






 文章详细描述了BEVFusion在单显卡上的环境配置过程,包括Nuscenes数据集的处理、CUDA_VISIBLE_DEVICES的设置以及遇到的RuntimeError问题。作者通过调整PyTorch版本、numpy版本和setuptools版本解决了各种错误,最终成功运行代码。
文章详细描述了BEVFusion在单显卡上的环境配置过程,包括Nuscenes数据集的处理、CUDA_VISIBLE_DEVICES的设置以及遇到的RuntimeError问题。作者通过调整PyTorch版本、numpy版本和setuptools版本解决了各种错误,最终成功运行代码。
BEVFusion环境配置___情不知所起__的博客-CSDN博客
bevfusion单显卡训练/测试_大头蘑菇汤的博客-CSDN博客
参考以上两篇,进行环境搭建
Nuscences数据集,下载和数据处理前的格式不同:
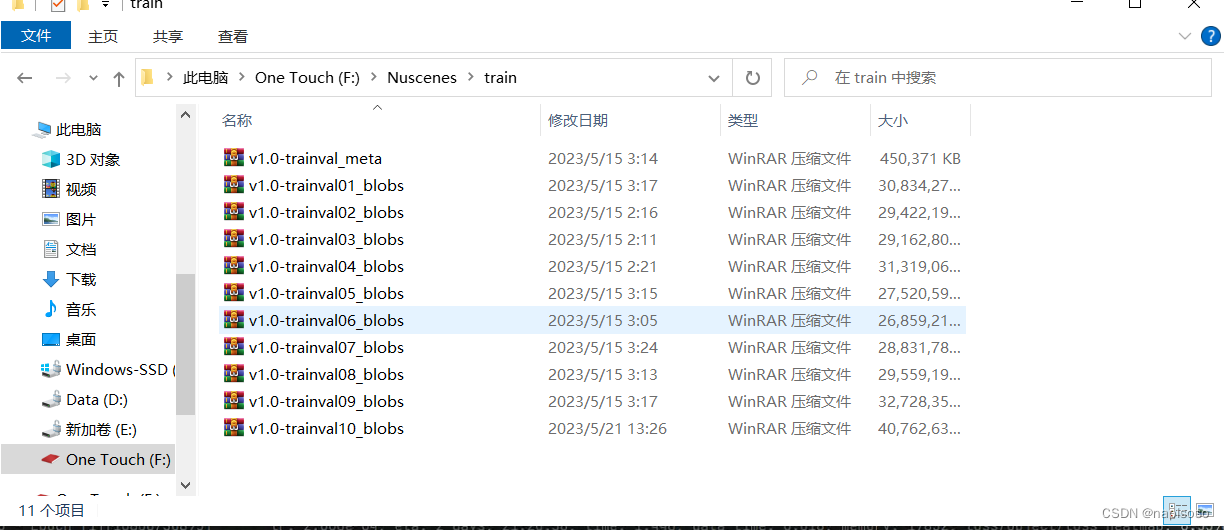
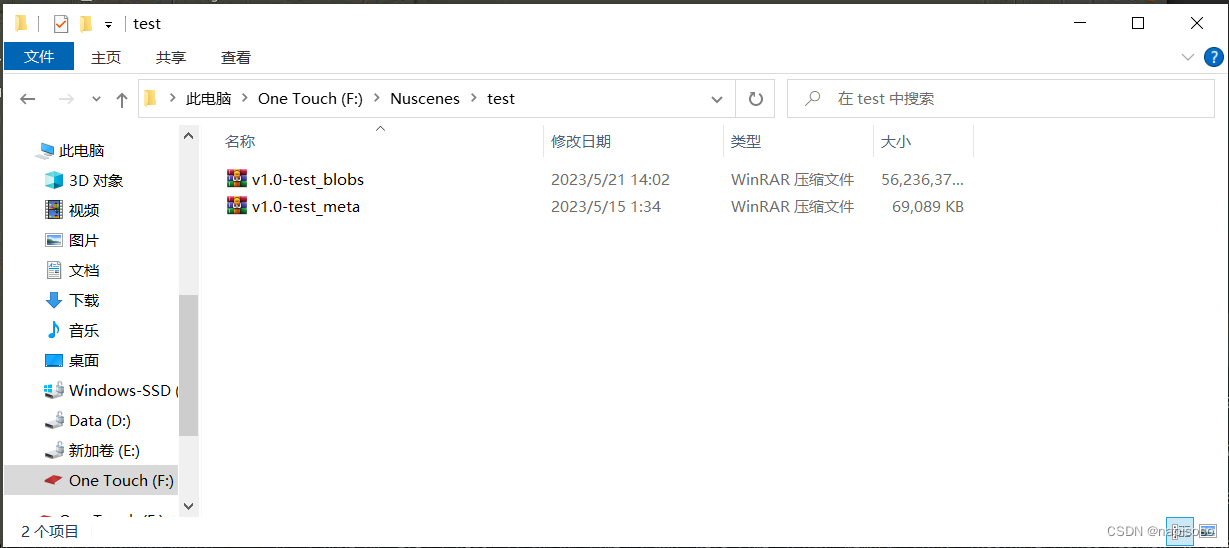
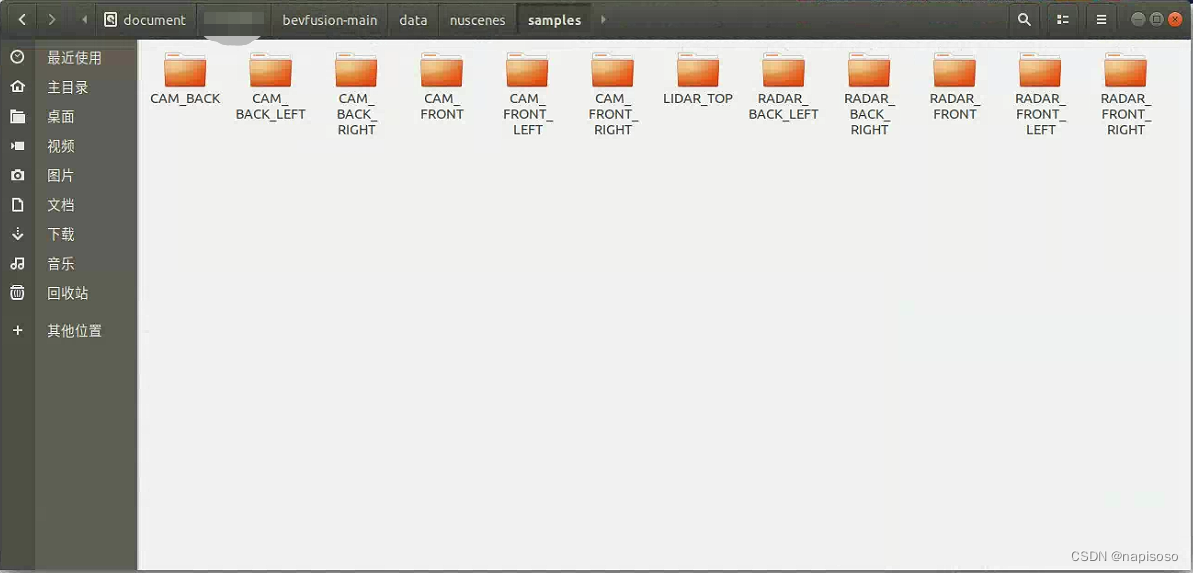
将test和train按照这12个文件夹分,分成下面图所示:其中 maps: basemap,expansion,prediction官网另下:
数据处理之前:
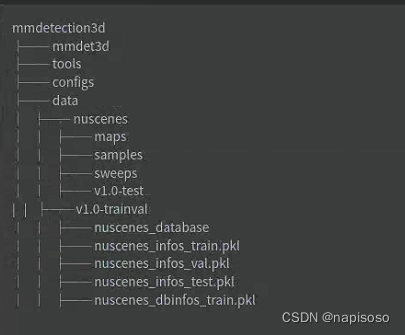
bevfusion
├── assets
├── configs
├── mmdet3d
├── tools
├── data
│ ├── nuscenes
│ │ ├── maps
│ │ │ ├── basemap
│ │ │ ├── expansion
│ │ │ ├── prediction
│ │ ├── samples
│ │ ├── sweeps
│ │ ├── v1.0-test
│ │ ├── v1.0-trainval
数据处理之后:
CUDA_VISIBLE_DEVICES=5 python tools/train_single_gpu.py \
configs/nuscenes/det/transfusion/secfpn/camera+lidar/swint_v0p075/convfuser.yaml \
--model.encoders.camera.backbone.init_cfg.checkpoint pretrained/swint-nuimages-pretrained.pth \
--load_from pretrained/lidar-only-det.pth \
--run-dir output/bev_result/
错误:RuntimeError:No CUDA GPUs are available
单卡训练:我猜测这个指令应该变为:CUDA_VISIBLE_DEVICES=0
【代码工程】BEVFusion(MIT)环境部署_bevfusion代码_Vehicle_jyw的博客-CSDN博客
训练的代码改成下面一行:
torchpack dist-run -np 1 python tools/train.py configs/nuscenes/det/transfusion/secfpn/camera+lidar/swint_v0p075/convfuser.yaml --run-dir bev_result/
就没有报上面的错了
但是之后报了下面的错
出现了一个github提问区上的错误,错误类型很奇怪
RuntimeError: /bevfusion-main/mmdet3d/ops/spconv/include/tensorview/helper_launch.h 17 N > 0 assert faild. CUDA kernel launch blocks must be positive, but got N= 0 #297
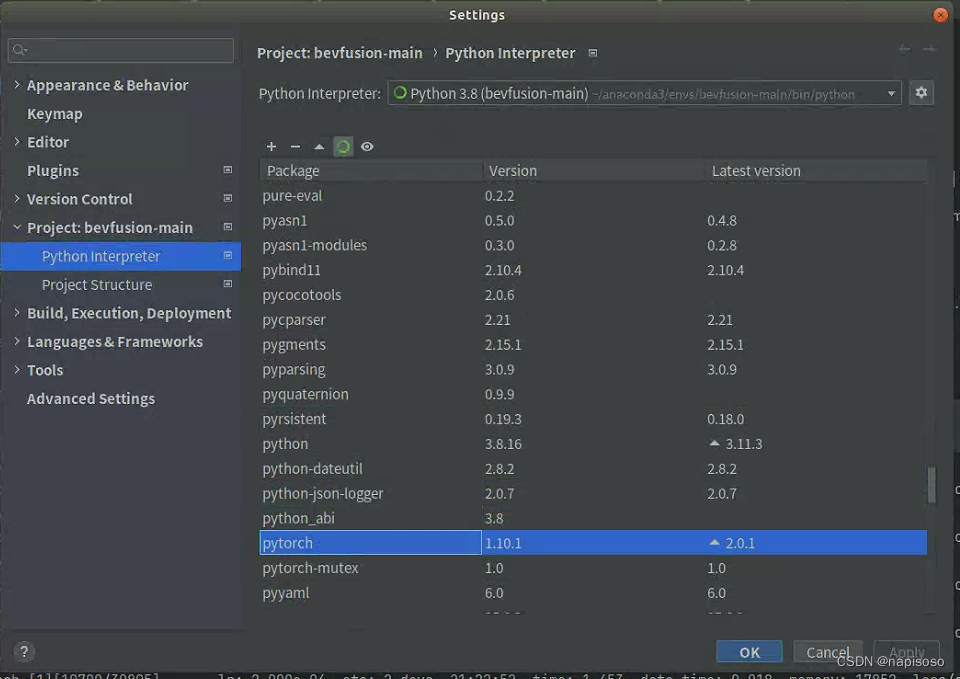
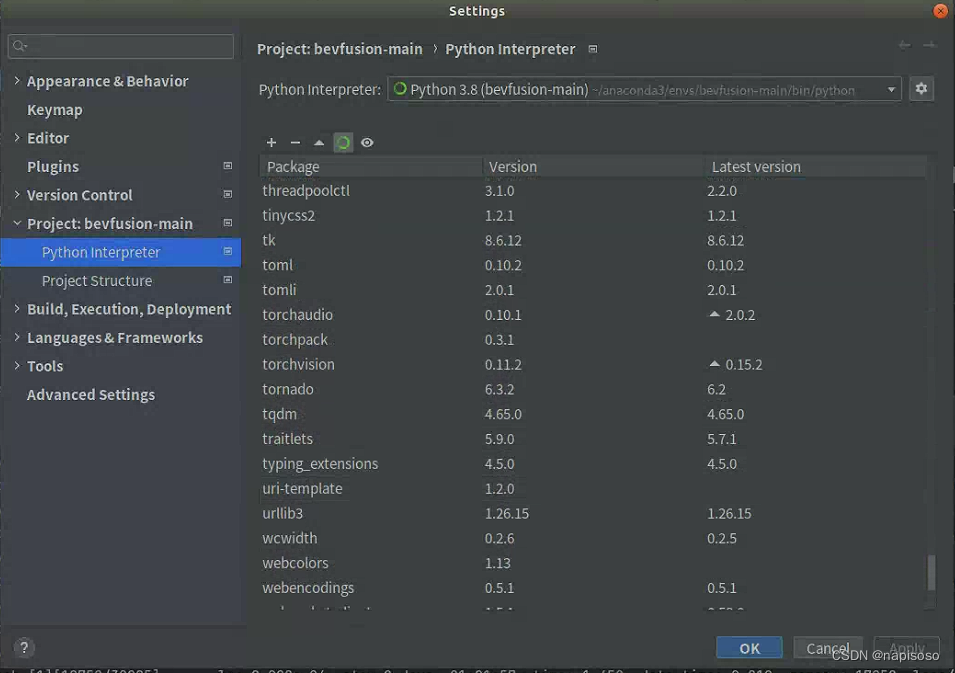
解决方法:pytorch版本降次。原本的配置 cuda11.3 pytorch1.10.1 换成了cuda 11.3 pytorch1.10.0 这个错误就解决了 还是cuda和pytorch版本问题 (可能是操作的问题,最终的配置还是cuda11.3 pytorch1.10.1 没有换成功,但是跑通了,解决的过程是又装了一次pytorch,过程很迷,还没搞清楚)
补充:跑检测没有问题,结果跑分割时又报这个错误,解决方法:重新下了一次pytorch, 这回版本变成功了pytorch=1.10.0 然后就是numpy降级 之后就成功了

错误:AttributeError: module ‘numpy‘ has no attribute ‘long‘
numpy版本降级
AttributeError: module ‘numpy‘ has no attribute ‘long‘_最 上 川的博客-CSDN博客
运行python代码时遇到module ‘numpy‘ has no attribute ‘float‘解决方法_wongHome的博客-CSDN博客
错误:ModuleNotFoundError: No module named 'pkg_resources'
解决python运行出现ModuleNotFoundError: No module named ‘pkg_resources‘_weixin_44001746的博客-CSDN博客
错误:AttributeError: module 'distutils' has no attribute 'version' 这个错误出现最多次
AttributeError:module ‘distutils’ has no attribute ‘version错误解决方法_ASS-ASH的博客-CSDN博客
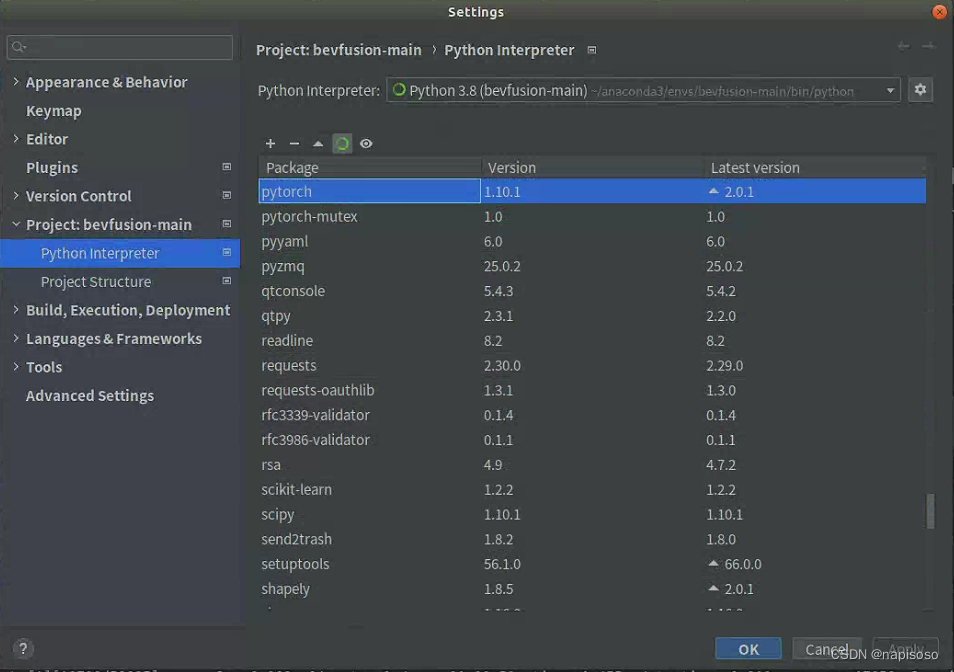
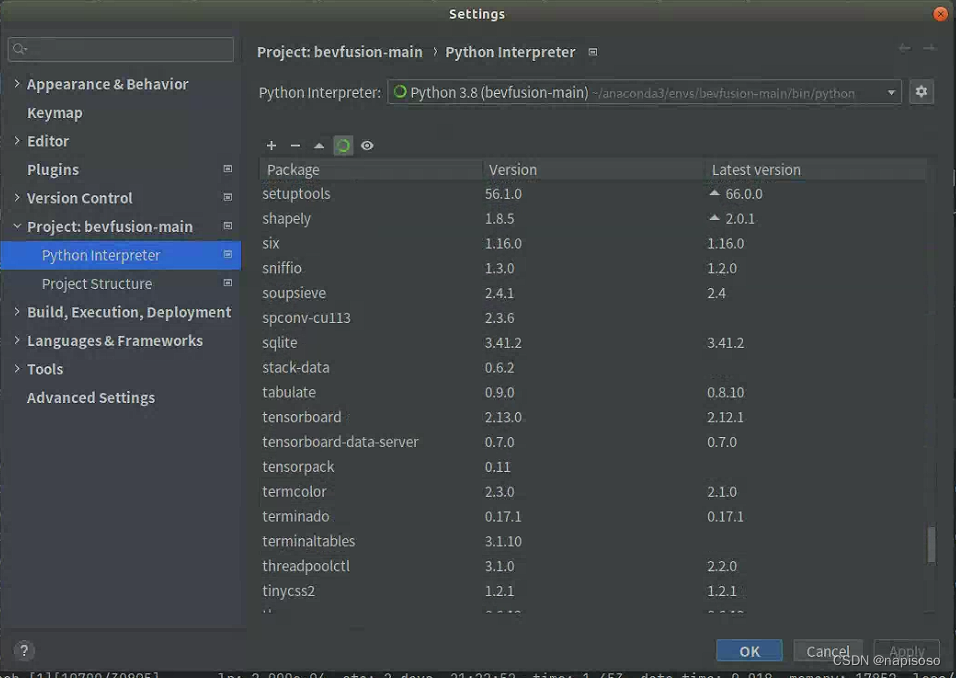
以上这两个错误都源于:setuptools版本太高 最终版本定位56.10
最终的配置



















 2022
2022

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









