







目前关于自动驾驶数据集你想知道的,应该都在这里了,这是「整数智能」自动驾驶数据集八大系列分享之系列三:
「本期划重点」
-
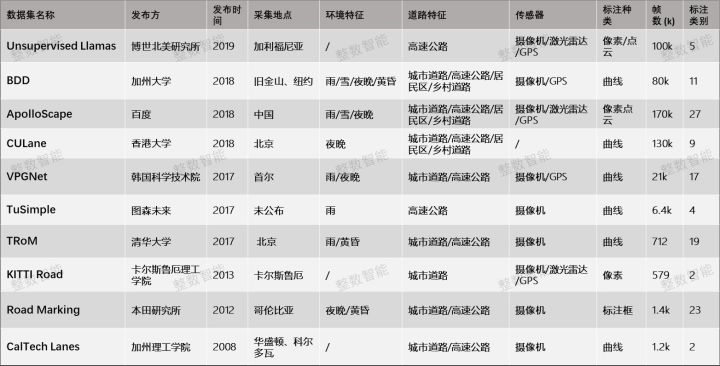
Road Marking数据集是专门为为评估道路标线检测和识别的性能而设计的数据集,几乎包含了美国道路上所有常见的标记
-
Unsupervised Llamas数据集是是最大的高质量车道标记数据集之一
-
由卡尔斯鲁厄理工学院发布的KITTI Road数据集是目前自动驾驶领域最重要的测试集之一,KITTI主要针对自动驾驶领域的图像处理技术,主要应用在自动驾驶感知和预测方面,其中也涉及定位和SLAM技术
「八大系列概览」
自动驾驶数据集分享是整数智能推出的一个全新分享系列,在这个系列中,我们将介绍目前为止各大科研机构和企业推出的所有公开自动驾驶数据集。数据集主要分为八个系列:
-
系列一:目标检测数据集
-
系列二:语义分割数据集
-
系列三:车道线检测数据集
-
系列四:光流数据集
-
系列五:Stereo Dataset
-
系列六:定位与地图数据集
-
系列七:驾驶行为数据集
-
系列八:仿真数据集
01「 Unsupervised Llamas 」
-
发布方:BoschN.A.Research
-
下载地址: https://unsupervised-llamas.com/llamas/
-
论文地址: https://openaccess.thecvf.com/content_ICCVW_2019/papers/CVRSUAD/Behrendt_Unsupervised_Labeled_Lane_Markers_Using_Maps_ICCVW_2019_paper.pdf
-
发布时间:2019年
-
简介:该数据集是最大的高质量车道标记数据集之一,通过该数据集,发布方提供了一个基准和基线
-
特征
-
包括100,042张有标签的车道标记图像,来自约350公里的驾驶记录
-
生成标记图像的管道利用自动创建的地图将标记投射到相机图像中,并依靠优化程序来提高标签的准确性
-
包含像素级的虚线标注,每个标记的二维和三维端点以及连接标记的车道关联
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章















 1890
1890











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









