






 本文介绍了超前和滞后补偿器在控制系统中的作用。超前补偿器旨在提升系统稳定性,加快收敛速度,通过调整传递函数参数使闭环根轨迹向左移动。滞后补偿器则用于减小稳态误差,其零极点配置靠近虚轴以保持系统特性。在实际设计中,需谨慎选择补偿器参数以达到最佳效果。
本文介绍了超前和滞后补偿器在控制系统中的作用。超前补偿器旨在提升系统稳定性,加快收敛速度,通过调整传递函数参数使闭环根轨迹向左移动。滞后补偿器则用于减小稳态误差,其零极点配置靠近虚轴以保持系统特性。在实际设计中,需谨慎选择补偿器参数以达到最佳效果。
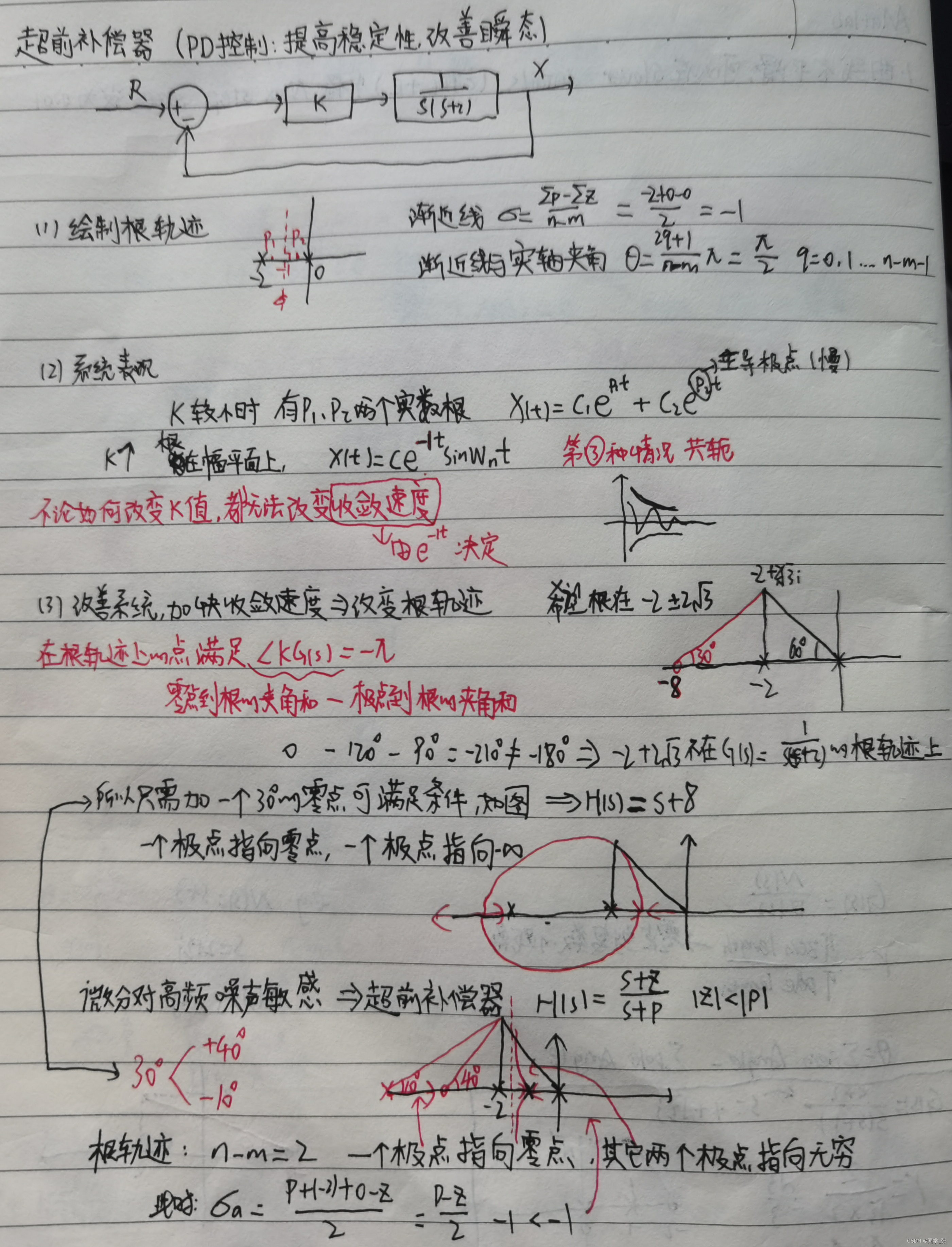
超前补偿器
目的
让加超前补偿器的目的是让系统更稳定,收敛更快
原理
(1)超前补偿器的传递函数形式为H(s) = (s+z) / (s+p)其中,∣ z ∣ < ∣ p ∣
(2)假设我们的系统如上,系统开环传递函数为此系统有两个极点,分别是0和-2,作出其根轨迹如下图所示,如果我们想要系统更加稳定,收敛速度更快,那么我们希望该闭环的根向左移动。通过根轨迹图我们知道,调整K值会有一个根为
,如果根是
更理想。
(3)引入超前补偿器改善系统
在根轨迹上的点满足∠kG(s) = -Π,即零点到根的夹角和 - 极点到根的夹角和
滞后补偿器
目的
减小稳态误差
原理
滞后补偿器的传递函数形式为H(s) = (s+z) / (s+p)其中,∣ z ∣ > ∣ p ∣
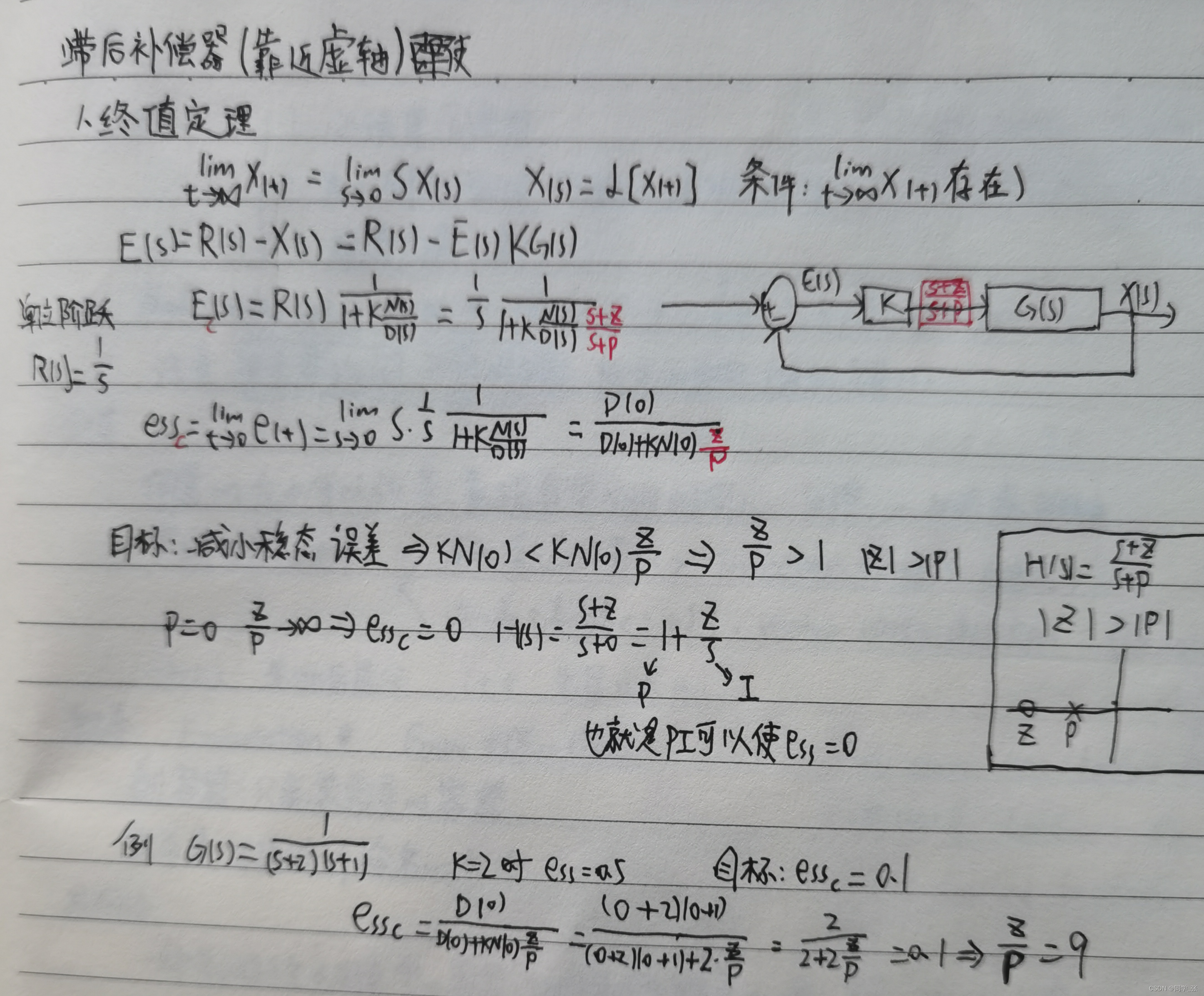
但此时无法确定 z、p 的值,所以用1、9/0.1、0.9两组数据进行观测,结果如下:

注意:设计滞后补偿器时,零极点对应尽量靠近复平面的虚轴,这样才能在减少稳态误差的同时不会过大的改变系统原有的特性(根轨迹)
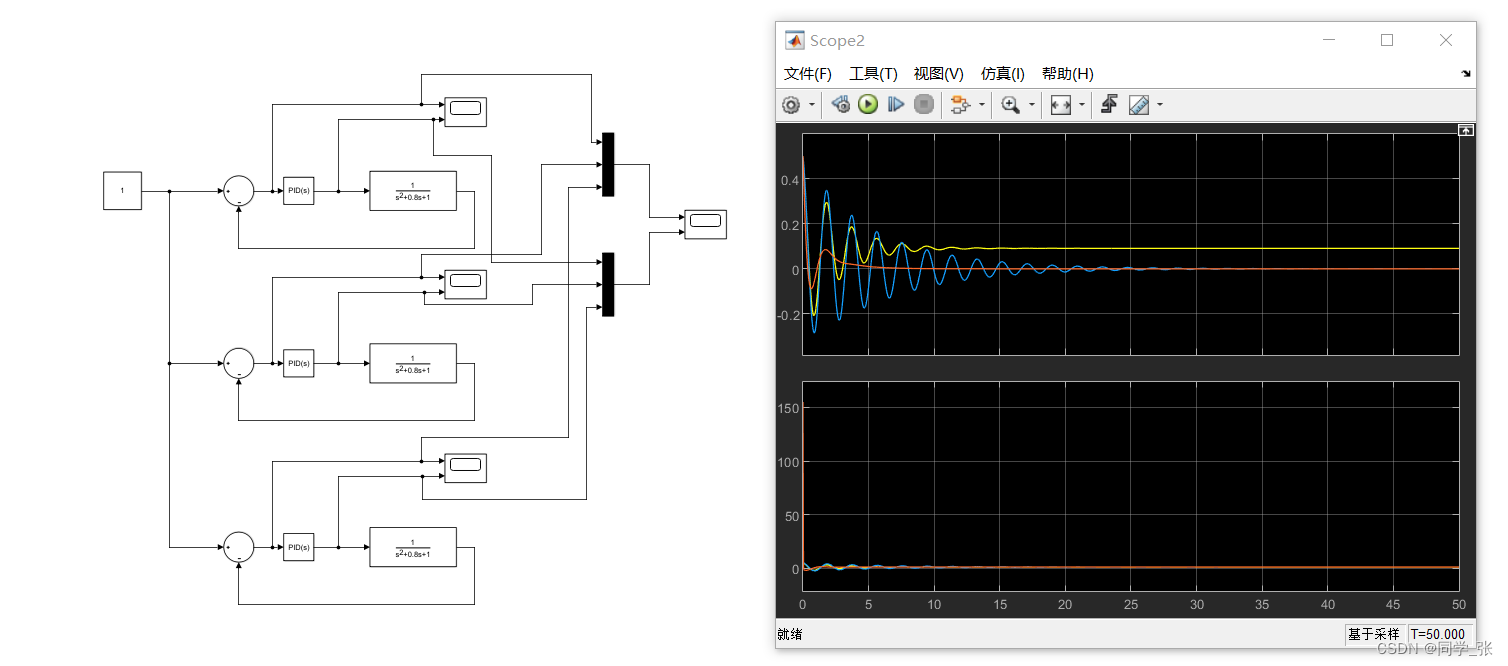
PID

















 2911
2911

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









