









 该博客介绍了如何使用Python和OpenCV库进行透视变换,将倾斜的四边形图像矫正为矩形。通过二值化、滤波、膨胀、腐蚀等图像处理步骤找到图像轮廓,拟合四边形并进行透视变换。提供了自动寻找角点和手动输入角点两种方法,并展示了变换前后的图像效果。
该博客介绍了如何使用Python和OpenCV库进行透视变换,将倾斜的四边形图像矫正为矩形。通过二值化、滤波、膨胀、腐蚀等图像处理步骤找到图像轮廓,拟合四边形并进行透视变换。提供了自动寻找角点和手动输入角点两种方法,并展示了变换前后的图像效果。
python opencv 实现透视变换——将侧视图进行正投影
这个方法可以将倾斜拍摄的四边形图片投影成矩形,在图像处理工程里经常要用,之前写过一个C语言版本的,可以搜我博客:透视变换
但是python语言版本的比较少,根据网上一些资料总结了一下。
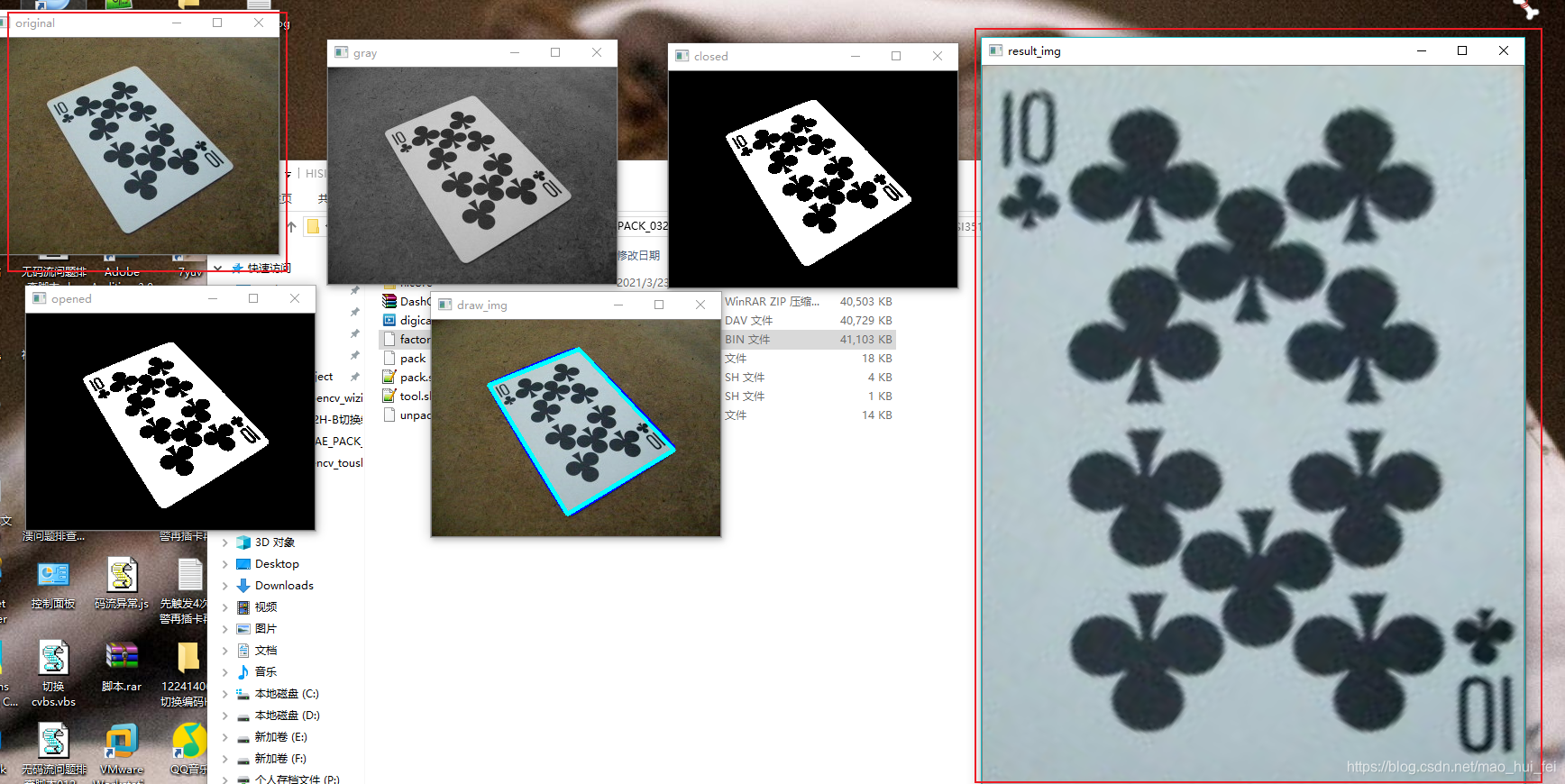
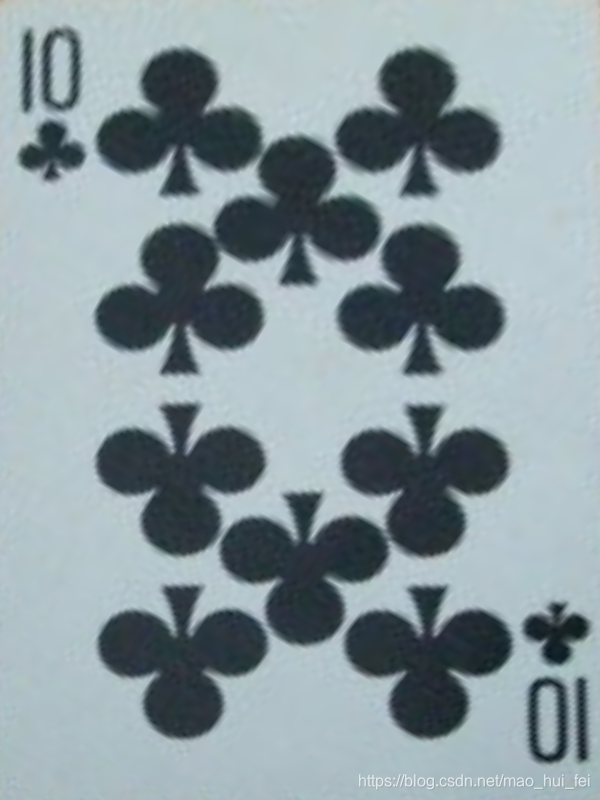
废话不多说,直接上效果图。
效果图
原图
运行demo用,加深理解

代码
代码1——自动找四边形角点,然后透视变化
思路:
二值化——滤波——膨胀——腐蚀——找最外边轮廓——拟合四边形——四个顶点映射——透视变换
#(基于透视的图像矫正)
import cv2
import math
import numpy as np
def Img_Outline(input_dir):
original_img = cv2.imread(input_dir)
gray_img = cv2.cvtColor(original_img, cv2.COLOR_BGR2GRAY)
blurred = cv2.GaussianBlur(gray_img, (1, 1), 0) # 高斯模糊去噪(设定卷积核大小影响效果)
_, RedThresh = cv2.threshold(blurred, 165, 255, cv2.THRESH_BINARY) # 设定阈值165(阈值影响开闭运算效果)
kernel = cv2.getStructuringElement(cv2.MORPH_RECT, (1, 1)) # 定义矩形结构元素
closed = cv2.morphologyEx(RedThresh, cv2.MORPH_CLOSE, kernel) # 闭运算(链接块)
opened = cv2.morphologyEx(closed, cv2.MORPH_OPEN, kernel) # 开运算(去噪点)
return original_img, gray_img, RedThresh, closed, opened
def findContours_img(original_img, opened):
contours, hierarchy = cv2.findContours(opened, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
#c = sorted(contours, key=cv2.contourArea, reverse=True)[1] # 计算最大轮廓的旋转包围盒
#rect = cv2.minAreaRect(c) # 获取包围盒(中心点,宽高,旋转角度)
#box = np.int0(cv2.boxPoints(rect)) # box
#box[]
#draw_img = cv2.drawContours(original_img.copy(), [box], -1, (0, 0, 255), 3)
draw_img=original_img.copy()
cv2.drawContours(draw_img, contours, -1, (255, 0, 0), 2)
#拟合四边形
cnt_len = cv2.arcLength(contours[0], True)
box = cv2.approxPolyDP(contours[0], 0.02 * cnt_len, True)
if len(box) == 4:
cv2.drawContours(draw_img, [box], -1, (255, 255, 0), 3)
'''
box[0]: [[163 32]]右上
box[1]: [[63 72]] 左上
box[2]: [[150 215]]左下
box[3]: [[268 144]]右下
'''
print("box[0]:", box[0])
print("box[1]:", box[1])
print("box[2]:", box[2])
print("box[3]:", box[3])
# for i in range(len(box)):
# box_after[i]=box[3-i]
box_after =[0]*4
#排好序的角点输出,0号是左上角,顺时针输出
box_after[0] = box[1]
box_after[1] = box[0]
box_after[2] = box[3]
box_after[3] = box[2]
print("box_after[0]:", box_after[0])
print("box_after[1]:", box_after[1])
print("box_after[2]:", box_after[2])
print("box_after[3]:", box_after[3])
return box_after,draw_img
#return draw_img
def Perspective_transform(box,original_img):
# # 获取画框宽高(x=orignal_W,y=orignal_H)
# orignal_W = math.ceil(np.sqrt((box[3][1] - box[2][1])**2 + (box[3][0] - box[2][0])**2))
# orignal_H= math.ceil(np.sqrt((box[3][1] - box[0][1])**2 + (box[3][0] - box[0][0])**2))
#
# # 原图中的四个顶点,与变换矩阵
# pts1 = np.float32([box[0], box[1], box[2], box[3]])
# pts2 = np.float32([[int(orignal_W+1),int(orignal_H+1)], [0, int(orignal_H+1)], [0, 0], [int(orignal_W+1), 0]])
#
# # 生成透视变换矩阵;进行透视变换
# M = cv2.getPerspectiveTransform(pts1, pts2)
# result_img = cv2.warpPerspective(original_img, M, (int(orignal_W+3),int(orignal_H+1)))
#
ROTATED_SIZE_W = 600 # 透视变换后的表盘图像大小
ROTATED_SIZE_H = 800 # 透视变换后的表盘图像大小
# 原图中书本的四个角点(左上、右上、右下、左下),与变换后矩阵位置
#pts1 = np.float32([[63, 72], [163, 32], [268, 144], [150, 215]])
pts1 = np.float32([box[0], box[1], box[2], box[3]])
# 变换后矩阵位置
pts2 = np.float32([[0, 0], [ROTATED_SIZE_W, 0], [ROTATED_SIZE_W, ROTATED_SIZE_H], [0, ROTATED_SIZE_H], ])
# 生成透视变换矩阵;进行透视变换
M = cv2.getPerspectiveTransform(pts1, pts2)
result_img = cv2.warpPerspective(original_img, M, (ROTATED_SIZE_W, ROTATED_SIZE_H))
return result_img
if __name__=="__main__":
input_dir = "./1.jpg"
original_img, gray_img, RedThresh, closed, opened = Img_Outline(input_dir)
box, draw_img = findContours_img(original_img,opened)
#draw_img = findContours_img(original_img, opened)
result_img = Perspective_transform(box,original_img)
cv2.imshow("original", original_img)
cv2.imshow("gray", gray_img)
cv2.imshow("closed", closed)
cv2.imshow("opened", opened)
cv2.imshow("draw_img", draw_img)
cv2.imshow("result_img", result_img)
cv2.waitKey(0)
cv2.destroyAllWindows()
代码2——手动输入四个角点,然后进行透视变换
'''
box[0]: [[163 32]]右上
box[1]: [[63 72]] 左上
box[2]: [[150 215]]左下
box[3]: [[268 144]]右下
'''
import cv2
import numpy as np
import matplotlib.pyplot as plt
img = cv2.imread('1.jpg')
ROTATED_SIZE = 600 #透视变换后的表盘图像大小
CUT_SIZE = 0 #透视变换时四周裁剪长度
W_cols, H_rows= img.shape[:2]
print(H_rows, W_cols)
# 原图中书本的四个角点(左上、右上、右下、左下),与变换后矩阵位置,排好序的角点输出,0号是左上角,顺时针输出
pts1 = np.float32([[63, 72], [163, 32], [268, 144], [150, 215]])
#变换后矩阵位置
pts2 = np.float32([[0, 0],[ROTATED_SIZE,0],[ROTATED_SIZE, ROTATED_SIZE],[0,ROTATED_SIZE],])
# 生成透视变换矩阵;进行透视变换
M = cv2.getPerspectiveTransform(pts1, pts2)
dst = cv2.warpPerspective(img, M, (ROTATED_SIZE,ROTATED_SIZE))
cv2.imshow("original_img",img)
cv2.imshow("result",dst)
cv2.waitKey(0)
cv2.destroyAllWindows()
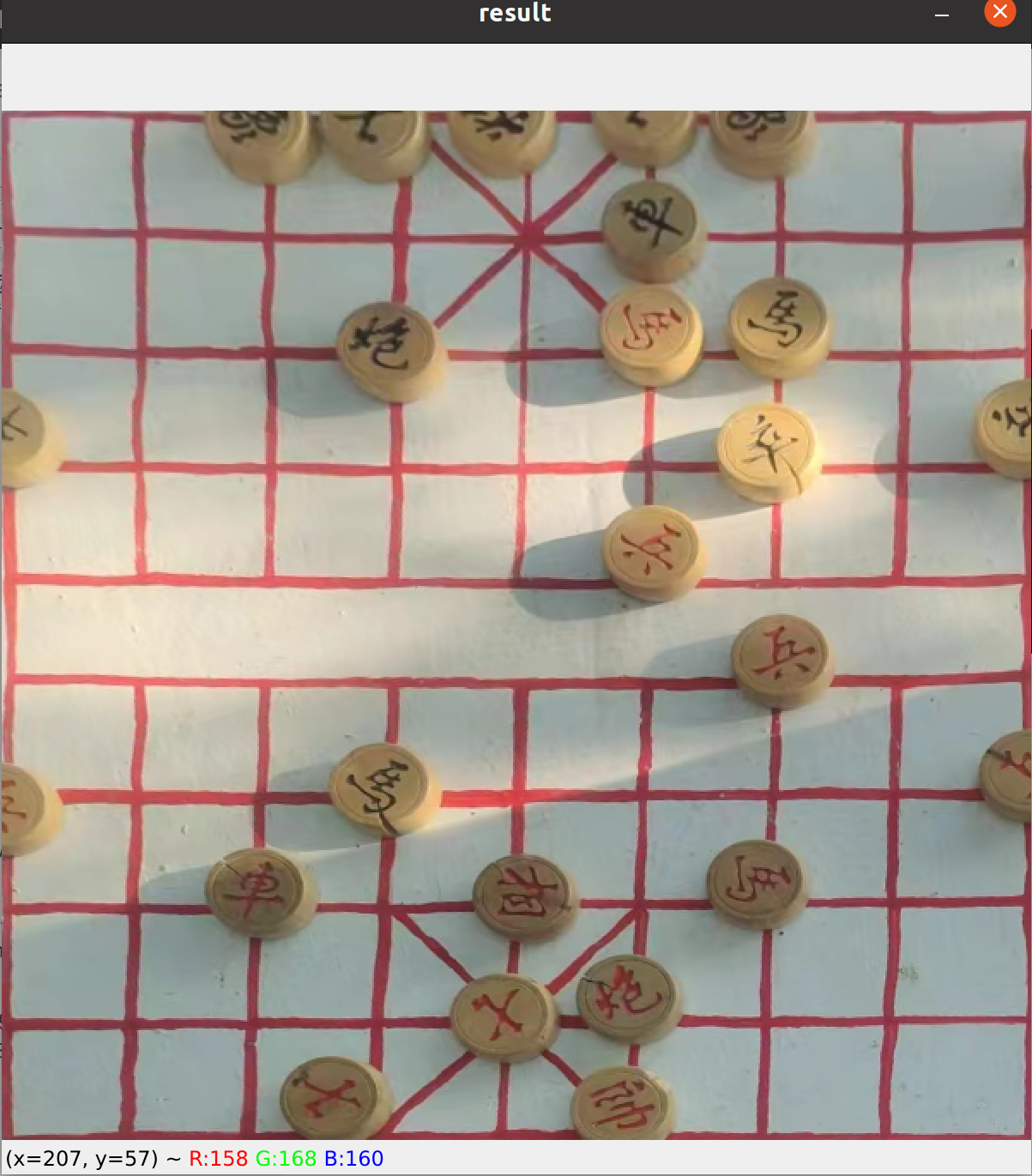
中国象棋

'''
box[0]: [[163 32]]右上
box[1]: [[63 72]] 左上
box[2]: [[150 215]]左下
box[3]: [[268 144]]右下
'''
import cv2
import numpy as np
import matplotlib.pyplot as plt
img = cv2.imread('1fd65f577cd8a38830e86cd855c3be1.jpg')
ROTATED_SIZE = 600 #透视变换后的表盘图像大小
CUT_SIZE = 0 #透视变换时四周裁剪长度
W_cols, H_rows= img.shape[:2]
print(H_rows, W_cols)
# 原图中书本的四个角点(左上、右上、右下、左下),与变换后矩阵位置,排好序的角点输出,0号是左上角,顺时针输出
pts1 = np.float32([[328, 408], [928, 416], [867, 1211], [122, 1107]])
#变换后矩阵位置
pts2 = np.float32([[0, 0],[ROTATED_SIZE,0],[ROTATED_SIZE, ROTATED_SIZE],[0,ROTATED_SIZE],])
# 生成透视变换矩阵;进行透视变换
M = cv2.getPerspectiveTransform(pts1, pts2)
dst = cv2.warpPerspective(img, M, (ROTATED_SIZE,ROTATED_SIZE))
cv2.namedWindow("original_img",0)
cv2.imshow("original_img",img)
cv2.namedWindow("result_img",0)
cv2.imshow("result",dst)
cv2.waitKey(1000)
cv2.waitKey(0)
cv2.destroyAllWindows()
参考文章;
1、Python-Opencv基于透视变换的图像矫正
2、opencv 四边形拟合_谈谈OpenCV中的四边形


















 893
893

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











