(1)(2)就组成了针孔摄像机最基本的模型。但注意,上述模型假设了针孔摄像机的光圈近似为几何空间上的一点,实际的光圈是有大小的。当针孔尺寸越大时,光圈越大,接受的光线越多,形成的像越亮,但此时的像是模糊的。反之,若光圈越小,接受的光线越少,形成的像越暗,但像是清晰的。那如何解决呢?
2.透镜成像
为了解决上面的问题,我们引入了凸透镜。凸透镜的光学原理是光的折射(如图4所示)。
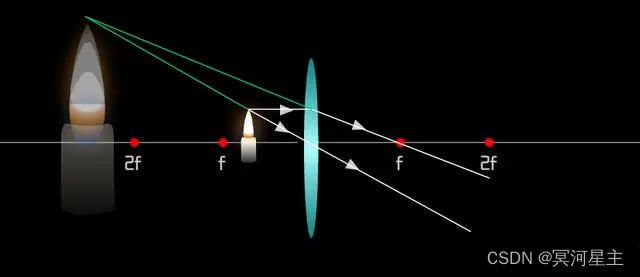
图4 凸透镜成像原理
图4的成像大家应该很熟悉了。接下来我们介绍几个概念。点处我们称为焦点,即凸透镜能把光线汇集到这一点。至于焦距大家应该很熟悉了。物体到透镜的距离称为物距,我们用字母
表示,成像平面到透镜的距离称为像距,我们用字母
表示。至于凸透镜的成像规律这里就不介绍了,因为基本用不到,感兴趣的读者可以百度一下。
如果我们要得到一个清晰的像,那我们的模型应该满足什么条件呢?

图5 凸透镜原理
所以,满足式子时,我们可以在成像平面上得到清晰的像。在这种情况下,物体上的点和成像平面上的点基本满足一一对应的关系。那透镜又是如何解决针孔摄像机光线问题的呢?
假设三维空间中存在一点,该点
可以发射出多条光线通过透镜汇聚到成像平面的同一点处,而针孔摄像机模型中,光线只能通过针孔的位置。
3.失焦和畸变
接下来简单介绍一下失焦和畸变,大家知道有这么一回事就行了。
与镜头距离不同的点发出的光线无法完全聚焦于胶片上,这部分图像就会失焦,即变“虚”(如下图6、图7所示)。所以透镜成像具有一定的距离限制,在该距离内物体可以在胶片上清晰成像,这个距离叫做景深。
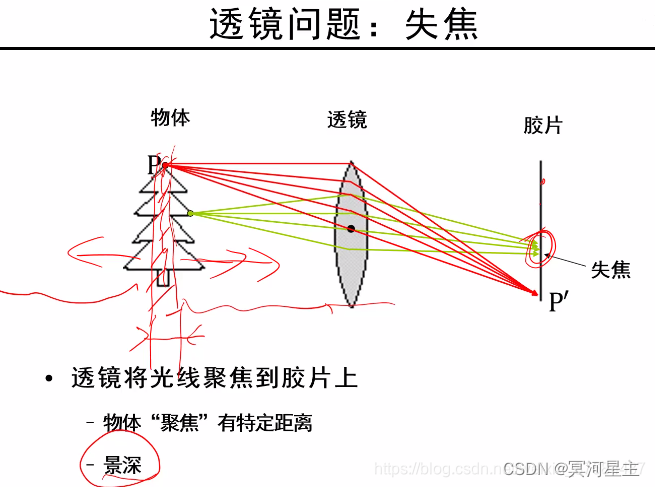
图6 失焦原理图

图7 凸透镜失焦直观示意图
畸变是指成像平面上的图像点在几何位置上出现了误差,使整个成像系统不再严格符合我们的摄像机成像模型。
畸变分为两种,一种是切向畸变,一种是径向畸变。在现代摄像机中,切向畸变的程度很少,可以忽略,我们主要关注的是径向畸变。这里大家先直观了解一下,后面我们会详细讨论径向畸变的数学模型。
径向畸变又可以分为枕形畸变和桶形畸变两种(图8)。
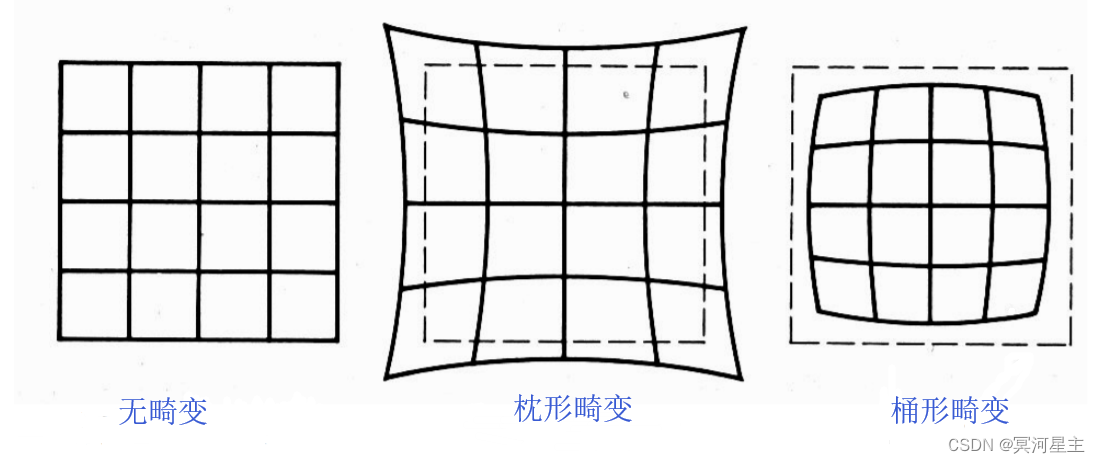
图8 径向畸变示意图
好了,关于针孔模型的相关知识就介绍到这里,欢迎大家指出文章的不足之处。

















 3154
3154

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









