






关注公众号,发现CV技术之美
本篇分享论文A Survey on Vision-Based Anti Unmanned Aerial Vehicles Methods,基于视觉的反无人机综述。
论文地址:https://www.mdpi.com/2504-446X/8/9/518
摘要
近年来,由于无人机滥用带来很多问题,许多反无人机方法被引入来解决这些问题。这些方法主要依赖于物理层面,如雷达检测、射频分析和声学检测。
传统的雷达系统在检测小型无人机方面表现出了一定的效果,特别是在反射和干扰众多的复杂地形和城市环境中。射频和声学检测系统通常是低成本且易于部署的,但它们非常容易受到城市环境中电磁和噪声干扰的影响。这些方法没有考虑到视觉方面的信息。
事实上,视觉信息具有独特的优势,因为它允许通过捕获和分析无人机的视觉特征来进行更直观、更精确的识别和跟踪。然而,视觉信息的处理具有一些挑战:
无人机目标经常经历剧烈尺度变化,飞行过程中频繁消失,跟踪性能受到相机运动的严重影响;
在红外场景中,无人机目标尺度小,分辨率低,外观信息不足,容易被背景信息掩盖;
无人机在复杂场景下的飞行会导致目标遮挡和不稳定的飞行路径。
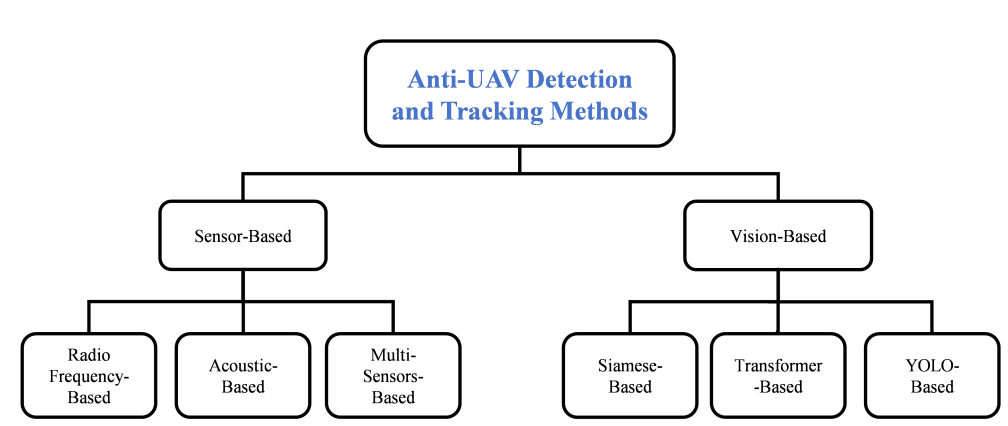
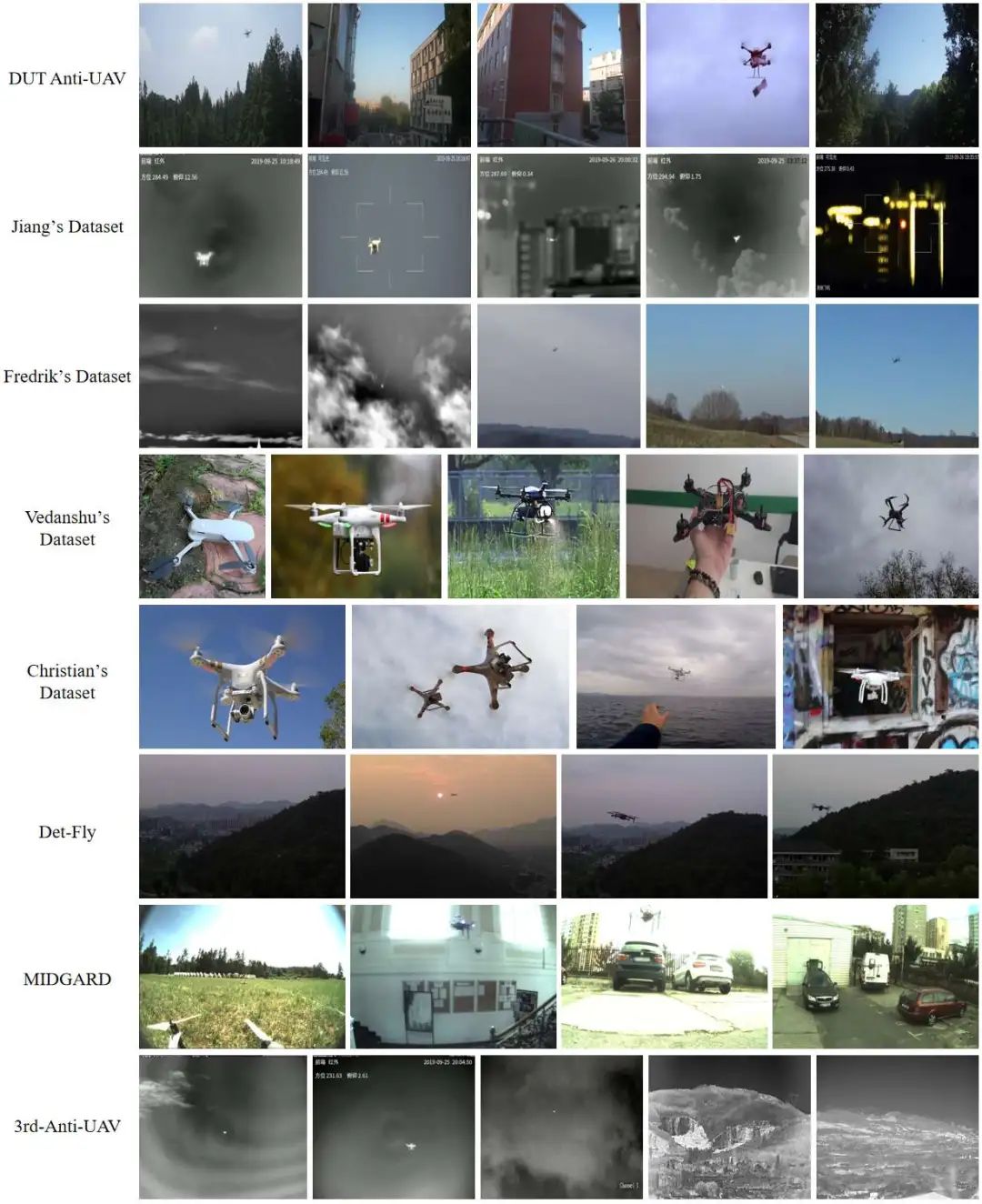
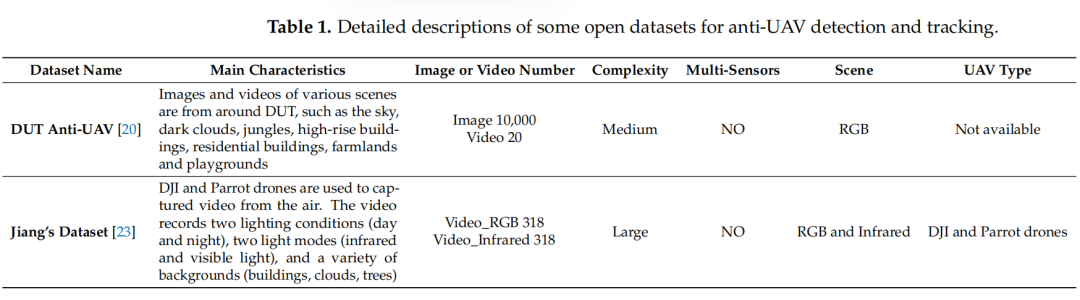
本文概述了近年来基于视觉的反无人机检测方法。根据使用的主干类型和应用场景,我们将相关方法分类为基于传感器的方法和基于视觉的方法。我们搜集并总结了9个公开的反无人机数据集,涵盖了RGB图像、红外图像和声学数据。
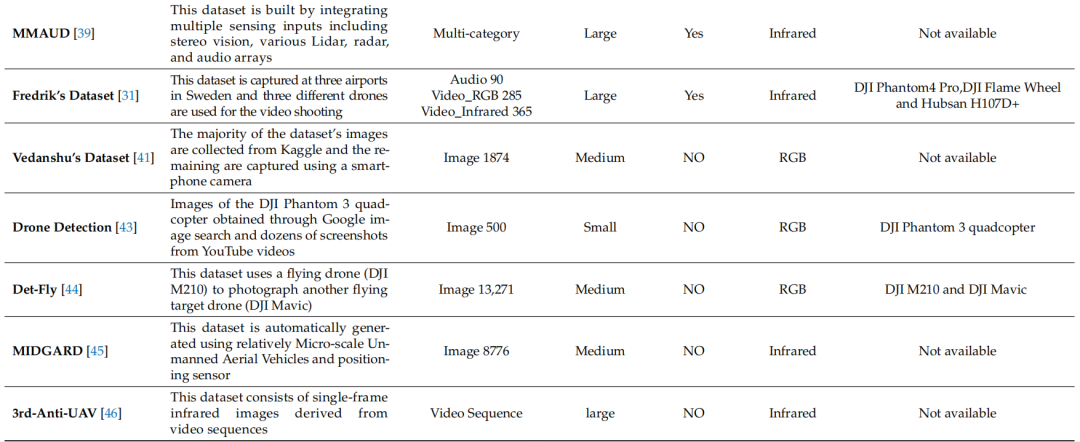
本文还提供了数据集有效原始链接,以便读者可以快速访问它们。我们对反无人机数据集和方法的局限性进行了详细的讨论,同时,为未来的研究提出了几个潜在的方向。
概要
我们主要在Google Scholar, IEEE Xplore, Web of Science以及一些学术网站上搜集反无人机方法的文献,主要搜集近5年的文献,这可以代表最新的研究进展。
搜索关键词为"Anti-UAV", "UAV Detection", "UAV Tracking", "Deep learning for anti drone detection"。
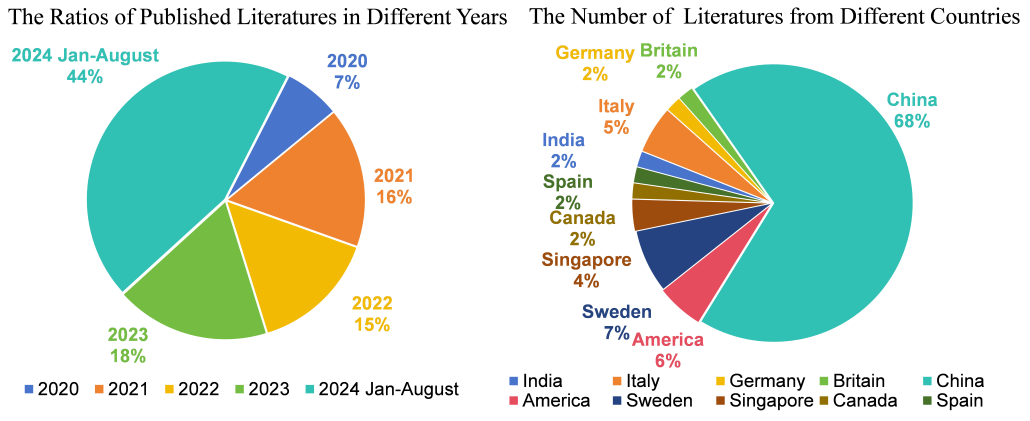
文献主要包括期刊论文、会议论文、预印本及各种竞赛资料。本文将它们按国家和出版时间进行分类。如下图所示,图中总结了全球不同国家或地区的论文数量,并给出了发表日期的分布情况。
左图所示文献的数量保持增长的趋势,意味着该领域受到越来越多的关注;右图反映了中国发表的文献最多,占68%。这可能得益于中国在无人机领域技术研发的持续投入。
我们对收集到的近5年的文献进行综合分析,将反无人机方法分为两类:基于传感器的方法和基于视觉的方法。
数据集
数据集名称和链接如下所示:
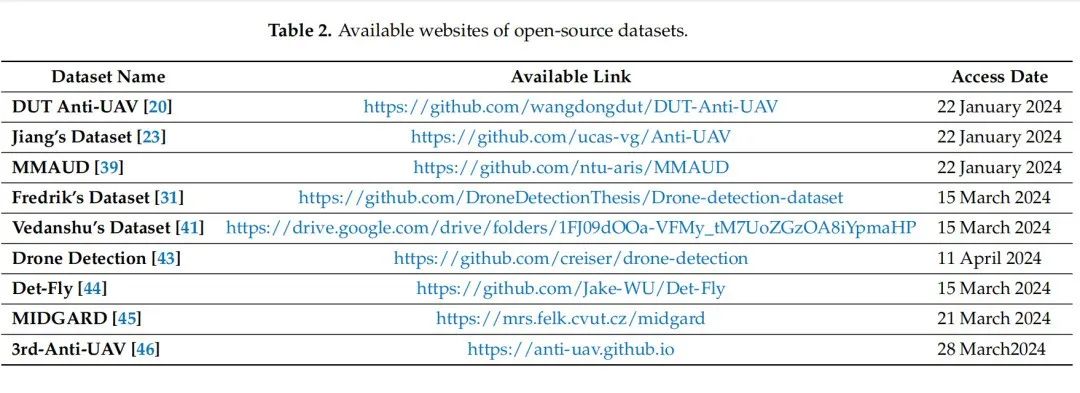
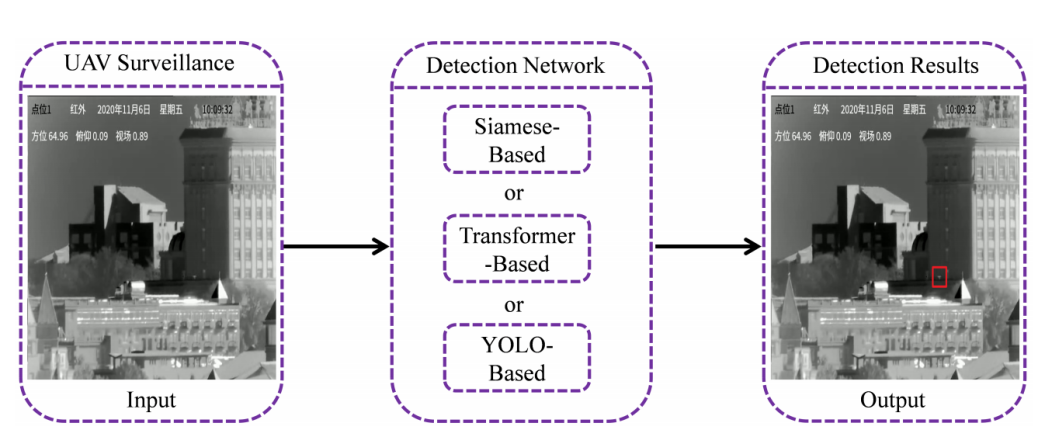
部分有代表性的方法示意图
基于传感器的方法示意图
基于视觉的方法示意图
讨论
当前数据集的一些限制
缺乏多目标数据集
分辨率和质量较低
场景缺乏多样性
无人机类型单一
当前算法的一些限制
缺乏统一的评估规则
模型大小的不确定性
难以实现性能与精度之间的权衡
泛化能力不足
无人机群的探测和跟踪仍然不发达
未来可能的研究方向分析
图像超分辨率重建
自主学习能力
多模态感知技术的整合
对抗多智能体协同作战
抗干扰能力
✎作者:
➤王兵书 西北工业大学软件学院
➤李强 西北工业大学软件学院
➤毛千辰 西北工业大学软件学院
➤王金宝 深圳大学大数据系统计算技术国家工程实验室
➤陈俊龙 华南理工大学计算机科学与工程学院
➤上官爱红 中国科学院西安光学精密机械研究所
➤张昊苏 中国科学院西安光学精密机械研究所
获取该综述原文,可在【我爱计算机视觉】公众号后台回复关键词“Anti-UAV”。
最新 AI 进展报道
请联系:amos@52cv.net

END
欢迎加入「航空影像」交流群👇备注:UAV


















 2929
2929

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









