






在很多slam代码中有看见用旋转矩阵(方向余弦矩阵)的第三列的列向量和目标物体的法向量,来判断是否是正面对着目标物体。
很久之前稍微推导了一下,最近刚好看见草稿 又简单证明了一下为什么可以用旋转矩阵(方向余弦矩阵)的第三列的列向量代表载体运动的方向向量,即右手坐标系X轴指向前方的单位向量
根据欧拉角转旋转矩阵有:
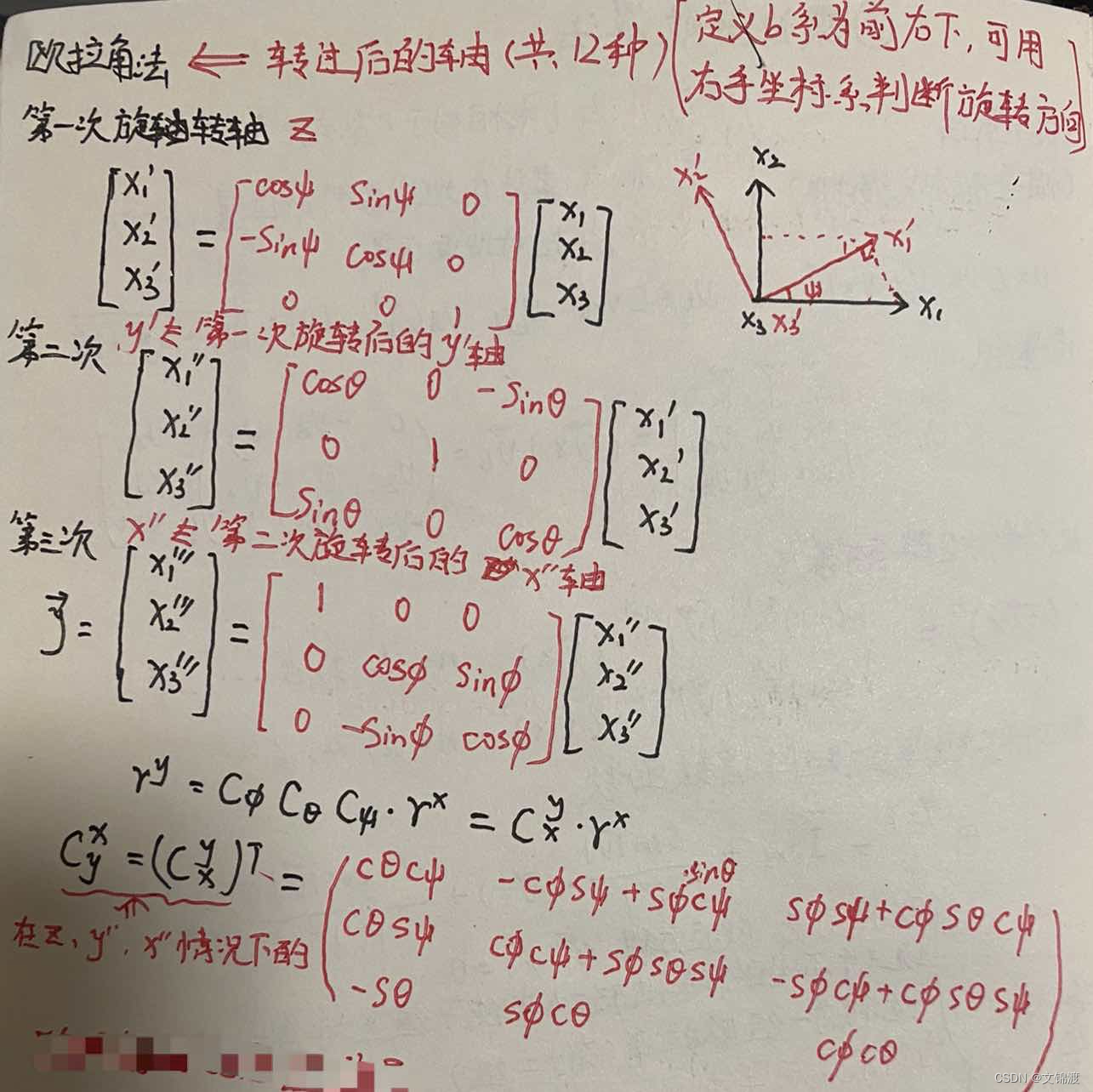
此时,代表X轴单位向量的为旋转矩阵(方向余弦矩阵)的第一列的列向量

从物理角度,载体坐标系前向(X轴朝向)与绕X轴自身的旋转的roll角无关,与yaw和pitch相关;从数学角度,该向量为单位向量(平方和为1)。
TMD 写到后面突然发现 直接取单位向量a=[1,0,0]T,取x=R*a即可得到X轴的方向向量。。。傻里吧唧的写了这么多。。。
唯一要注意的一点时,在本文证明中是用的欧拉角绕ZYX的旋转轴得到旋转矩阵,所以对应的X轴的方向向量是第一列,而在开篇中提到的第三列则应该是绕XYZ得到旋转矩阵
ps.绕轴得到旋转矩阵的差异参考matlab和Eigen库中的一些旋转矩阵(方向余弦矩阵)、四元数和欧拉角之间的转换和绘图的注意事项_文锦渡的博客-CSDN博客_方向余弦矩阵和旋转矩阵
参考:
















 1770
1770











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











