






最近做项目需要使用 Touch 设备连接机械臂进行运动,因此买了设备并进行链接,,配置过程遇到一些问题,但好在有前人的经验,所以相对顺利,下面总结一下我的配置流程。
设备与环境
1. 设备:Touch-HID(需要注意设备版本,我是 24 年暑假买的,销售说是新款的设备,HID-USB 的,后面只有一个电源孔和一个 usb 孔)设备如图:

2.环境
Ubuntu 版本:20.04
ROS:noetic
配置
CSDN 上的教程很详细,下面的这个文章及其引用的文章都是很好的参考,感谢这位兄弟的整理。
Geomagic Touch 力反馈手柄在Ubuntu 20.04 ROS1 noetic 环境下的配置_touch手控器的建模-CSDN博客
下面说下我配置这些遇到的问题以及解决方法:
(1)文件下载
还是用的这位老哥的,靠谱:
【3D Systems Touch在20.04 ubuntu(noetic)环境下的配置与使用】_ubuntu 3dtouch-CSDN博客
(2)安装OpenHaptic
我是先装的OpenHaptic,按照前文提到的文章的说法,先安装了如下组件和依赖:
sudo apt install libncurses5-dev freeglut3 build-essential
sudo apt install freeglut3-dev libncurses5-dev zlib1g-dev最后在解压后的文件夹内运行:
sudo ./install即可安装完成。
在这里尝试验证开发包是否安装成功,但是会存在动态链接库的问题,无法 make 成功,但是好像不影响后续使用,可能是新版本的原因吧。
(3)Touch 驱动安装
我觉得直接按照下面这个链接中的做法应该就可以顺利完成:
【3D Systems Touch在20.04 ubuntu(noetic)环境下的配置与使用】_ubuntu 3dtouch-CSDN博客
但是我当时没注意,跟着其他文章所说去设置了/usr/share/3DSystems,后面发现好像没用到,应该是对应着老版本的设备使用的。不过就算设置了也没关系,需要注意的是不要去运行 setup ,这里再分享一个文章,和我当时的流程一样:
在ubuntu20.04下配置Geomagic Touch-HID的方法以及使用_geomagic touch ros-CSDN博客
前置内容和其他文章所说都一样,一直到创建完 config 文件夹。
此时回到解压后文件夹的bin目录下,是有这三个文件的
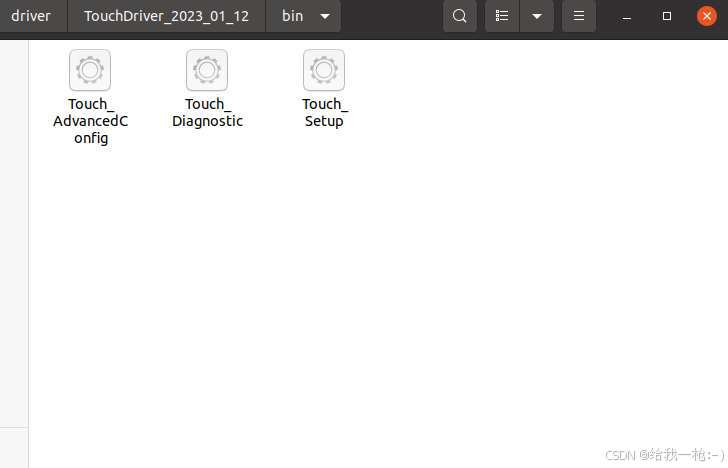
这里需要注意,不要直接运行 setup,而是运行 AdvancedConfig,再进行重命名和复位即可。
关掉之后运行 Diagnostic 即可进入配置。
注意:如果已经运行了 setup,按照下面链接中的 guide 删除 config 即可。
最后运行Touch_Diagnostic 后成功,里面的设备模型看着很简陋,不知道是不是都这样。
还有一个问题是找不到/dev/ttyACM*的问题,但是不用管,应该是被官方优化了,毕竟之前每次链接都要设置确实很麻烦:
Geomagic Touch HID 找不到/dev/ttyACM*的问题_geomagic touch device driver-CSDN博客
以上是全部内容,主要还是参考其他博主的文章,以及按照官网给出了一个 setup 过的处理方法。最后再次感谢各位博主的分享。

















 1155
1155

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









