







目录
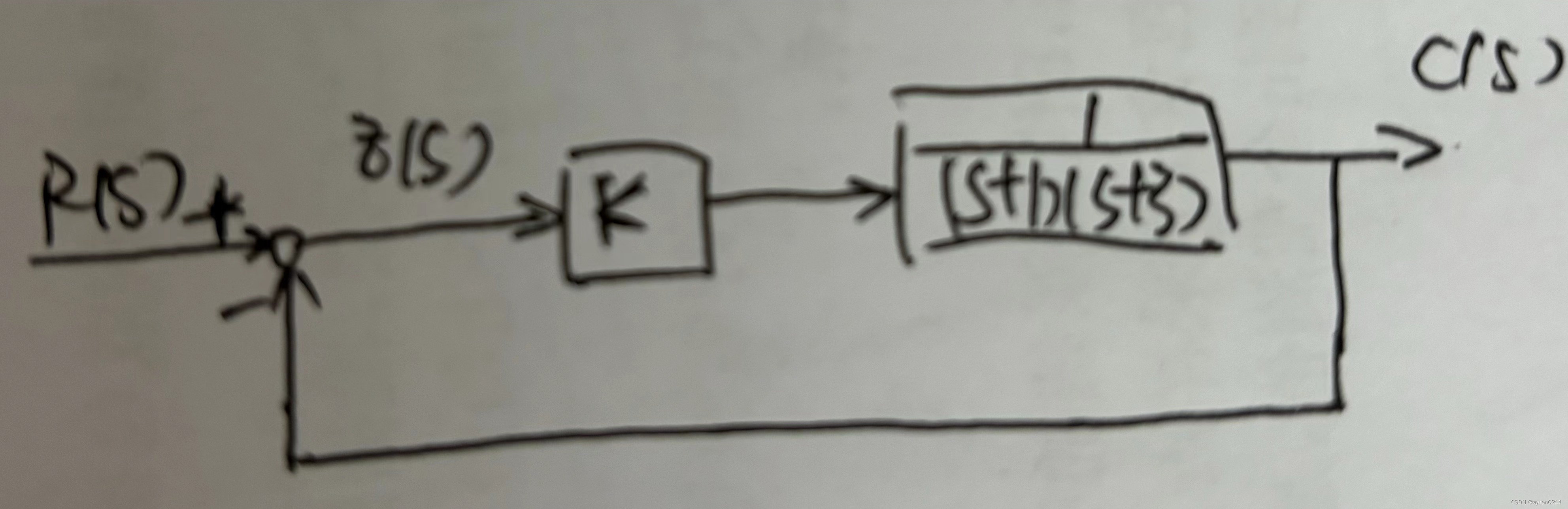
系统结构图:
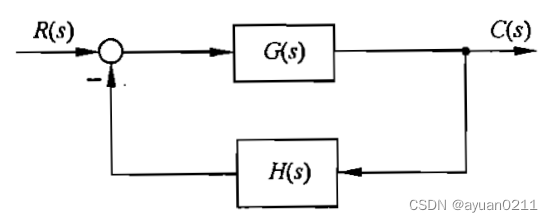
令:,
K:开环增益,传递函数为尾1标准型;
:根轨迹增益,传递函数为首1标准型;
那么题中:K=K*/8。
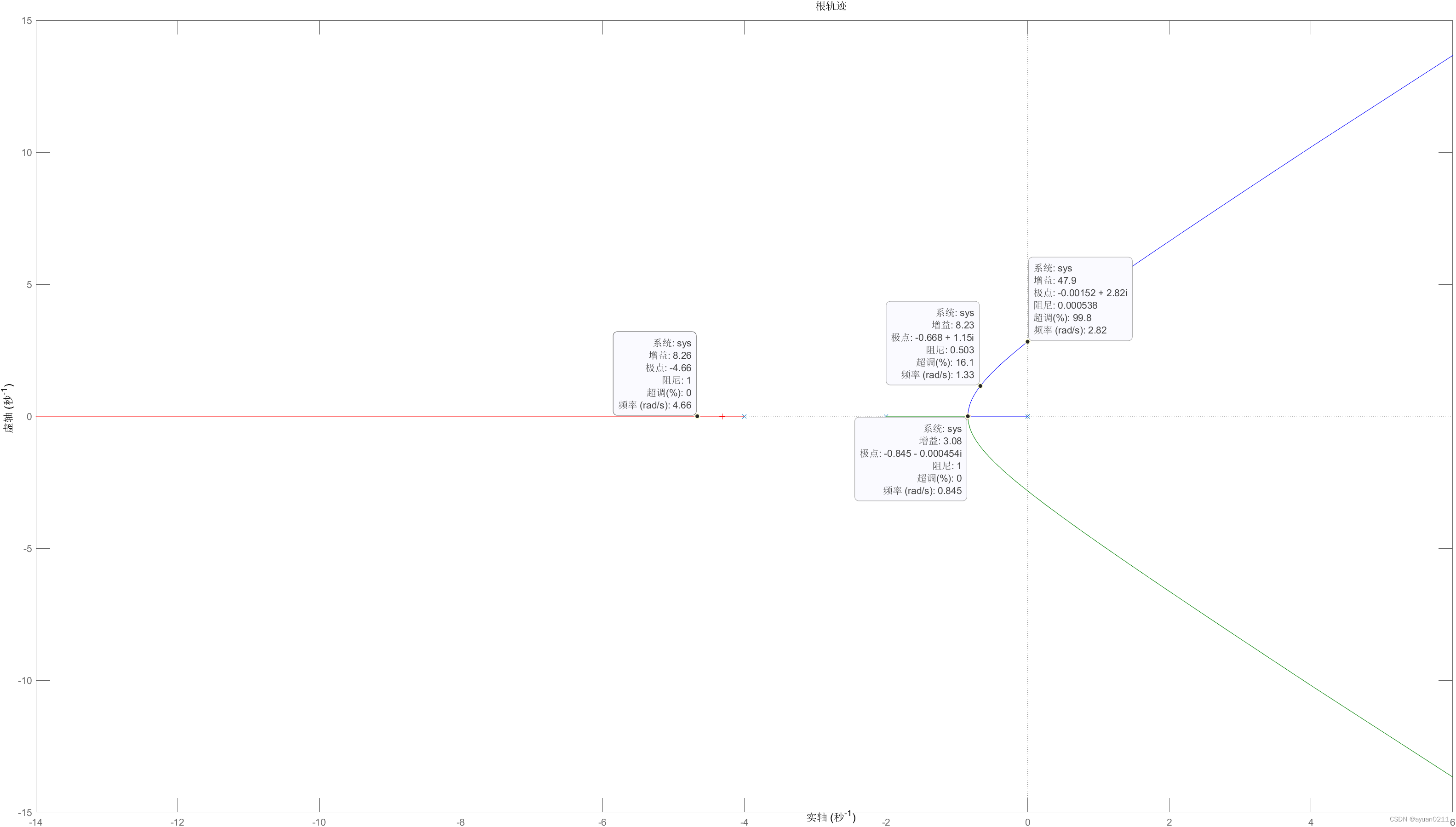
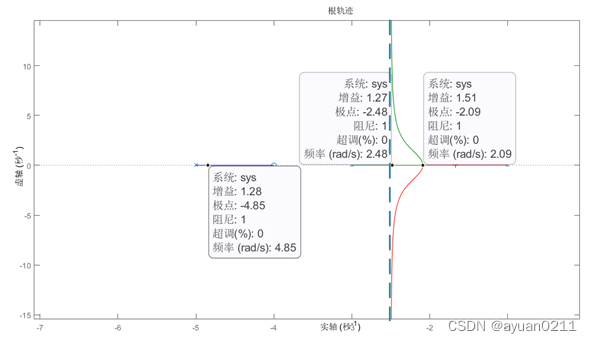
1.利用matlab绘制根轨迹
浅析:
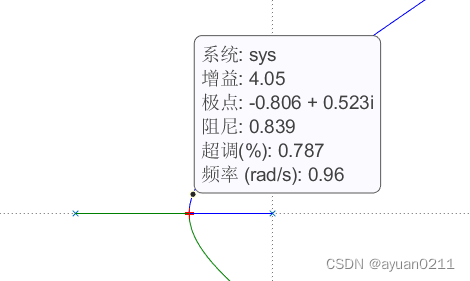
1.当根轨迹增益k=4.05时,主导极点为-0.806+0.523i,-0.806-0.523i,此时的阻尼比为0.839,系统超调量为0.787%,wn=0.96rad/s,根据二阶系统调节时间公式得:
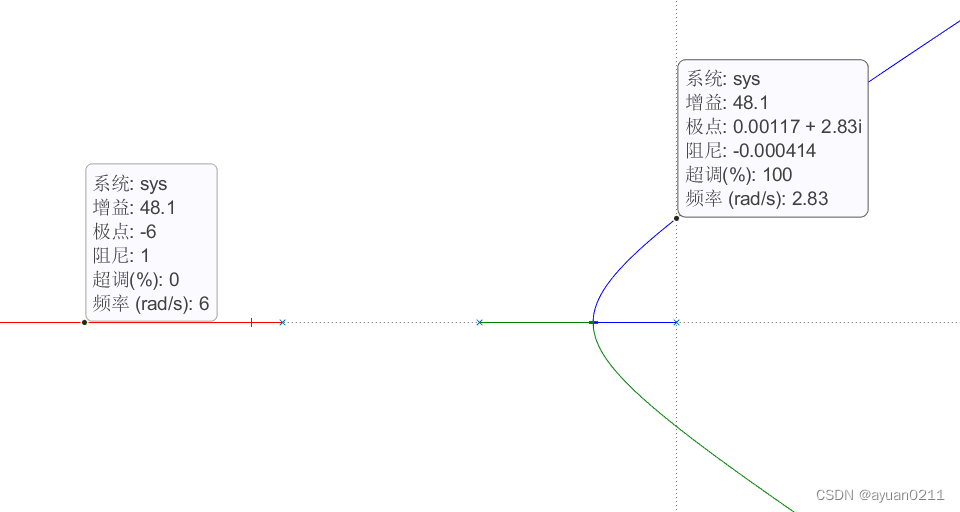
2.根轨迹增益K*=48时,系统超调量为100%,系统处于临界稳定状态,当K*<48时,系统才能保持稳定。
结论:改变根轨迹增益,可以改善系统性能,但改善程度有限,为了能够满足系统的性能需求,如:上升时间、调节时间、相位裕度、增益裕度,阻尼比等,还需要对系统进行补偿器(控制器)设计。
只要能够满足所需求的系统要求,可以选择任何控制补偿技术。
本文主要介绍的controller是超前补偿器及滞后补偿器,其结构框图如下:
遵循原则:如果期望极点位置在当前根轨迹的左边,添加超前补偿器来左移根轨迹。
如果期望极点位置在当前根轨迹的右边,添加滞后补偿器来右移根轨迹;
如果已经存在于根轨迹上,则只需要更改根轨迹增益即可。
一、超前补偿器:lead Compensator
1.说明:超前补偿器
补偿器零点比极点更靠近原点,实现相位为正,公式如下:
2.超前补偿器对系统根轨迹的影响
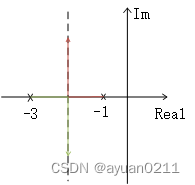
栗子:开环传递函数为:

根轨迹:Root Locus
渐近线:
在系统中加入一个超前补偿器:,系统框图如图所示:

渐近线更新为:,分子净增益为-1(-1=adding+Subtracting=more negative)
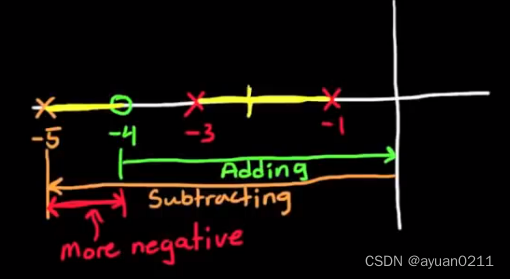
补偿后,系统根轨迹如图:
相比于原系统:在其他条件相同的情况下,渐近线左移,增加系统稳定性。
3.如何真正地设计超前补偿器
设计目的:将主导极点设计到某个你需要的位置,以此满足控制系统所需要的性能指标,主要使系统更稳定,具有更快的系统响应。
设计原理:为了使期望极点位置在补偿后根轨迹上,则需要满足相角条件---
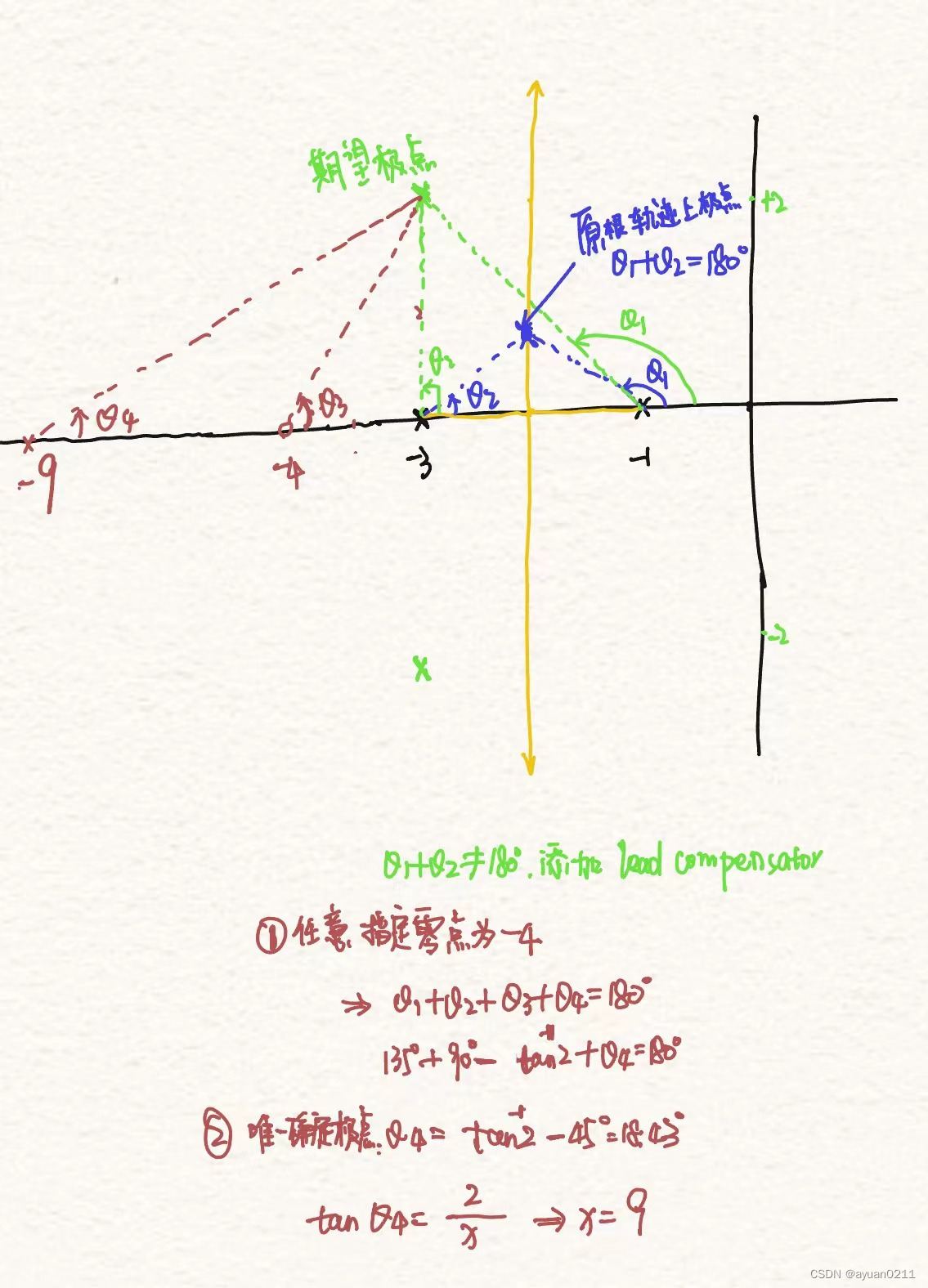
最后需要确认期望极点对应的根轨迹增益。
方法一:利用模值条件计算:
方法二:利用MATLAB绘制补偿后根轨迹,查找对应极点处的K*
零点位置如何选取?
注意事项:
(1)此方法设计的超前补偿器,并不能保证系统稳定,只能保证你的期望极点在根轨迹上。对于高阶系统,在引入零点时,其另外的极点可能进入虚轴的右半平面,导致系统不稳定。
(2)极点被左移,系统相位超前,具有更快的响应,但同时对高频输入的噪声产生响应,并且很难对高频模态进行精确建模,在实际系统中,需要手动调试,不能直接使用。
二、滞后补偿器:Lag Compensator
1.说明:滞后补偿器
补偿器极点比零点更靠近原点,实现相位和为负,公式如下:
2.超前补偿器对系统根轨迹的影响
滞后补偿器基本不改变原系统根轨迹,若改变,只微小改变,且不能影响主导极点,否则会对系统产生较大影响。
3.如何设计滞后补偿器
设计目的:使系统一定程度地消除稳态误差,滞后补偿器并不能完全消除系统的稳态误差。
设计原理:
与超前补偿器一致的栗子一致,开环传递函数为:,系统框图为:
由框图可知:E(s)=R(s)-C(s)=R(s)-E(s)KG(s)-->E(s)=R(s)1/(1+KG(s))。
采用终值定理FVT,系统稳态误差为:
由于,则
假设输入R(s)=unit step=1/s,单位阶跃信号。
可推导出:
若加入滞后补偿器,则
假设你期望的稳态误差为,代入上式,可求解出
但由此,我们只能得到的比例,并不能得到确定的零极点值。
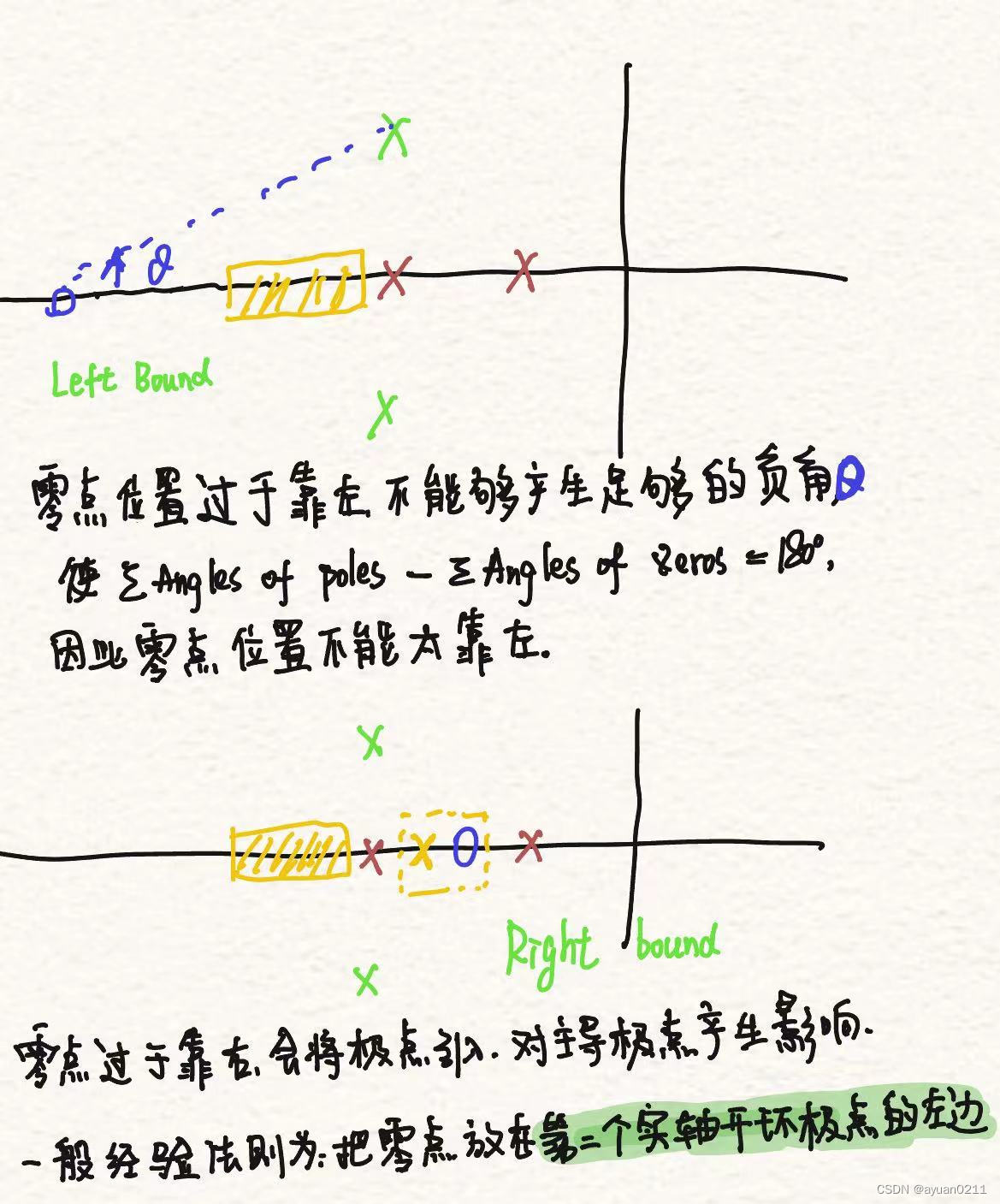
一般地,如果不希望改变原系统根轨迹,那么需要此零极点尽可能接近虚轴。因为在靠近虚轴时,即使零极点相差很大,角度上也不会相差很多,这保证了原根轨迹基本保持不变。(根轨迹上的点需要满足相角条件。)
具体原因见示意图:
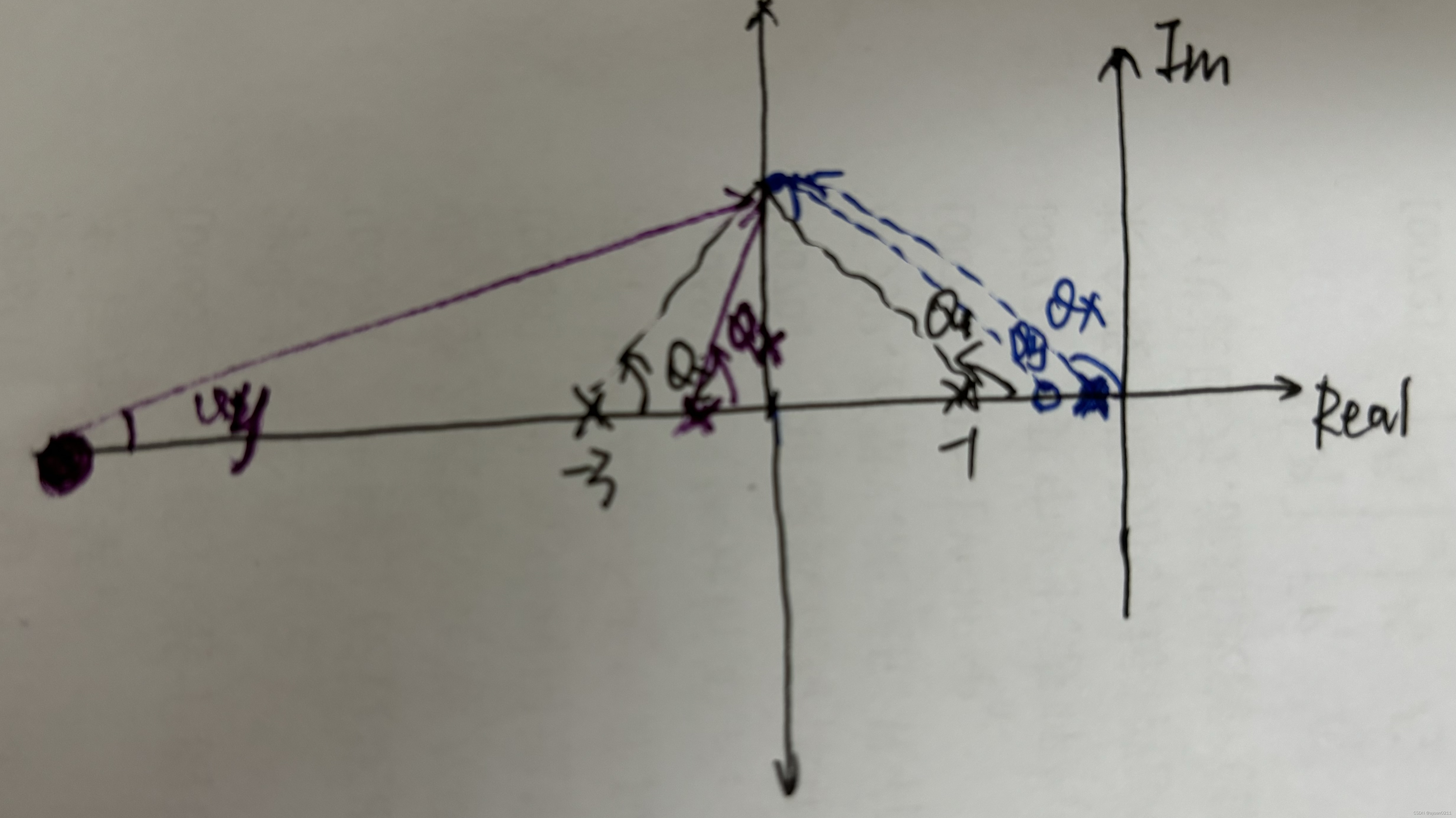
根轨迹上任意点满足:
添加滞后补偿器后,需满足:
由图可知面当零极点靠近虚轴时,零极点所产生的相角可以近似抵消,因为对原系统根轨迹影响不大,若是在紫色所在位置,将大大改变根轨迹位置,且有可能影响原系统的主导极点。
不过考虑到实际物理实现问题,零极点不可能无限接近零点,一般零点取-Length of first pole/50。
参考:
36.用根轨迹设计滞后补偿器。Designing a Lag Compensator with Root Locus_哔哩哔哩_bilibili
【自动控制原理】10_超前补偿器_Lead Compensator_PD控制器_比例微分控制_哔哩哔哩_bilibili
















 1364
1364











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











