







ROS学习笔记七:使用rqt_console和roslaunch
本节主要介绍在调试时使用的rqt_console和rqt_logger_level,以及一次性打开多个节点的工具roslaunch。
使用rqt_console和rqt_logger_level
- rqt_console:主要显示节点的输出信息。
- rqt_logger_level:用于设置输出信息的重要性等级。
还是利用turtlesim例程,看一下其不同等级的输出。在打开turtlesim之前,首先要运行roscore,然后在两个不同的终端中输入以下命令:
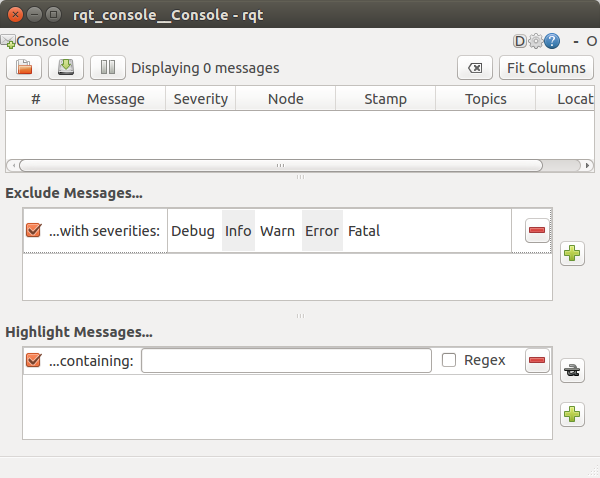
rosrun rqt_console rqt_consolerosrun rqt_logger_level rqt_logger_level可以看到如下弹出的窗口

然后在一个新的终端中输入以下命令打开turtlesim
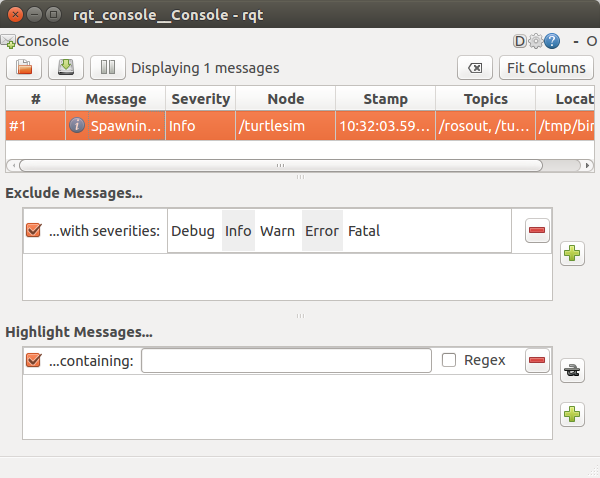
rosrun turtlesim turtlesim_node然后发现rqt_console窗口中就有了一个生成的信息
现在可以更改rqt_logger_level中的信息等级,更改为warn,则只会显示warn、error和fatal类的信息。通过rostopic pub命令向小海龟发送命令让其撞墙,产生警告信息:
rostopic pub /turtle1/cmd_vel geometry_msgs/Twist -r 1 -- '[2.0,0.0,0.0]' '[0.0,0.0,0.0]'然后在rqt_console窗口中就会显示撞墙的警告信息:

roslaunch
roslaunch一次性打开在一个launch文件中定义的所有节点。
roslaunch基本语法
roslaunch [package] [launch.file] [args]
roslaunch < 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 393
393











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









