






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录

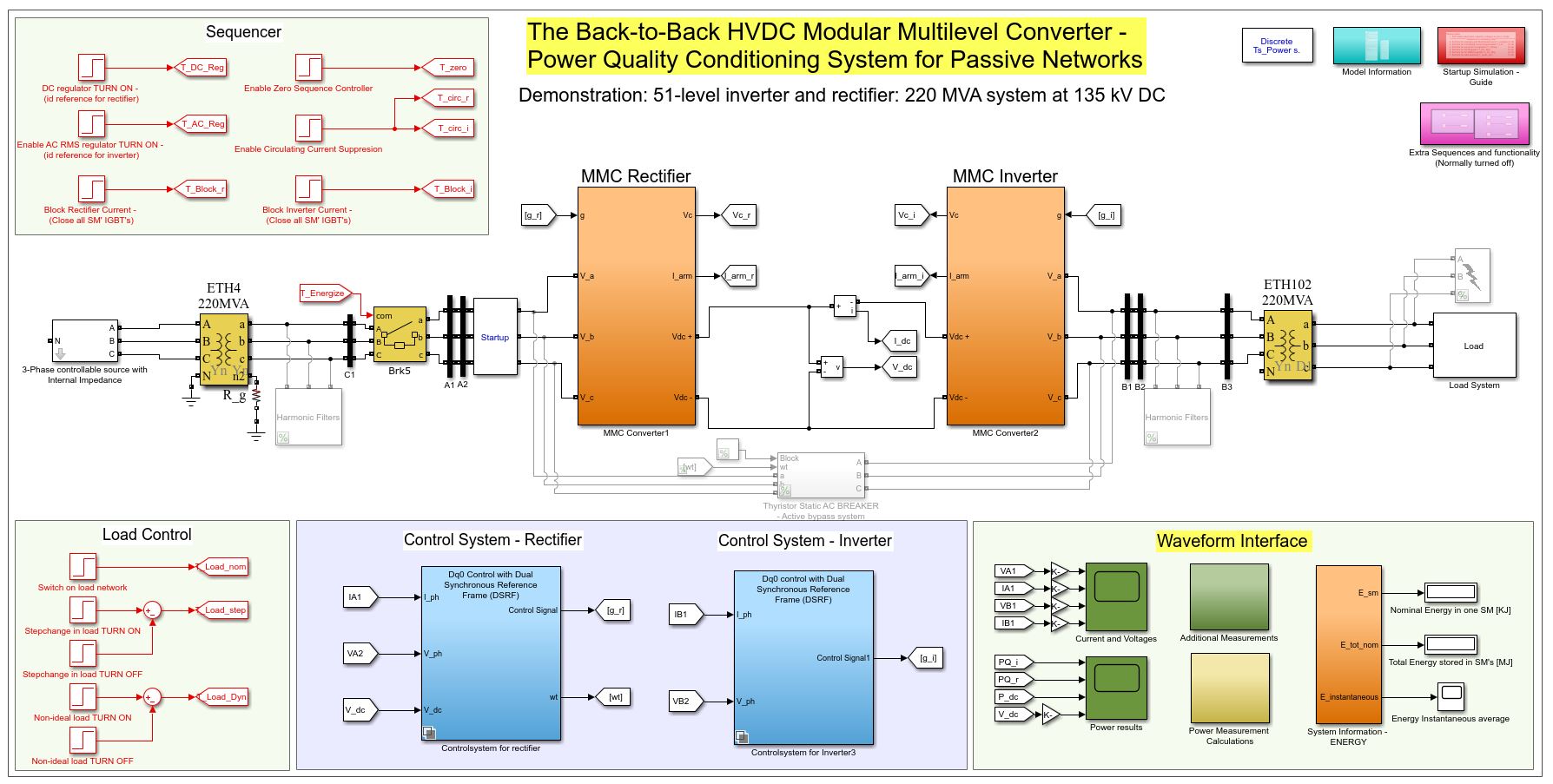
💥1 概述
这是一个作为电力质量调节系统为被动网络供电的背对背高压直流调制多电平变流器。该模型的目的是模拟背对背高压直流调制多电平变流器(MMC)作为一个电力质量调节系统为整个电力网络供电。因此,这个模块化多电平逆变器可以作为远端变流器运行,也称为孤岛模式。
这样一个电力质量调节系统的主要目标是能够保护敏感的电力网络免受瞬态电压降的影响。这是通过利用MMC子模块的内部储能以及整流器在瞬态电压降期间控制线路电流为名义值来实现的。这使得系统具有非常灵活和即时的缓解能力。此外,该系统还具有一些强大的功能,如无功功率补偿、低谐波失真和卓越的冗余性。
背对背高压直流调制多电平变流器用于被动网络,作为电力质量调节系统为被动网络供电。该系统旨在模拟背对背高压直流调制多电平变流器(MMC)作为电力质量调节系统,为整个电力网络提供电力。在此模型中,多电平逆变器作为远端变流器运行,也被称为孤岛模式。
该电力质量调节系统的主要目标是保护敏感的电力网络免受瞬时电压降低的影响。为实现这一目标,系统利用MMC子模块的内部能量储存,并在瞬时电压降低期间通过控制整流器以维持线电流在名义值来实现。这使得系统具有非常灵活和即时的缓解能力。此外,该系统还具备无功功率补偿、低谐波失真和优良的冗余性等强大特性。
综上,背对背高压直流调制多电平变流器作为电力质量调节系统为被动网络供电,通过其内部能量储存和灵活控制,能够有效保护电力网络免受瞬时电压降低的影响,同时具备多种强大特性,为整个电力系统的稳定和可靠运行提供了重要保障。
📚2 运行结果







其他就不一一展示。
Matlab代码:
clc
%Initial time constants:
Ts_Power =20e-6; %Power System sampling time.
Ts_Control=40e-6; %Control system sampling time.
Fc = 50; %Switching frequency of semi-conductors.
%% Grid Parameters:
f = 50; %grid frequency.
w = 2*pi*f; %angular frequency.
V_prim = 400e3; %Primary dist grid.
V_grid = 66e3; %RMS L-L Voltage of B2B.
Skk = 12000e6; %Maximum short circuit power of source
xr_ratio = 14.28; %X/R ratio of grid.
z_int_400 = sqrt(3)*(V_prim)^2/Skk; %Base impedance in short circuit of source.
R_int = sqrt((z_int_400^2)/(1+xr_ratio^2)); %Internal Resistance source.
X_int = R_int*xr_ratio; %Internal reactance source.
L_int = X_int/w; %Internal inductance source.
z0z1 = 0.8; %Zero sequence impedance
%% Load Parameters:
P_nom = 220e6; %Nominal power of converters.
S_nom = 220e6; %Nominal apparent power of converters.
I_nom = S_nom/(sqrt(3)*V_grid); %Nominal line current.
P_load = 110e6; %Load active power nominal.
Q_load = 0e6; %Load reative power nominal.
S_load = sqrt(P_load^2 + Q_load^2); %Apparent load power
R_startup = 17; %Startup resistance for inrush.
P_DynLoad = 100e6; %Non-ideal Load Active Power.
Q_DynLoad = 50e6; %Non-ideal Load Reactive Power.
%%
%%TRANSFORMER 1:
V1_prim = V_prim;
V1_sec = V_grid;
S1_nom = P_nom;
L1_pu = 0.109;
R1_pu = 0.00206;
Rg_T1 = 40;
%%
%%TRANSFORMER 2:
V2_prim = V_grid;
V2_sec = 18e3;
S2_nom = P_nom;
L2_pu = 0.0824;
R2_pu = 0.00206;
%% DC Link Parameters:
Vdc_nom = 135e3; %Rated DC voltage.
%% Submodule Parameters - Rectifier and Inverter:
n = 50; %Number of submodules per arm, Rectifier.
n2 = 50; %Number of submodules per arm, Inverter.
C_pm = 10.48e-3; %Submodule capacitor capacitance.
Vc_pm_i = 0*Vdc_nom/n2; %Initial SM capacitor voltage inverter.
Vc_pm_r = 0*Vdc_nom/n; %Initial SM capacitor voltage rectifier.
%% Converter arms - Rectifier and Inverter:
R_arm = 0.03; %Arm resistance.
L_arm_pu = 0.15; %Arm inductance in per-unit.
Z_base66 = (sqrt(3)*(V_grid)^2)/(S_nom); %Network impedance.
L_arm = L_arm_pu*Z_base66/w; %Arm inductance.
R_arm_pu = R_arm/Z_base66; %Arm resistance in per-unit.
%% Controller settings
%%Rectifier Parameters:
Kp_Ireg_r = 2; %Parameter of Inner current control.
Ki_Ireg_r = 100; %Parameter of Inner current control.
Ireg_lim_r = [1.5, -1.5]; %Limit control for current loop.
Kp_DCreg_r = 8; %Outer voltage controller for rectifier.
Ki_DCreg_r = 150; %Outer voltage controller for rectifier.
DC_lim = [1.05 -1.05]; %Limits for DC regulator (Maximum current allowed).
%%Inverter Parameters:
Kp_Ireg_i = 2; %Parameter of Inner current control.
Ki_Ireg_i = 200; %Parameter of Inner current control.
Ireg_lim_i = [1.5, -1.5]; %Limit control for current loop.
V_ac_ref = 1.035; %voltage reference for load in p.u.
Kp_ACreg_i = 2; %Outer voltage controller for rectifier.
Ki_ACreg_i = 260; %Outer voltage controller for rectifier.
AC_lim = [1.5 -1.5]; %Limits for AC voltage regulator.
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]王霖.基于模块化多电平变流器的柔性高压直流输电系统研究[D].中国科学院大学,2014.
[2]姚骏,谭义,裴金鑫,等.模块化多电平变流器高压直流输电系统直流故障改进控制策略简[J].电工技术学报, 2018, 33(14):13.DOI:10.19595/j.cnki.1000-6753.tces.170614.
[3]ZHAO Cong,赵聪,LI Yaohua,等.适合于柔性高压直流输电系统的模块化多电平变流器的自适应均压方法[C]//北京电力电子学会2017电力电子论坛.0[2023-12-07].















 1491
1491











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









