






目录
💥1 概述
📚2 运行结果
🎉3 参考文献
👨💻4 Matlab代码
💥1 概述
射频(Radio frequency,缩写为RF),又称无线电频率、无线射频、高周波,为在3kHz至300 GHz这个范围内的震荡频率,这个频率相当于无线电波的频率,以及携带着无线电信号的交流电的频率。RF通常被用来指电子震荡,而不被用在机械震荡上,然而机械射频系统仍然是存在的(如机械滤波器与射频微机电系统(英语:RF MEMS))。
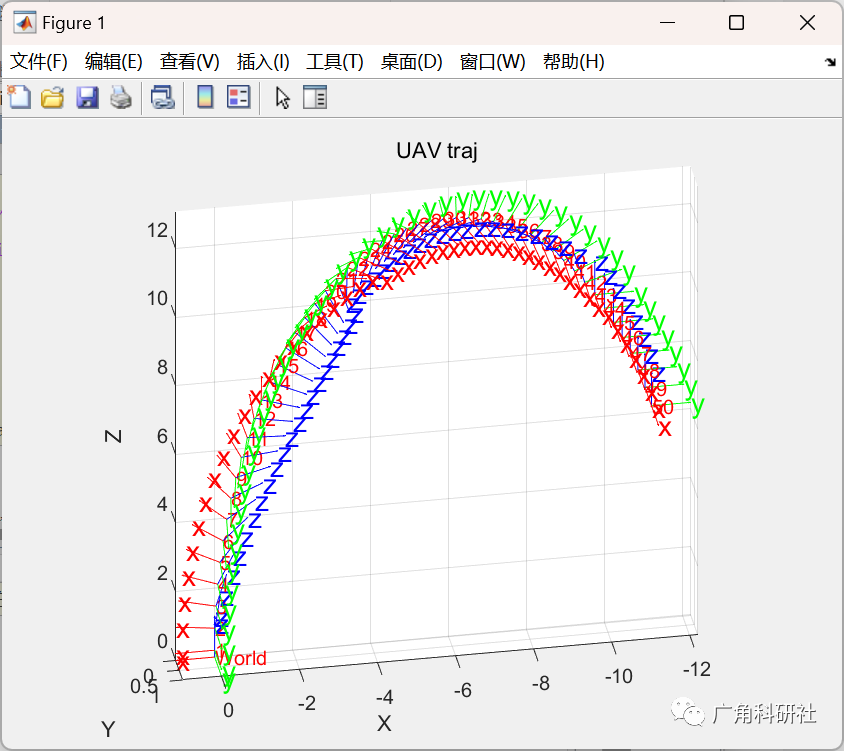
无表示模型预测控制 (RF-MPC) 是用于动态腿机器人的 MATLAB 仿真框架。RF-MPC使用旋转矩阵表示方向,因此不存在与欧拉角相关的奇点问题。旋转矩阵上的线性动力学是使用基于变化的线性化(VBL)得出的。
RF-MPC算法最初是为四足机器人设计的,经过一些修改后适用于无人机。
📚2 运行结果

主函数部分代码:
%% initialization
clear all;close all;clc
addpath(genpath("Utils"));
addpath fcns fcns_MPC
%% --- parameters ---
% ---- gait ----
% 0-control; 1-traj;
gait = 1;
p = get_params_UAV(gait);
p.playSpeed = 1;
p.flag_movie = 1; % 1 - make movie
use_qpSWIFT = 0; % 0 - quadprog, 1 - qpSWIFT (external)
dt_sim = p.simTimeStep;
SimTimeDuration =p.SimTimeDuration; % [sec]
MAX_ITER = floor(SimTimeDuration/p.simTimeStep);
% desired trajectory
p.acc_d = 0; %acceleration
p.vel_d = [0;0];% x,y
p.yaw_d = 2;%yaw
%% Model Predictive Control
% --- initial condition ---
% Xt = [pc dpc vR wb]': [18,1] represents the robot's position, velocity, attitude, and angular velocity information.
% Ut=[t1 t2 t3 t4]' : [4,1] represents thrusts of four propeller
[Xt,Ut] = fcn_gen_XdUd_UAV(0,[],p);
% --- logging ---
tstart = 0;
tend = dt_sim;
[tout,Xout,Uout,Xdout,Udout,Uext,FSMout] = deal([]);
% --- simulation ----
h_waitbar = waitbar(0,'Calculating...');
tic
% 离线计算
for ii = 1:MAX_ITER
% --- time vector ---
t_ = dt_sim * (ii-1) + p.Tmpc * (0:p.predHorizon-1);%MPC horizon
% --- Traj ---
if gait == 1
% Ud: the simple force allocation of gravity based on the number of propeller.
[p,Xd,Ud] = fcn_UAV_ref_traj(t_, Xt, p);
else
[Xd,Ud] = fcn_gen_XdUd_UAV(t_,Xt,p);
end
% --- MPC ----
% form QP
[H,g,Aineq,bineq,Aeq,beq] = fcn_get_QP_form_eta_UAV(Xt,Ut,Xd,Ud,p);
if ~use_qpSWIFT
% solve QP using quadprog
% options1 = optimset('Display', 'iter');
% [zval] = quadprog(H,g,Aineq,bineq,Aeq,beq,[],[],[],options1);
[zval] = quadprog(H,g,Aineq,bineq,Aeq,beq,[],[],[]);
else
% interface with the QP solver qpSWIFT
[zval,basic_info] = qpSWIFT(sparse(H),g,sparse(Aeq),beq,sparse(Aineq),bineq);
end
Ut = Ut + zval(1:4);
% --- external disturbance ---
[u_ext,p_ext] = fcn_get_disturbance(tstart,p);
p_ext=0*p_ext;
u_ext = 0*u_ext;
p.p_ext = p_ext; % position of external force
% --- simulate ---
[t,X] = ode45( @(t,X)dynamics_SRB_UAV(t,X,Ut,Xd,0*u_ext,p), [tstart,tend] ,Xt);
% --- update ---
% 更新
Xt = X(end,:)';
tstart = tend;
tend = tstart + dt_sim;
% --- log ---
% 拼接和记录
lent = length(t(2:end));
tout = [tout;t(2:end)];
Xout = [Xout;X(2:end,:)];
Uout = [Uout;repmat(Ut',[lent,1])];
Xdout = [Xdout;repmat(Xd(:,1)',[lent,1])];
Udout = [Udout;repmat(Ud(:,1)',[lent,1])];
Uext = [Uext;repmat(u_ext',[lent,1])];
% FSMout = [FSMout;repmat(FSM',[lent,1])];
🎉3 参考文献
[1]鲁建厦,赵林斌,汤洪涛.基于射频识别库存管理的无人机三维路径规划[J].计算机集成制造系统,2018,24(12):3129-3135.
部分理论引用网络文献,若有侵权联系博主删除。

















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









