



 本文详细介绍了计算机视觉中两种常见的相机畸变模型——Brown-Conrady模型和Kanala-Brandt模型,以及点去畸变的迭代方法。Brown-Conrady模型用于常规镜头,包含径向和切向畸变,而Kanala-Brandt模型针对鱼眼镜头设计,基于入射角的多项式拟合。文章还提供了Matlab实现示例,展示如何进行去畸变处理。
本文详细介绍了计算机视觉中两种常见的相机畸变模型——Brown-Conrady模型和Kanala-Brandt模型,以及点去畸变的迭代方法。Brown-Conrady模型用于常规镜头,包含径向和切向畸变,而Kanala-Brandt模型针对鱼眼镜头设计,基于入射角的多项式拟合。文章还提供了Matlab实现示例,展示如何进行去畸变处理。
介绍
本文介绍计算机视觉中常用的两种相机畸变模型:Brown-Conrady畸变模型和Kanala-Brandt畸变模型,以及点去畸变的迭代方法及其Matlab实现。
Brown/Brown-Conrady畸变模型
畸变模型
Brown-Conrady模型中,无畸变点坐标
(
x
,
y
)
(x,y)
(x,y)到畸变点坐标
(
x
d
,
y
d
)
(x_d,y_d)
(xd,yd)的变换关系表示为:
r
2
=
x
2
+
y
2
x
d
=
x
(
1
+
k
1
r
2
+
k
2
r
4
+
k
3
r
6
1
+
k
4
r
2
+
k
5
r
4
+
k
6
r
6
)
+
2
p
1
x
y
+
p
2
(
r
2
+
2
x
2
)
y
d
=
y
(
1
+
k
1
r
2
+
k
2
r
4
+
k
3
r
6
1
+
k
4
r
2
+
k
5
r
4
+
k
6
r
6
)
+
p
1
(
r
2
+
2
y
2
)
+
2
p
2
x
y
r^2=x^2+y^2\\x_d=x(\frac{1+k_1r^2+k_2r^4+k_3r^6}{1+k_4r^2+k_5r^4+k_6r^6})+2p_1xy+p_2(r^2+2x^2)\\y_d=y(\frac{1+k_1r^2+k_2r^4+k_3r^6}{1+k_4r^2+k_5r^4+k_6r^6})+p_1(r^2+2y^2)+2p_2xy
r2=x2+y2xd=x(1+k4r2+k5r4+k6r61+k1r2+k2r4+k3r6)+2p1xy+p2(r2+2x2)yd=y(1+k4r2+k5r4+k6r61+k1r2+k2r4+k3r6)+p1(r2+2y2)+2p2xy其中,
x
(
1
+
k
1
r
2
+
k
2
r
4
+
k
3
r
6
1
+
k
4
r
2
+
k
5
r
4
+
k
6
r
6
)
x(\frac{1+k_1r^2+k_2r^4+k_3r^6}{1+k_4r^2+k_5r^4+k_6r^6})
x(1+k4r2+k5r4+k6r61+k1r2+k2r4+k3r6)和
y
(
1
+
k
1
r
2
+
k
2
r
4
+
k
3
r
6
1
+
k
4
r
2
+
k
5
r
4
+
k
6
r
6
)
y(\frac{1+k_1r^2+k_2r^4+k_3r^6}{1+k_4r^2+k_5r^4+k_6r^6})
y(1+k4r2+k5r4+k6r61+k1r2+k2r4+k3r6)为径向畸变项,
k
1
,
k
2
,
k
3
,
k
4
,
k
5
,
k
6
k_1,k_2,k_3,k_4,k_5,k_6
k1,k2,k3,k4,k5,k6为径向畸变系数;
2
p
1
x
y
+
p
2
(
r
2
+
2
x
2
)
2p_1xy+p_2(r^2+2x^2)
2p1xy+p2(r2+2x2)和
p
1
(
r
2
+
2
y
2
)
+
2
p
2
x
y
p_1(r^2+2y^2)+2p_2xy
p1(r2+2y2)+2p2xy为切向畸变项,
p
1
,
p
2
p_1,p_2
p1,p2为切向畸变系数(注:这个畸变项通常称为切向畸变,但实际畸变方向并非沿切向,也有径向成分。这个畸变项实际是失心畸变,表示镜头光轴与图像靶面不垂直引入的畸变,至于为什么是这个形式可以参阅文献【3】(很难看懂-.-),失心畸变后来由Brown引入计算机视觉领域,参阅文献【4-5】)。
常规镜头畸变较小,Brown-Conrady模型的径向畸变系数通常使用至
k
2
k_2
k2或
k
3
k_3
k3;对于大视场角镜头或鱼眼镜头,径向畸变系数需使用至
k
6
k_6
k6以保证边缘拟合效果。
点去畸变
现已知
(
x
d
,
y
d
)
(x_d,y_d)
(xd,yd)和畸变参数,想要得到
(
x
,
y
)
(x,y)
(x,y),需要通过迭代求解,迭代过程如下
初值:
x
0
=
x
d
y
0
=
y
d
x_0=x_d\\y_0=y_d
x0=xdy0=yd迭代公式(固定点迭代):
x
n
+
1
=
[
x
d
−
2
p
1
x
n
y
n
−
p
2
(
r
n
2
+
2
x
n
2
)
]
⋅
1
+
k
4
r
n
2
+
k
5
r
n
4
+
k
6
r
n
6
1
+
k
1
r
n
2
+
k
2
r
n
4
+
k
3
r
n
6
y
n
+
1
=
[
y
d
−
p
1
(
r
n
2
+
2
y
n
2
)
−
2
p
2
x
n
y
n
]
⋅
1
+
k
4
r
n
2
+
k
5
r
n
4
+
k
6
r
n
6
1
+
k
1
r
n
2
+
k
2
r
n
4
+
k
3
r
n
6
x_{n+1}=[x_d-2p_1x_ny_n-p_2(r_n^2+2x_n^2)]\cdot\frac{1+k_4r_n^2+k_5r_n^4+k_6r_n^6}{1+k_1r_n^2+k_2r_n^4+k_3r_n^6}\\y_{n+1}=[y_d-p_1(r_n^2+2y_n^2)-2p_2x_ny_n]\cdot\frac{1+k_4r_n^2+k_5r_n^4+k_6r_n^6}{1+k_1r_n^2+k_2r_n^4+k_3r_n^6}
xn+1=[xd−2p1xnyn−p2(rn2+2xn2)]⋅1+k1rn2+k2rn4+k3rn61+k4rn2+k5rn4+k6rn6yn+1=[yd−p1(rn2+2yn2)−2p2xnyn]⋅1+k1rn2+k2rn4+k3rn61+k4rn2+k5rn4+k6rn6
Matlab实现
clear
clc
% 设定图像大小
w = 640;
h = 480;
% 设定焦距
fx = 500;
fy = 500;
% 设定主点
cx = (w-1)/2;
cy = (h-1)/2;
% 随机生成畸变
rng(100); %随机数种子
k1 = 0.1*randn(1);
k2 = 0.1*randn(1);
k3 = 0.1*randn(1);
k4 = 0.1*randn(1);
k5 = 0.1*randn(1);
k6 = 0.1*randn(1);
p1 = 0.001*randn(1);
p2 = 0.001*randn(1);
% 迭代次数
iter_num = 30;
% 采样步长,为了减少绘图点的密度
sampling_step = 8;
% 生成xd、yd
[ud, vd] = meshgrid(0:sampling_step:w-1,0:sampling_step:h-1);
xd = (ud-cx)/fx;
yd = (vd-cy)/fy;
% 去畸变迭代
x = xd;
y = yd;
for i = 1:iter_num
r2 = x.^2+y.^2;
x = (xd-(p1*(2*x.*y)+p2*(r2+2*x.^2)))./(1+k1*r2+k2*r2.^2+k3*r2.^3).*(1+k4*r2+k5*r2.^2+k6*r2.^3);
y = (yd-(p1*(r2+2*y.^2)+p2*(2*x.*y)))./(1+k1*r2+k2*r2.^2+k3*r2.^3).*(1+k4*r2+k5*r2.^2+k6*r2.^3);
end
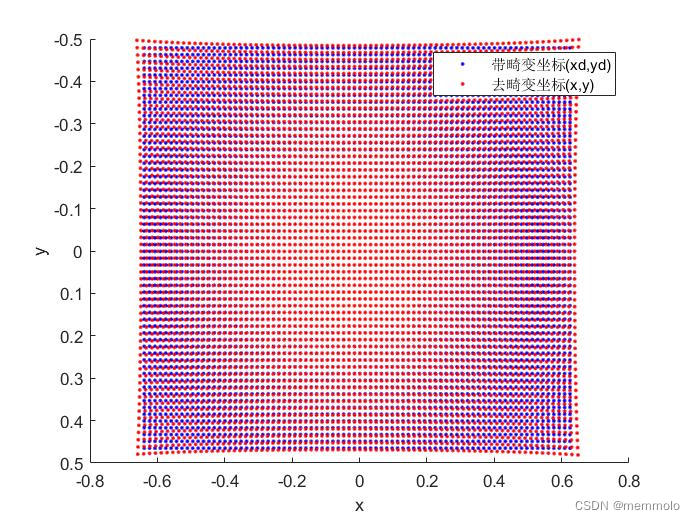
% 绘图
figure, hold on
scatter(xd(:),yd(:),'b.')
scatter(x(:),y(:),'r.')
legend('带畸变坐标(xd,yd)','去畸变坐标(x,y)')
axis ij
xlabel('x')
ylabel('y')
KB/Kanala-Brandt畸变模型
畸变模型
对于理想的透视投影,或者一个无畸变的镜头,光线入射角
θ
\theta
θ与其最终投影在相机靶面位置
D
D
D的关系可以表示为
D
=
f
tan
(
θ
)
D=f\tan(\theta)
D=ftan(θ)其中,
f
f
f为镜头的物理焦距。可以看出,相机靶面大小固定时,焦距越小,可以拍摄的视场越大,因此大视场角镜头通常为短焦镜头。当焦距也固定时,想要拍摄大的视场,则需要通过改变镜头设计,改变
θ
\theta
θ与
D
D
D的映射关系,来增大视场。
鱼眼镜头为了拍摄更大视场角,常遵循以下几种设计准则
- 等距投影(equidistance projection): D = f θ D=f\theta D=fθ
- 立体投影(stereographic projection): D = 2 f tan ( θ / 2 ) D=2f\tan(\theta/2) D=2ftan(θ/2)
- 等立体角投影(equisolid angle projection): D = 2 f sin ( θ / 2 ) D=2f\sin(\theta/2) D=2fsin(θ/2)
- 正交投影(orthogonal projection): D = f sin ( θ ) D=f\sin(\theta) D=fsin(θ)
用 r r r表示理想透视投影中归一化平面坐标,则有 r = D / f = tan ( θ ) r=D/f=\tan(\theta) r=D/f=tan(θ)以等距投影为例,畸变坐标 r d r_d rd与 r r r的关系表示为 r d = θ = arctan ( r ) r_d=\theta=\arctan(r) rd=θ=arctan(r)若继续按照Brown畸变模型中的多项式 r d = r + k 1 r 3 + k 2 r 5 + . . . r_d=r+k_1r^3+k_2r^5+... rd=r+k1r3+k2r5+...进行拟合,由于 arctan ( r ) \arctan(r) arctan(r)的展开特性,只使用少量系数拟合的话,图像边缘的拟合效果是非常差的。所以Brown-Conrady模型采用了如下拟合方式 r d = r 1 + k 1 r 2 + k 2 r 4 + k 3 r 6 1 + k 4 r 2 + k 5 r 4 + k 6 r 6 r_d= r\frac{1+ k_1r^2+k_2r^4+k_3r^6}{1+ k_4r^2+k_5r^4+k_6r^6} rd=r1+k4r2+k5r4+k6r61+k1r2+k2r4+k3r6进行改进。而Kanala-Brandt模型则不同,研究者注意到鱼眼镜头的设计特点,使用 θ \theta θ的多项式而非 r r r的多项式进行拟合 r d = θ + k 1 θ 3 + k 2 θ 5 + . . . r_d = \theta+k_1\theta^3+k_2\theta^5+... rd=θ+k1θ3+k2θ5+...因此Kanala-Brandt模型中,无畸变点坐标 ( x , y ) (x,y) (x,y)到畸变点坐标 ( x d , y d ) (x_d,y_d) (xd,yd)的变换关系表示为: r 2 = x 2 + y 2 θ = a t a n ( r ) r d = θ ( 1 + k 1 θ 2 + k 2 θ 4 + k 3 θ 6 + k 4 θ 8 ) x d = r d ⋅ x / r y d = r d ⋅ y / r r^2=x^2+y^2\\\theta = atan(r)\\r_d=\theta(1+k_1\theta^2+k_2\theta^4+k_3\theta^6+k_4\theta^8)\\x_d=r_d\cdot x/r\\y_d=r_d\cdot y/r r2=x2+y2θ=atan(r)rd=θ(1+k1θ2+k2θ4+k3θ6+k4θ8)xd=rd⋅x/ryd=rd⋅y/r
点去畸变
初值: θ 0 = r d \theta_0=r_d θ0=rd迭代公式(牛顿法): θ n + 1 = θ n − Δ θ n Δ θ n = θ n + k 1 θ n 3 + k 2 θ n 5 + k 3 θ n 7 + k 4 θ n 9 − r d 1 + 3 k 1 θ n 2 + 5 k 2 θ n 4 + 7 k 3 θ n 6 + 9 k 4 θ n 8 \theta_{n+1}=\theta_n-\Delta\theta_n\\\Delta\theta_n=\frac{\theta_n+k_1\theta_n^3+k_2\theta_n^5+k_3\theta_n^7+k_4\theta_n^9-r_d}{1+3k_1\theta_n^2+5k_2\theta_n^4+7k_3\theta_n^6+9k_4\theta_n^8} θn+1=θn−ΔθnΔθn=1+3k1θn2+5k2θn4+7k3θn6+9k4θn8θn+k1θn3+k2θn5+k3θn7+k4θn9−rd去畸变坐标为: x = x d r d tan ( θ ) y = y d r d tan ( θ ) x=\frac{x_d}{r_d}\tan(\theta)\\y=\frac{y_d}{r_d}\tan(\theta) x=rdxdtan(θ)y=rdydtan(θ)
Matlab实现
clear
clc
% 设定图像大小
w = 640;
h = 480;
% 设定焦距
fx = 250;
fy = 250;
% 设定主点
cx = (w-1)/2;
cy = (h-1)/2;
% 随机生成畸变
rng(100); %随机数种子
k1 = 0.1*randn(1);
k2 = 0.1*randn(1);
k3 = 0.1*randn(1);
k4 = 0.1*randn(1);
% 迭代次数
iter_num = 30;
% 采样步长,为了减少绘图点的密度
sampling_step = 8;
% 生成xd、yd
[ud, vd] = meshgrid(0:sampling_step:w-1,0:sampling_step:h-1);
xd = (ud-cx)/fx;
yd = (vd-cy)/fy;
% 去畸变迭代
rd = sqrt(xd.^2+yd.^2);
theta = rd;
for i=1:iter_num
theta_fix = (theta+k1*theta.^3+k2*theta.^5+k3*theta.^7+k4*theta.^9-rd)./...
(1+3*k1*theta.^2+5*k2*theta.^4+7*k3*theta.^6+9*k4*theta.^8);
theta = theta-theta_fix;
end
scale = tan(theta)./rd;
x = xd.*scale;
y = yd.*scale;
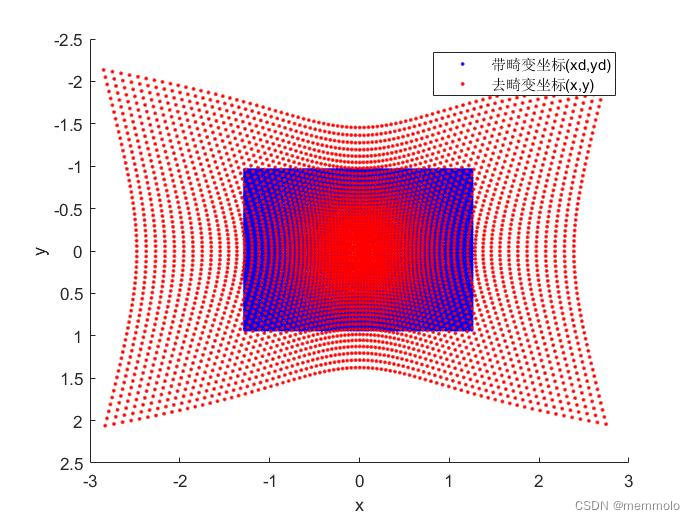
% 绘图
figure, hold on
scatter(xd(:),yd(:),'b.')
scatter(x(:),y(:),'r.')
legend('带畸变坐标(xd,yd)','去畸变坐标(x,y)')
axis ij
xlabel('x')
ylabel('y')
OpenCV去畸变程序
这里补充OpenCV4.9去畸变程序作为参考。
Brown/Brown-Conrady畸变模型
static void cvUndistortPointsInternal( const CvMat* _src, CvMat* _dst, const CvMat* _cameraMatrix,
const CvMat* _distCoeffs,
const CvMat* matR, const CvMat* matP, cv::TermCriteria criteria)
{
CV_Assert(criteria.isValid());
double A[3][3], RR[3][3], k[14]={0,0,0,0,0,0,0,0,0,0,0,0,0,0};
CvMat matA=cvMat(3, 3, CV_64F, A), _Dk;
CvMat _RR=cvMat(3, 3, CV_64F, RR);
cv::Matx33d invMatTilt = cv::Matx33d::eye();
cv::Matx33d matTilt = cv::Matx33d::eye();
CV_Assert( CV_IS_MAT(_src) && CV_IS_MAT(_dst) &&
(_src->rows == 1 || _src->cols == 1) &&
(_dst->rows == 1 || _dst->cols == 1) &&
_src->cols + _src->rows - 1 == _dst->rows + _dst->cols - 1 &&
(CV_MAT_TYPE(_src->type) == CV_32FC2 || CV_MAT_TYPE(_src->type) == CV_64FC2) &&
(CV_MAT_TYPE(_dst->type) == CV_32FC2 || CV_MAT_TYPE(_dst->type) == CV_64FC2));
CV_Assert( CV_IS_MAT(_cameraMatrix) &&
_cameraMatrix->rows == 3 && _cameraMatrix->cols == 3 );
cvConvert( _cameraMatrix, &matA );
if( _distCoeffs )
{
CV_Assert( CV_IS_MAT(_distCoeffs) &&
(_distCoeffs->rows == 1 || _distCoeffs->cols == 1) &&
(_distCoeffs->rows*_distCoeffs->cols == 4 ||
_distCoeffs->rows*_distCoeffs->cols == 5 ||
_distCoeffs->rows*_distCoeffs->cols == 8 ||
_distCoeffs->rows*_distCoeffs->cols == 12 ||
_distCoeffs->rows*_distCoeffs->cols == 14));
_Dk = cvMat( _distCoeffs->rows, _distCoeffs->cols,
CV_MAKETYPE(CV_64F,CV_MAT_CN(_distCoeffs->type)), k);
cvConvert( _distCoeffs, &_Dk );
if (k[12] != 0 || k[13] != 0)
{
cv::detail::computeTiltProjectionMatrix<double>(k[12], k[13], NULL, NULL, NULL, &invMatTilt);
cv::detail::computeTiltProjectionMatrix<double>(k[12], k[13], &matTilt, NULL, NULL);
}
}
if( matR )
{
CV_Assert( CV_IS_MAT(matR) && matR->rows == 3 && matR->cols == 3 );
cvConvert( matR, &_RR );
}
else
cvSetIdentity(&_RR);
if( matP )
{
double PP[3][3];
CvMat _P3x3, _PP=cvMat(3, 3, CV_64F, PP);
CV_Assert( CV_IS_MAT(matP) && matP->rows == 3 && (matP->cols == 3 || matP->cols == 4));
cvConvert( cvGetCols(matP, &_P3x3, 0, 3), &_PP );
cvMatMul( &_PP, &_RR, &_RR );
}
const CvPoint2D32f* srcf = (const CvPoint2D32f*)_src->data.ptr;
const CvPoint2D64f* srcd = (const CvPoint2D64f*)_src->data.ptr;
CvPoint2D32f* dstf = (CvPoint2D32f*)_dst->data.ptr;
CvPoint2D64f* dstd = (CvPoint2D64f*)_dst->data.ptr;
int stype = CV_MAT_TYPE(_src->type);
int dtype = CV_MAT_TYPE(_dst->type);
int sstep = _src->rows == 1 ? 1 : _src->step/CV_ELEM_SIZE(stype);
int dstep = _dst->rows == 1 ? 1 : _dst->step/CV_ELEM_SIZE(dtype);
double fx = A[0][0];
double fy = A[1][1];
double ifx = 1./fx;
double ify = 1./fy;
double cx = A[0][2];
double cy = A[1][2];
int n = _src->rows + _src->cols - 1;
for( int i = 0; i < n; i++ )
{
double x, y, x0 = 0, y0 = 0, u, v;
if( stype == CV_32FC2 )
{
x = srcf[i*sstep].x;
y = srcf[i*sstep].y;
}
else
{
x = srcd[i*sstep].x;
y = srcd[i*sstep].y;
}
u = x; v = y;
x = (x - cx)*ifx;
y = (y - cy)*ify;
if( _distCoeffs ) {
// compensate tilt distortion
cv::Vec3d vecUntilt = invMatTilt * cv::Vec3d(x, y, 1);
double invProj = vecUntilt(2) ? 1./vecUntilt(2) : 1;
x0 = x = invProj * vecUntilt(0);
y0 = y = invProj * vecUntilt(1);
double error = std::numeric_limits<double>::max();
// compensate distortion iteratively
// 去畸变核心代码
for( int j = 0; ; j++ )
{
if ((criteria.type & cv::TermCriteria::COUNT) && j >= criteria.maxCount)
break;
if ((criteria.type & cv::TermCriteria::EPS) && error < criteria.epsilon)
break;
double r2 = x*x + y*y;
double icdist = (1 + ((k[7]*r2 + k[6])*r2 + k[5])*r2)/(1 + ((k[4]*r2 + k[1])*r2 + k[0])*r2);
if (icdist < 0) // test: undistortPoints.regression_14583
{
x = (u - cx)*ifx;
y = (v - cy)*ify;
break;
}
double deltaX = 2*k[2]*x*y + k[3]*(r2 + 2*x*x)+ k[8]*r2+k[9]*r2*r2;
double deltaY = k[2]*(r2 + 2*y*y) + 2*k[3]*x*y+ k[10]*r2+k[11]*r2*r2;
x = (x0 - deltaX)*icdist;
y = (y0 - deltaY)*icdist;
if(criteria.type & cv::TermCriteria::EPS)
{
double r4, r6, a1, a2, a3, cdist, icdist2;
double xd, yd, xd0, yd0;
cv::Vec3d vecTilt;
r2 = x*x + y*y;
r4 = r2*r2;
r6 = r4*r2;
a1 = 2*x*y;
a2 = r2 + 2*x*x;
a3 = r2 + 2*y*y;
cdist = 1 + k[0]*r2 + k[1]*r4 + k[4]*r6;
icdist2 = 1./(1 + k[5]*r2 + k[6]*r4 + k[7]*r6);
xd0 = x*cdist*icdist2 + k[2]*a1 + k[3]*a2 + k[8]*r2+k[9]*r4;
yd0 = y*cdist*icdist2 + k[2]*a3 + k[3]*a1 + k[10]*r2+k[11]*r4;
vecTilt = matTilt*cv::Vec3d(xd0, yd0, 1);
invProj = vecTilt(2) ? 1./vecTilt(2) : 1;
xd = invProj * vecTilt(0);
yd = invProj * vecTilt(1);
double x_proj = xd*fx + cx;
double y_proj = yd*fy + cy;
error = sqrt( pow(x_proj - u, 2) + pow(y_proj - v, 2) );
}
}
}
double xx = RR[0][0]*x + RR[0][1]*y + RR[0][2];
double yy = RR[1][0]*x + RR[1][1]*y + RR[1][2];
double ww = 1./(RR[2][0]*x + RR[2][1]*y + RR[2][2]);
x = xx*ww;
y = yy*ww;
if( dtype == CV_32FC2 )
{
dstf[i*dstep].x = (float)x;
dstf[i*dstep].y = (float)y;
}
else
{
dstd[i*dstep].x = x;
dstd[i*dstep].y = y;
}
}
}
KB/Kanala-Brandt畸变模型
void cv::fisheye::undistortPoints( InputArray distorted, OutputArray undistorted, InputArray K, InputArray D,
InputArray R, InputArray P, TermCriteria criteria)
{
CV_INSTRUMENT_REGION();
// will support only 2-channel data now for points
CV_Assert(distorted.type() == CV_32FC2 || distorted.type() == CV_64FC2);
undistorted.create(distorted.size(), distorted.type());
CV_Assert(P.empty() || P.size() == Size(3, 3) || P.size() == Size(4, 3));
CV_Assert(R.empty() || R.size() == Size(3, 3) || R.total() * R.channels() == 3);
CV_Assert(D.total() == 4 && K.size() == Size(3, 3) && (K.depth() == CV_32F || K.depth() == CV_64F));
CV_Assert(criteria.isValid());
cv::Vec2d f, c;
if (K.depth() == CV_32F)
{
Matx33f camMat = K.getMat();
f = Vec2f(camMat(0, 0), camMat(1, 1));
c = Vec2f(camMat(0, 2), camMat(1, 2));
}
else
{
Matx33d camMat = K.getMat();
f = Vec2d(camMat(0, 0), camMat(1, 1));
c = Vec2d(camMat(0, 2), camMat(1, 2));
}
Vec4d k = D.depth() == CV_32F ? (Vec4d)*D.getMat().ptr<Vec4f>(): *D.getMat().ptr<Vec4d>();
cv::Matx33d RR = cv::Matx33d::eye();
if (!R.empty() && R.total() * R.channels() == 3)
{
cv::Vec3d rvec;
R.getMat().convertTo(rvec, CV_64F);
RR = cv::Affine3d(rvec).rotation();
}
else if (!R.empty() && R.size() == Size(3, 3))
R.getMat().convertTo(RR, CV_64F);
if(!P.empty())
{
cv::Matx33d PP;
P.getMat().colRange(0, 3).convertTo(PP, CV_64F);
RR = PP * RR;
}
// start undistorting
const cv::Vec2f* srcf = distorted.getMat().ptr<cv::Vec2f>();
const cv::Vec2d* srcd = distorted.getMat().ptr<cv::Vec2d>();
cv::Vec2f* dstf = undistorted.getMat().ptr<cv::Vec2f>();
cv::Vec2d* dstd = undistorted.getMat().ptr<cv::Vec2d>();
size_t n = distorted.total();
int sdepth = distorted.depth();
const bool isEps = (criteria.type & TermCriteria::EPS) != 0;
/* Define max count for solver iterations */
int maxCount = std::numeric_limits<int>::max();
if (criteria.type & TermCriteria::MAX_ITER) {
maxCount = criteria.maxCount;
}
for(size_t i = 0; i < n; i++ )
{
Vec2d pi = sdepth == CV_32F ? (Vec2d)srcf[i] : srcd[i]; // image point
Vec2d pw((pi[0] - c[0])/f[0], (pi[1] - c[1])/f[1]); // world point
double theta_d = sqrt(pw[0]*pw[0] + pw[1]*pw[1]);
// the current camera model is only valid up to 180 FOV
// for larger FOV the loop below does not converge
// clip values so we still get plausible results for super fisheye images > 180 grad
theta_d = min(max(-CV_PI/2., theta_d), CV_PI/2.);
bool converged = false;
double theta = theta_d;
double scale = 0.0;
if (!isEps || fabs(theta_d) > criteria.epsilon)
{
// compensate distortion iteratively using Newton method
// 去畸变核心代码
for (int j = 0; j < maxCount; j++)
{
double theta2 = theta*theta, theta4 = theta2*theta2, theta6 = theta4*theta2, theta8 = theta6*theta2;
double k0_theta2 = k[0] * theta2, k1_theta4 = k[1] * theta4, k2_theta6 = k[2] * theta6, k3_theta8 = k[3] * theta8;
/* new_theta = theta - theta_fix, theta_fix = f0(theta) / f0'(theta) */
double theta_fix = (theta * (1 + k0_theta2 + k1_theta4 + k2_theta6 + k3_theta8) - theta_d) /
(1 + 3*k0_theta2 + 5*k1_theta4 + 7*k2_theta6 + 9*k3_theta8);
theta = theta - theta_fix;
if (isEps && (fabs(theta_fix) < criteria.epsilon))
{
converged = true;
break;
}
}
scale = std::tan(theta) / theta_d;
}
else
{
converged = true;
}
// theta is monotonously increasing or decreasing depending on the sign of theta
// if theta has flipped, it might converge due to symmetry but on the opposite of the camera center
// so we can check whether theta has changed the sign during the optimization
bool theta_flipped = ((theta_d < 0 && theta > 0) || (theta_d > 0 && theta < 0));
if ((converged || !isEps) && !theta_flipped)
{
Vec2d pu = pw * scale; //undistorted point
// reproject
Vec3d pr = RR * Vec3d(pu[0], pu[1], 1.0); // rotated point optionally multiplied by new camera matrix
Vec2d fi(pr[0]/pr[2], pr[1]/pr[2]); // final
if( sdepth == CV_32F )
dstf[i] = fi;
else
dstd[i] = fi;
}
else
{
// Vec2d fi(std::numeric_limits<double>::quiet_NaN(), std::numeric_limits<double>::quiet_NaN());
Vec2d fi(-1000000.0, -1000000.0);
if( sdepth == CV_32F )
dstf[i] = fi;
else
dstd[i] = fi;
}
}
}
参考资料
Brown-Conrady畸变模型
【1】OpenCV相机模型介绍:https://docs.opencv.org/3.4/d9/d0c/group__calib3d.html
【2】OpenCV去畸变函数:cvUndistortPointsInternal
【3】Conrady A E. Lens-systems, decentered[J]. Monthly Notices of the Royal Astronomical Society, Vol. 79, p. 384-390, 1919, 79: 384-390.
【4】Brown D C. Decentering distortion of lenses, D. Brown Associates[J]. Inc, Eau Gallie, Florida, Tech. Rep, 1966.
【5】Duane C B. Close-range camera calibration[J]. Photogramm. Eng, 1971, 37(8): 855-866.
【6】Weng J, Cohen P, Herniou M. Camera calibration with distortion models and accuracy evaluation[J]. IEEE Transactions on pattern analysis and machine intelligence, 1992, 14(10): 965-980.
Kanala-Brandt畸变模型
【7】OpenCV相机模型介绍:https://docs.opencv.org/3.4/db/d58/group__calib3d__fisheye.html
【8】OpenCV去畸变函数:cv::fisheye::undistortPoints
【9】Kannala J, Brandt S. A generic camera calibration method for fish-eye lenses[C]//Proceedings of the 17th International Conference on Pattern Recognition, 2004. ICPR 2004. IEEE, 2004, 1: 10-13.
【10】Kannala J, Brandt S S. A generic camera model and calibration method for conventional, wide-angle, and fish-eye lenses[J]. IEEE transactions on pattern analysis and machine intelligence, 2006, 28(8): 1335-1340.

















 6048
6048

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









