






关于超前补偿器和滞后补偿器的理解
预备知识之根轨迹
根轨迹的一般形式原理方框图如下
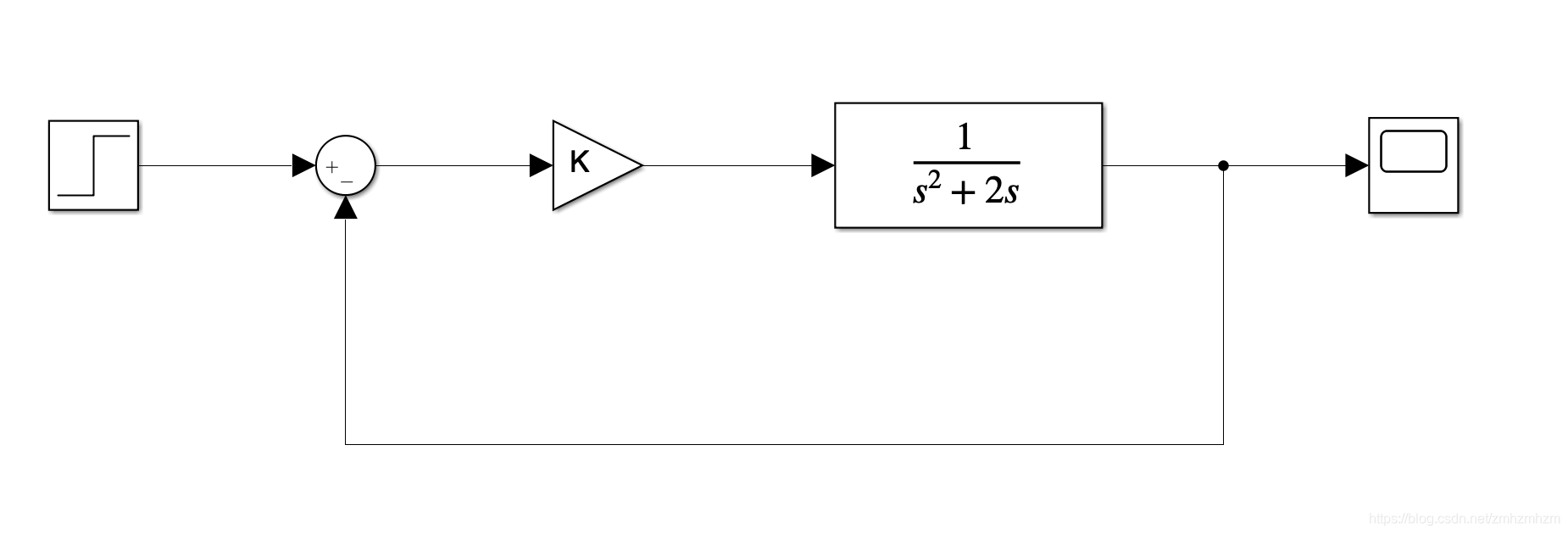
根轨迹描述的是该系统闭环传递函数的根随着增益K从零到无穷变化时而作出的图像,以上图传递函数为例,设系统传递函数为
G
(
s
)
G(s)
G(s),则该系统闭环传递函数为
G
c
l
o
s
e
(
s
)
=
K
∗
G
(
s
)
1
+
K
∗
G
(
s
)
G_{close}(s)=\frac{K*G(s)}{1+K*G(s)}
Gclose(s)=1+K∗G(s)K∗G(s),那么它的根就是令
1
+
K
∗
G
(
s
)
=
0
1+K*G(s)=0
1+K∗G(s)=0,即
1
+
K
∗
1
s
2
+
2
s
=
0
1+K*\frac{1}{s^2+2s}=0
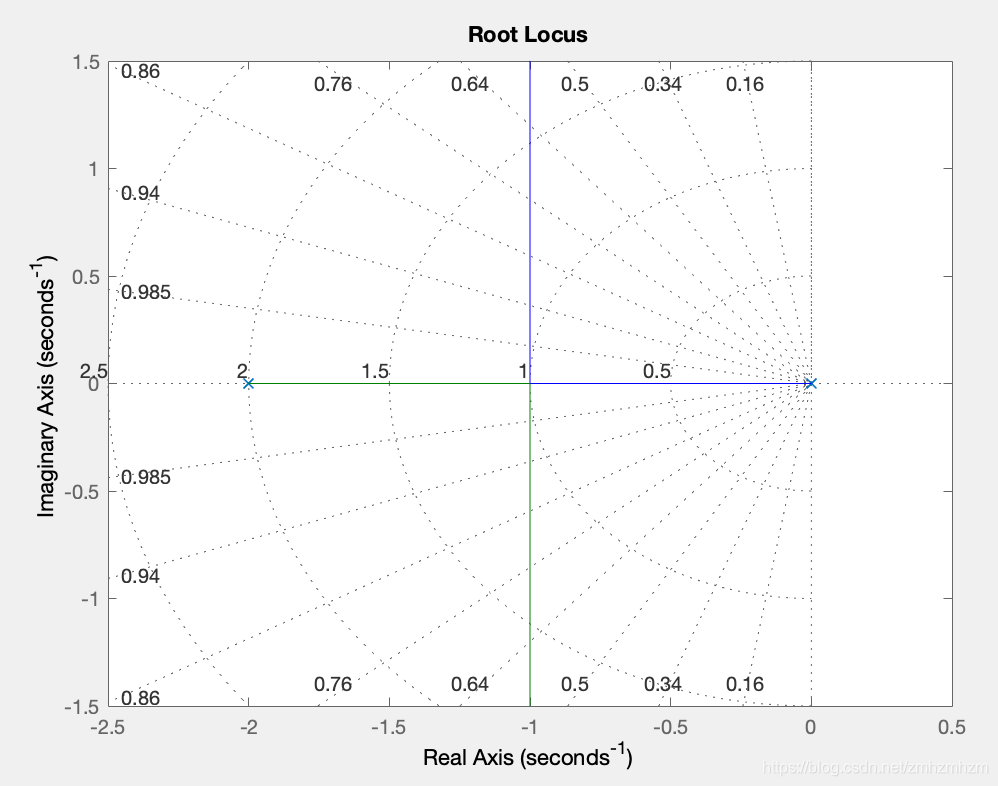
1+K∗s2+2s1=0,当K从0变化到无穷时,求出s的值,并在复平面做出轨迹,此轨迹即为根轨迹,上述例子在Matlab下用rlocus作图可直接得出根轨迹,如下:
-
判断一个复数是否在根轨迹上
将此复数分别与系统的开环传递函数的零极点相连,(注意,根轨迹研究的对象是系统的开环传递函数,但作图作的是闭环传递函数的根),此复数与零点的夹角之和减去此复数到各极点的夹角如果等于-180度,则说明该复数在根轨迹上
超前补偿器
-
目的
加超前补偿器的目的是让系统更稳定
-
原理
超前补偿器的传递函数形式为 H ( s ) = s + z s + p H(s)=\frac{s+z}{s+p} H(s)=s+ps+z ,其中, ∣ z ∣ < ∣ p ∣ \left|z\right|<\left|p\right| ∣z∣<∣p∣
假设我们的系统如上,系统开环传递函数为 G ( s ) = K s ( s + 2 ) G(s)=\frac{K}{s(s+2)} G(s)=s(s+2)K,此系统有两个极点,分别是0和-2,作出其根轨迹如上图所示,如果我们想要系统更加稳定,那么我们希望该闭环的根向左移动。通过根轨迹图我们知道,调整K值会有一个根为 − 1 + 2 3 i -1+2\sqrt3 i −1+23i,如果我们有一个根是 − 2 + 2 3 i -2+2\sqrt3 i −2+23i,那么此时的根一定比 − 1 + 2 3 i -1+2\sqrt3 i −1+23i时稳定,那么如何设计此系统才能让 − 2 + 2 3 i -2+2\sqrt3 i −2+23i这个根在根轨迹上呢,此时我们就需要引入超前补偿器
将 − 2 + 2 3 i -2+2\sqrt3 i −2+23i这个复数与系统开环传递函数的零极点连线,零点角度相加极点角度相减,我们会发现得出的角度为-210度,不等于-180度。因此我们需要引入一个30度的零点,这样相加才得-180度,这样才能改变根轨迹使得 − 2 + 2 3 i -2+2\sqrt3 i −2+23i在此根轨迹上。通过几何,我们发现可以在-8上增加一个零点,此时就相当于在闭环里增加了一项 s + 8 s+8 s+8,此时就相当于用了比例微分(PD)控制器,但我们知道PD控制器对高频噪声非常敏感,所以我们在增加一个零点的同时最好再增加一个极点,增加的零极点对需满足根轨迹的几何条件。因此此时就相当于在闭环里增加了一项 H ( s ) = s + 6 s + 10 H(s)=\frac{s+6}{s+10} H(s)=s+10s+6, H ( s ) H(s) H(s)的伯德图如下
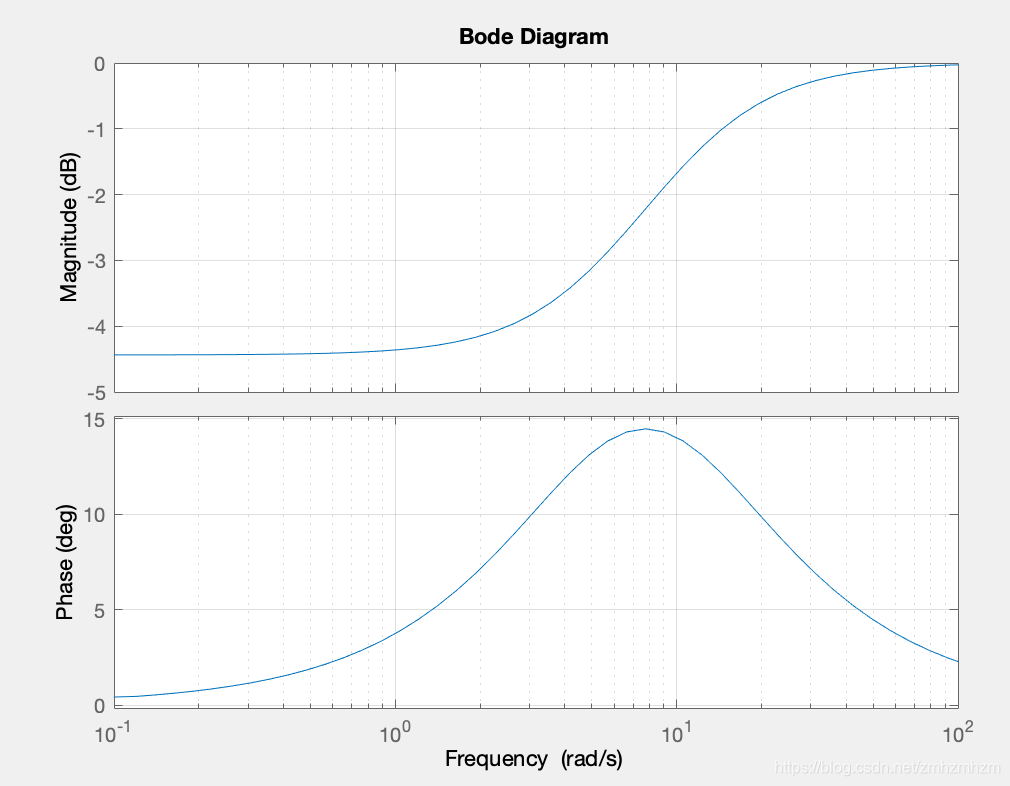
加入了这个环节后,可以改变根轨迹,使得 − 2 + 2 3 i -2+2\sqrt3 i −2+23i在根轨迹上,同时,从伯德图上可以看出,该环境在高频信号影响下不会无限制增大,因此不会对高频噪音过于敏感。从相频特性曲线可以看出,相角是正的,累加到系统的相位上可以使相角增大(超前),使系统相位裕度增大,增大系统稳定性。因为相角超前,故称为超前补偿器
滞后补偿器
-
目的
减少稳态误差
-
原理
滞后补偿器的传递函数形式为 H ( s ) = s + z s + p H(s)=\frac{s+z}{s+p} H(s)=s+ps+z ,其中, ∣ z ∣ > ∣ p ∣ \left|z\right|>\left|p\right| ∣z∣>∣p∣
例如 H ( s ) = s + 3 s + 1 H(s)=\frac{s+3}{s+1} H(s)=s+1s+3就是一个滞后补偿器的例子,伯德图如下:
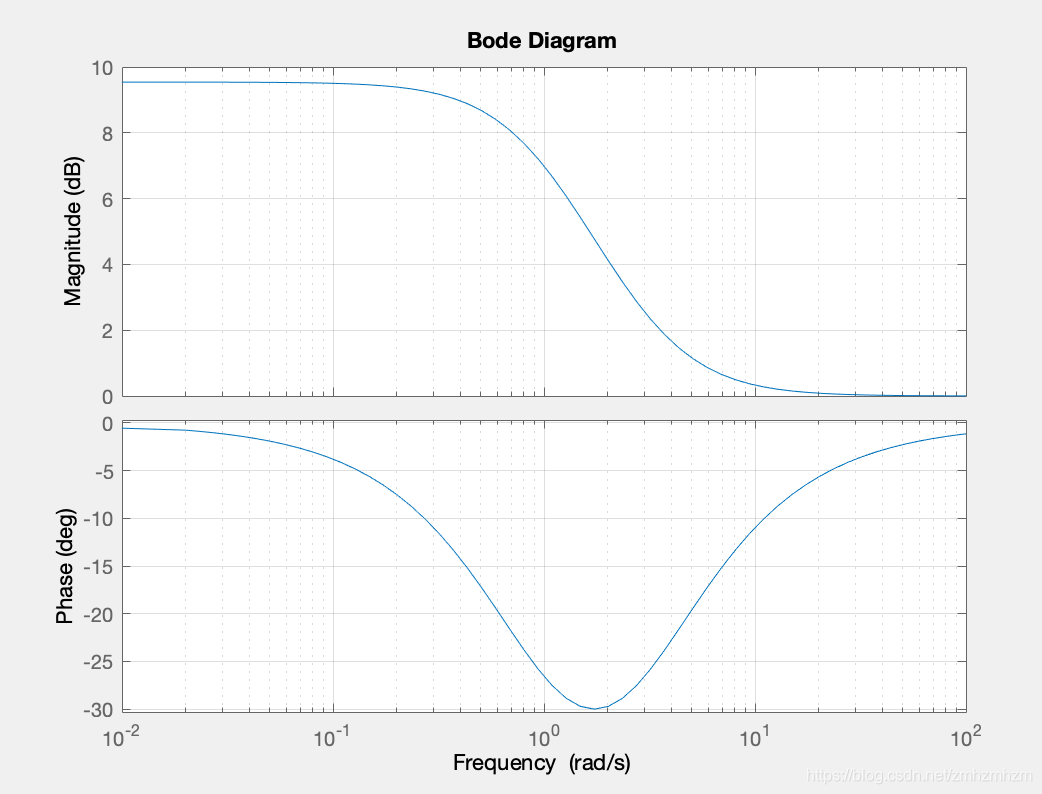
可以看出其相频特性曲线为负,累加到系统的相位后会使得整体相位滞后,故称为滞后补偿器。若考虑滞后补偿器的特例,即 H ( s ) = s + 3 s + 0 H(s)=\frac{s+3}{s+0} H(s)=s+0s+3,可化简为 H ( s ) = 1 + 3 s , H(s)=1+\frac{3}{s}, H(s)=1+s3,那么此时的滞后补偿器本质上就是一个比例积分控制器,我们知道PI控制器是可以消除稳态误差的,故滞后补偿器也是可以减少稳态误差的 -
注意
设计滞后补偿器时,零极点对应尽量靠近复平面的虚轴,这样才能在减少稳态误差的同时不会过大的改变系统原有的特性(根轨迹)

















 1941
1941

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









