







前 言
YOLO算法改进系列出到这,很多朋友问改进如何选择是最佳的,下面我就根据个人多年的写作发文章以及指导发文章的经验来看,按照优先顺序进行排序讲解YOLO算法改进方法的顺序选择。具体有需求的同学可以私信我沟通:首推,是将两种最新推出算法的模块进行融合形成最为一种新型自己提出的模块然后引入到YOLO算法中,可以起个新的名字,这种改进是最好发高水平期刊论文。后续改进将主要教大家这种方法,有需要的朋友可私信我了解。
第一,创新主干特征提取网络,将整个Backbone改进为其他的网络,比如这篇文章中的整个方法,直接将Backbone替换掉,理由是这种改进如果有效果,那么改进点就很值得写,不算是堆积木那种,也可以说是一种新的算法,所以做实验的话建议朋友们优先尝试这种改法。
第二,创新特征融合网络,这个同理第一,比如将原yolo算法PANet结构改进为Bifpn等。
第三,改进主干特征提取网络,就是类似加个注意力机制等。根据个人实验情况来说,这种改进有时候很难有较大的检测效果的提升,乱加反而降低了特征提取能力导致mAP下降,需要有技巧的添加。
第四,改进特征融合网络,理由、方法等同上。
第五,改进检测头,更换检测头这种也算个大的改进点。
第六,改进损失函数,nms、框等,要是有提升检测效果的话,算是一个小的改进点,也可以凑字数。
第七,对图像输入做改进,改进数据增强方法等。
第八,剪枝以及蒸馏等,这种用于特定的任务,比如轻量化检测等,但是这种会带来精度的下降。
...........未完待续

一、创新改进思路或解决的问题
用目标分割领域中的轻量级的上下文和空间特征校准网络来提升检测算法,跨领域改进创新。
二、基本原理
摘要:上下文建模或多级特征融合方法已被证明可有效提高语义分割性能。然而,它们并不是专门处理像素上下文不匹配和空间特征错位的问题,而且高计算复杂度阻碍了它们在实时场景中的广泛应用。在这项工作中,我们提出了一种轻量级的上下文和空间特征校准网络(CSFCN),以解决基于池化和基于采样的注意力机制的上述问题。CSFCN包含两个核心模块:上下文特征校准(CFC)模块和空间特征校准(SFC)模块。CFC采用级联金字塔池化模块,高效捕获嵌套上下文,然后根据像素上下文相似度聚合每个像素的私有上下文,实现上下文特征标定。SFC沿信道维度将特征拆分为多组子特征,并通过可学习采样将子特征传播到其中,以实现空间特征校准。在Cityscapes和CamVid数据集上的大量实验表明,我们的方法在速度和准确性之间实现了最先进的权衡。
三、添加方法
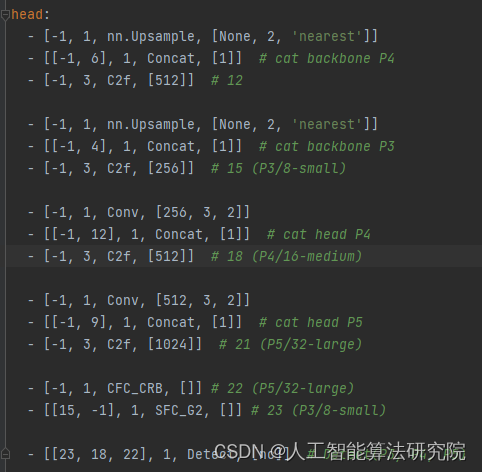
部分代码如下所示,具体可关注后私信我获取。yolov8n为baseline。
四、总结
预告一下:下一篇内容将继续分享深度学习算法相关改进方法。有兴趣的朋友可以关注一下我,有问题可以留言或者私聊我哦
PS:该方法不仅仅是适用改进YOLOv8,也可以改进其他的YOLO网络以及目标检测网络,比如YOLOv7、v6、v4、v3,Faster rcnn ,ssd等。
最后,有需要的请关注私信我吧。关注免费领取深度学习算法学习资料!

















 855
855

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











