







 本文介绍了IMU(惯性测量单元)在机器人姿态检测中的作用,讲述了如何使用Python实现获取IMU数据,包括数据解读和航向锁定的方法。重点提及了回调函数在数据处理中的应用,以及如何将数据输出到屏幕或运动控制节点。
本文介绍了IMU(惯性测量单元)在机器人姿态检测中的作用,讲述了如何使用Python实现获取IMU数据,包括数据解读和航向锁定的方法。重点提及了回调函数在数据处理中的应用,以及如何将数据输出到屏幕或运动控制节点。
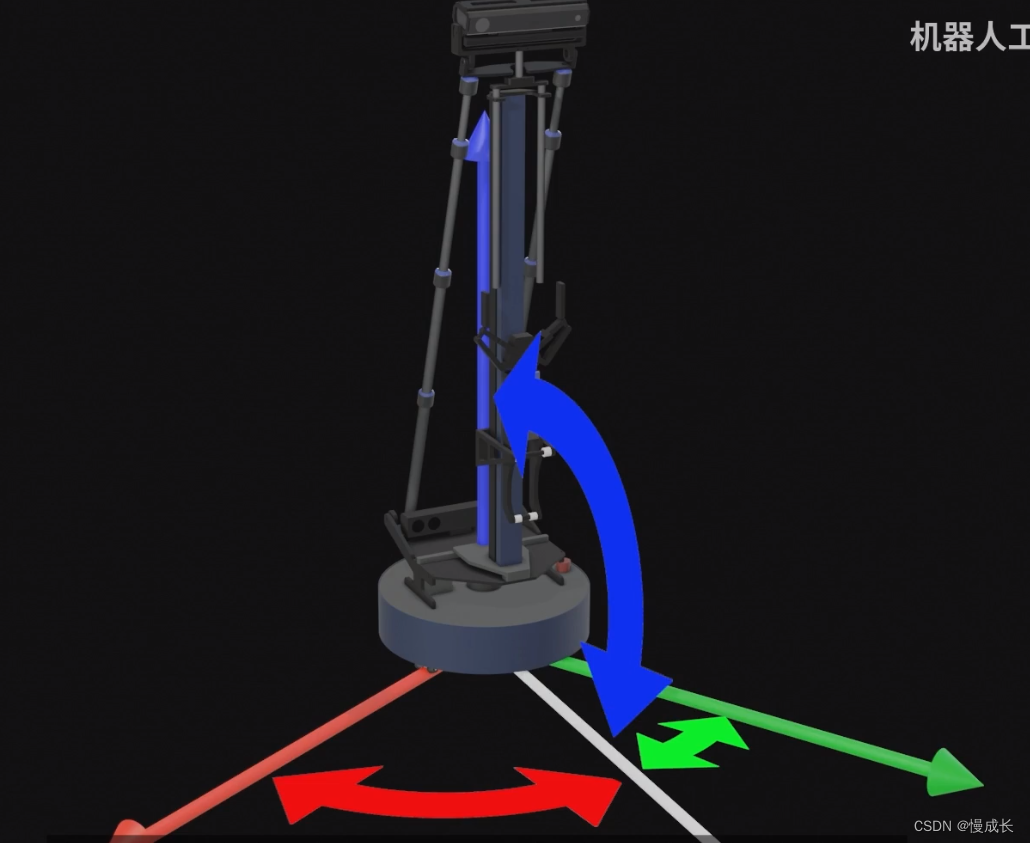
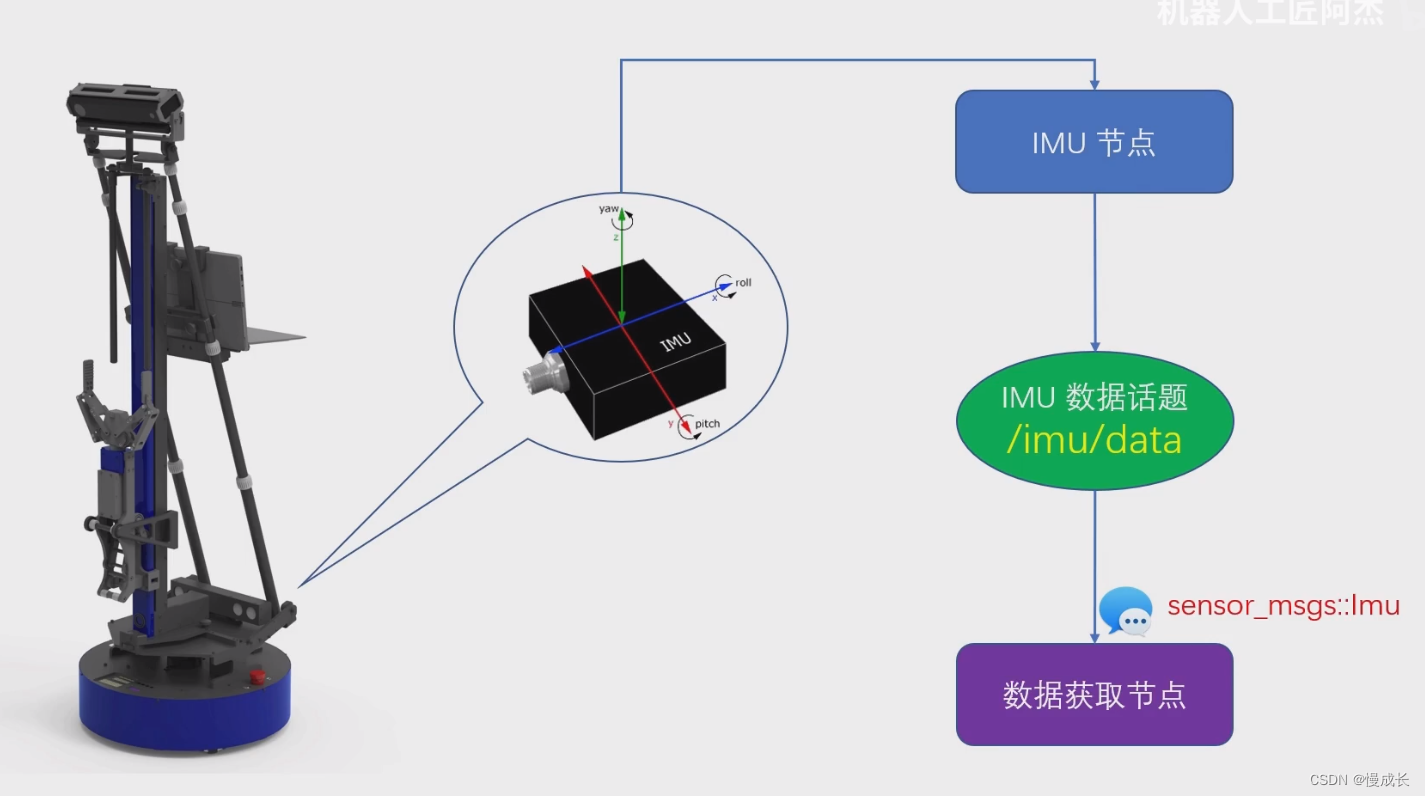
什么是IMU
也即惯性测量单元,用于测量机器人的空间姿态,
其消息格式是sensor_msg中的Imu.msg
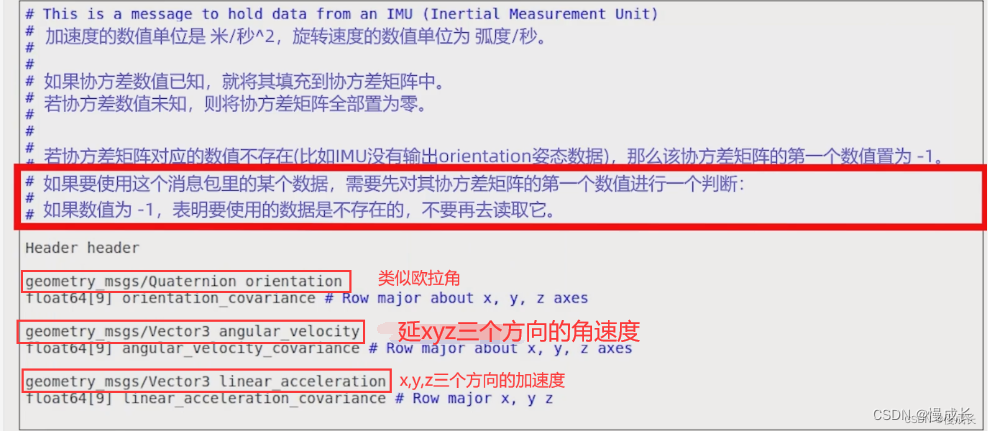
其中第一个数据的解释:机器人朝向相对于xyz三个坐标轴的偏移量,这个数据类型有三个分量,其中第四个用来解决万向锁的问题,和欧拉角描述一样,有兴趣可以去了解一下
获取IMU数据python实现
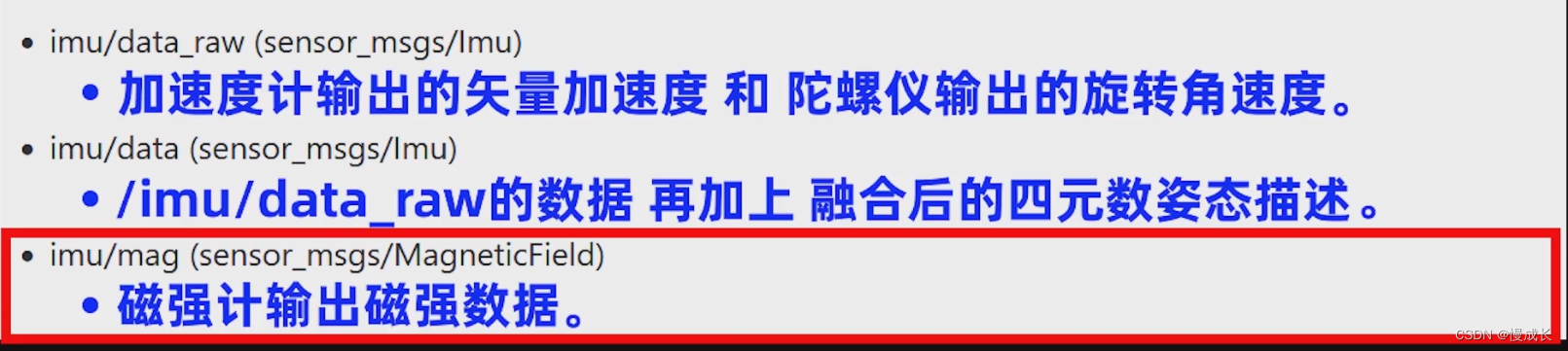
IMU三个话题
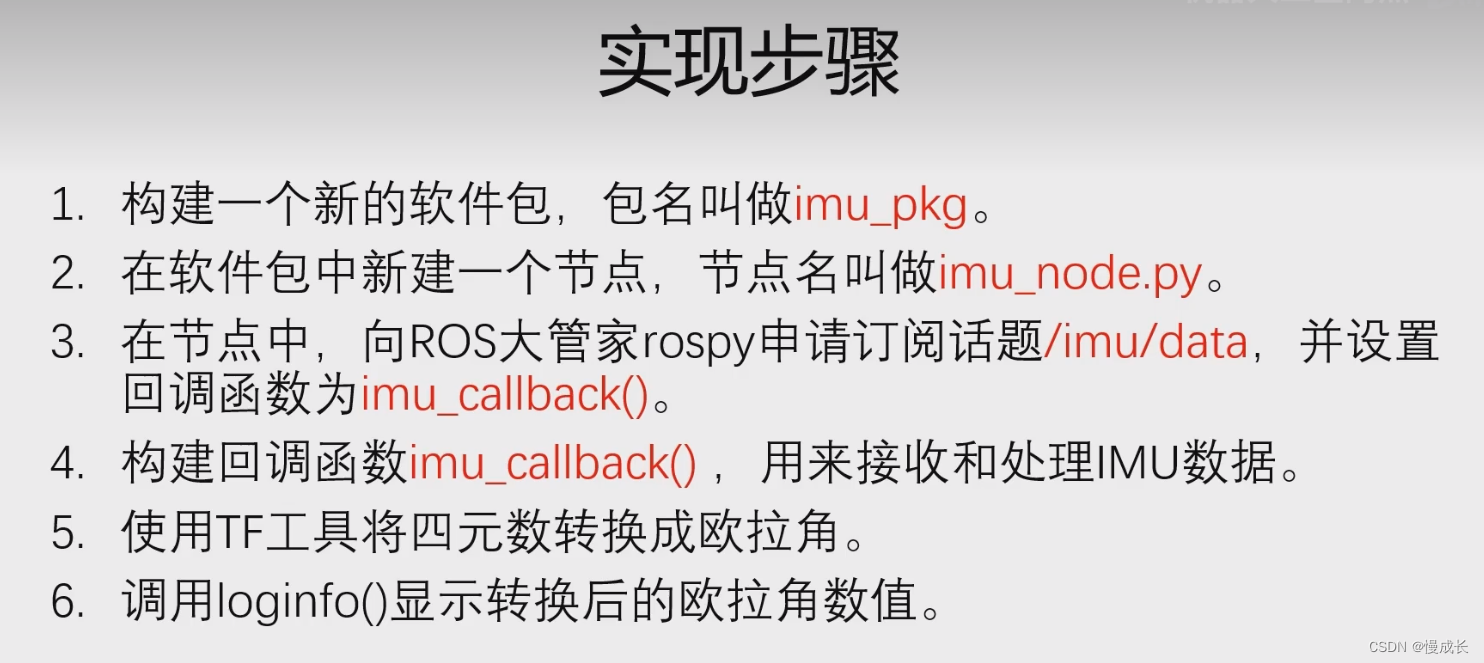
具体步骤思路
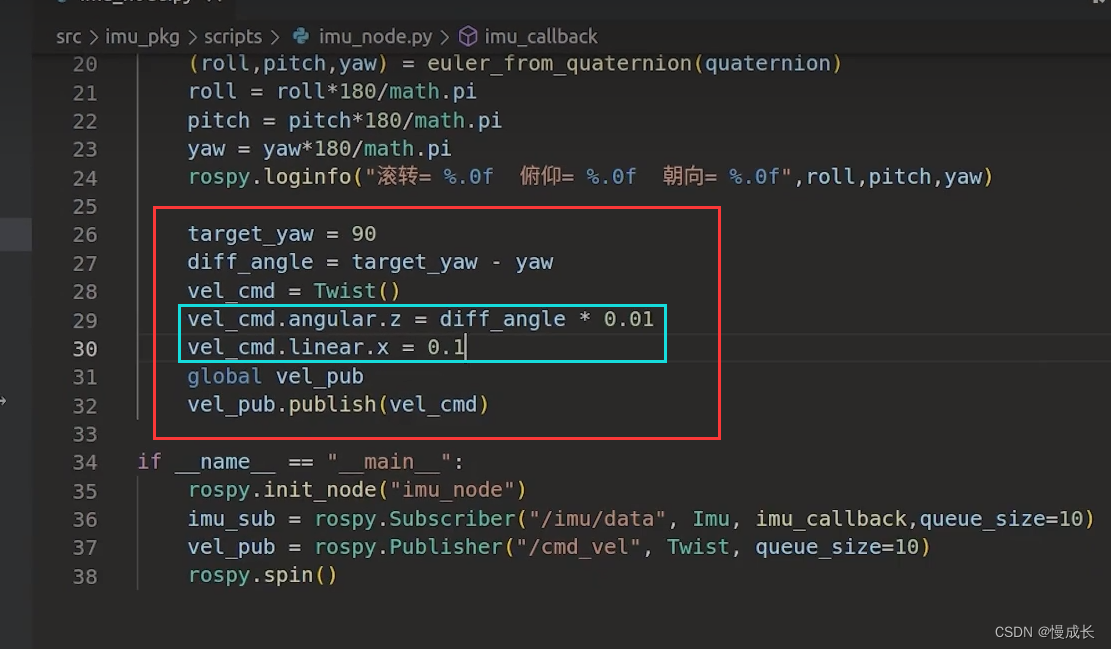
具体代码

IMU航向锁定
实际上就是上面代码加一下红色框到的部分,然后从输出到屏幕变成发布到运动控制节点,其实我们可以看到,从一个传感器节点获取到了数据,然后在回调函数中或者一个循环中进行相应的转换(其实回调函数就是接受到每次数据后然后进行处理的一个函数,这个处理的结果可以输出屏幕也可以发布到另外节点)


















 2903
2903

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









