







原文链接:https://blog.csdn.net/shenxiaolu1984/article/details/50639298
原文链接:https://blog.csdn.net/lql0716/article/details/72597719
三维空间刚体旋转有两种方式:
- (1) 任何一个旋转可以表示为依次绕着三个旋转轴旋三个角度的组合。这三个角度称为欧拉角。
- (2) 三维空间的任意旋转,都可以用绕三维空间的某个轴旋转过某个角度来表示。
绕坐标轴的多次旋转可以等效为绕某一轴旋转一定角度,我感觉这就是四元数最直观的几何意义了。不管是RPY还是欧拉角,都可以利用四元数来代替表达。可以参考下面这篇博文:
https://www.cnblogs.com/21207-iHome/p/6894128.html
1.欧拉角的物理意义:
任何一个旋转可以表示为依次绕着三个旋转轴旋三个角度的组合。这三个角度称为欧拉角。
三个轴可以指固定的世界坐标系轴,也可以指被旋转的物体坐标系的轴。三个旋转轴次序不同,会导致结果不同。
本文中提到的欧拉角指:绕着世界坐标系的x,y,z轴,依次旋转的结果。其取值范围如下:

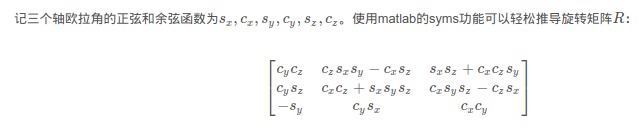
欧拉角→旋转矩阵
单独绕一个轴旋转θ角度的旋转矩阵为:

如果依次绕x轴、y轴、z轴旋转,该变换的旋转矩阵为:

2.四元数的物理意义:
旋转向量
三维空间的任意旋转,都可以用绕三维空间的某个轴旋转过某个角度来表示,即所谓的Axis-Angle(轴角)表示方法。轴角,就是绕一个轴旋转某个角度,来表示一个旋转。
这种表示方法里,Axis(轴)可用一个三维向量(x,y,z)来表示,θ可以用一个角度值来表示。
直观来讲,一个四维向量(θ,x,y,z)就可以表示出三维空间任意的旋转。注意,这里的三维向量(x,y,z)只是用来表示axis(轴)的方向朝向,因此更紧凑的表示方式是用一个单位向量来表示方向axis(轴),而用该三维向量的长度来表示角度值θ。
这样以来,可以用一个三维向量(θ∗x,θ∗y,θ∗z)就可以表示出三维空间任意的旋转,前提是其中(x,y,z)是单位向量,即
x
2
+
y
2
+
z
2
=
1
\color{red}x^2 + y^2 + z^2 = 1
x2+y2+z2=1。这就是旋转向量(Rotation Vector)的表示方式,OpenCV里大量使用的就是这种表示方法来表示旋转(见OpenCV相机标定部分的rvec)。
四元数
前面的旋转向量中的单位向量(x,y,z)旋转θ角度后的四元数:

对于三维坐标的旋转,可以通过四元数乘法直接操作,与旋转矩阵操作可以等价,但是表示方式更加紧凑,计算量也可以小一些。
需要注意,单位向量(x,y,z)指的是这个向量长度为1,即
x
2
+
y
2
+
z
2
=
1
\color{red}x^2 + y^2 + z^2 = 1
x2+y2+z2=1,这个向量是表示的这个轴的位置,表述某个向量时,一般会把这个向量用单位向量表示,下面的(w1,w2,w3)就是单位向量(x,y,z),写法不一致而已。
四元数的模是四元数到原点的距离。如果某个四元数(q0, q1, q2, q3)的模长为1,即满足
q
0
2
+
q
1
2
+
q
2
2
+
q
3
2
=
1
\sqrt {q_0^2 + q_1^2 + q_2^2 + q_3^2}=1
q02+q12+q22+q32=1。但并不是说所有四元数的模都为1。只有表示旋转的四元数的模才为1,所以上面旋转向量的模才为1。不要混淆了。
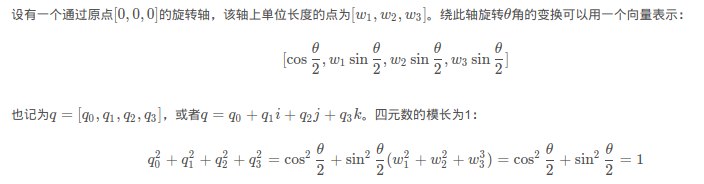
注意,上面的w1,w2,w3不是i,j,k, 不要搞混了。[w1,w2,w3]是通过原点的某个轴上的单位长度(长度为1)的点,即
w
1
2
+
w
2
2
+
w
3
2
=
1
w_1^2+ w_2^2 + w_3^2 =1
w12+w22+w32=1。
[w1,w2,w3]是个三维坐标点,设为点P,则OP就是这个旋转轴,w1,w2,w3分别为距离坐标系原点O的三个方向的距离。
欧拉角的缺点:
- 1、 欧拉角的表示方式不唯一。给定某个起始朝向和目标朝向,即使给定yaw、pitch、roll的顺序,也可以通过不同的
yaw/pitch/roll的角度组合来表示所需的旋转。这其实主要是由于万向锁(Gimbal Lock)引起的; - 2、欧拉角的插值比较难;
- 3、计算旋转变换时,一般需要转换成旋转矩阵,这时候需要计算很多sin, cos,计算量较大;
对于三维坐标的旋转,可以通过四元数乘法直接操作,与旋转矩阵操作可以等价,但是表示方式更加紧凑,计算量也可以小一些。
万向锁
请参考原文:https://zhuanlan.zhihu.com/p/74040465
为了更好的理解这个现象,我们再用自己的手机做一个试验:
- 把手机屏幕朝上,手机的长边为X轴,短边为Y轴,Z轴垂直屏幕向下。
- 你先绕
Z轴旋转一下手机,假设旋转30度; - 然后再把手机绕
Y轴旋转90度,也就是把手机短边接触桌面,长边竖立起来; - 这时候你再绕手机的长边(
X轴)旋转,你会发现手机的短边一直定在桌面上不可能脱离桌面,这就是万向锁现象。
下面这个说法,是从方向自由度来说明的:
需要注意的是XYZ轴的定义动态跟从手机的方向,例如Z轴永远是手机屏幕所示方向。
按Z->Y->X的顺序来旋转手机,不过规定Y旋转的角度为90°。
这样做的时候你会发现无论你怎样选择Z和X的旋转角度,手机的短边都无法离开桌面。这意味着什么呢?这意味着虽然你看似有X、Z旋转的2向自由度,但是当Y被定为90的时候,这个系统实际上只有一向自由度,因为任何两向自由度的旋转一定可以使任一直线离开任一平面,而我们绕Z轴和x轴随便转却并不能将手机的短边移开桌面。
下面这个说法,是从绕X、Z轴分别旋转不同角度却能达到同样效果来说明:
首先旋转顺序就是Z-Y-X,绕完Y轴旋转后,只能绕X轴旋转了,不能再绕Z轴旋转了;
举例:
- 转法1:你先绕Z正方向旋转30°,再绕Y正方向旋转90°,最后绕X轴旋转30°,见下图左;
- 转法2:你先绕Z正方向旋转20°,再绕Y正方向旋转90°,最后绕X轴旋转40°,见下图右;
实线是最开始没旋转的,虚线矩形是绕Z轴旋转后的,绕y轴旋转后的由于是竖直方向的,所以没画出来,箭头指向的那个虚线是绕X轴旋转的角度。下面两幅图最终都达到了同样的效果,角度都为60°。

你会发现两种转法的结果是一样的,所以说先绕Z旋转的度数和最后绕X的旋转度数,没啥区别了。最终的结果就是,你绕X轴旋转的角度,也可以通过旋转Z轴来达到同样;或者,你绕Z轴旋转的角度,也可以通过旋转X轴来达到同样效果。
数学解释:
一般情况下都是绕X轴旋转的是pitch俯仰角,绕Y轴旋转的是yaw偏航角,绕Z轴旋转的是roll翻滚角。
最后,再让我们用数据公式来解释一下万向锁现象产生的原因,我们来回顾一下旋转矩阵:
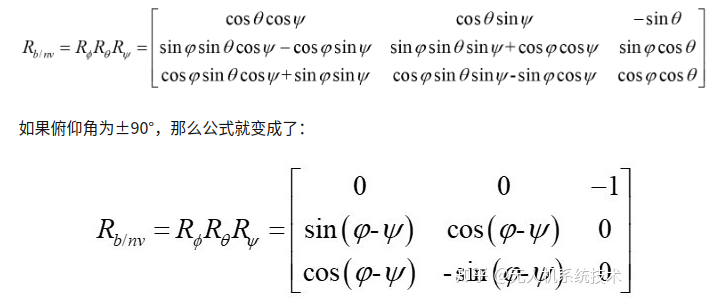
这说明你改变φ和ψ的值都是一个效果,而矩阵的第一行和最后一列始终是保持不变,这说明无论你怎么改变φ和ψ,你的旋转轴一直是Z轴不变,要想改变φ和ψ有不同的效果,你只能是去改变θ的值,以上就是用数学方法来解释为什么俯仰角在±90°时欧拉角出现万向锁的过程。















 9535
9535











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









