






vins fusion 学习(更新中)
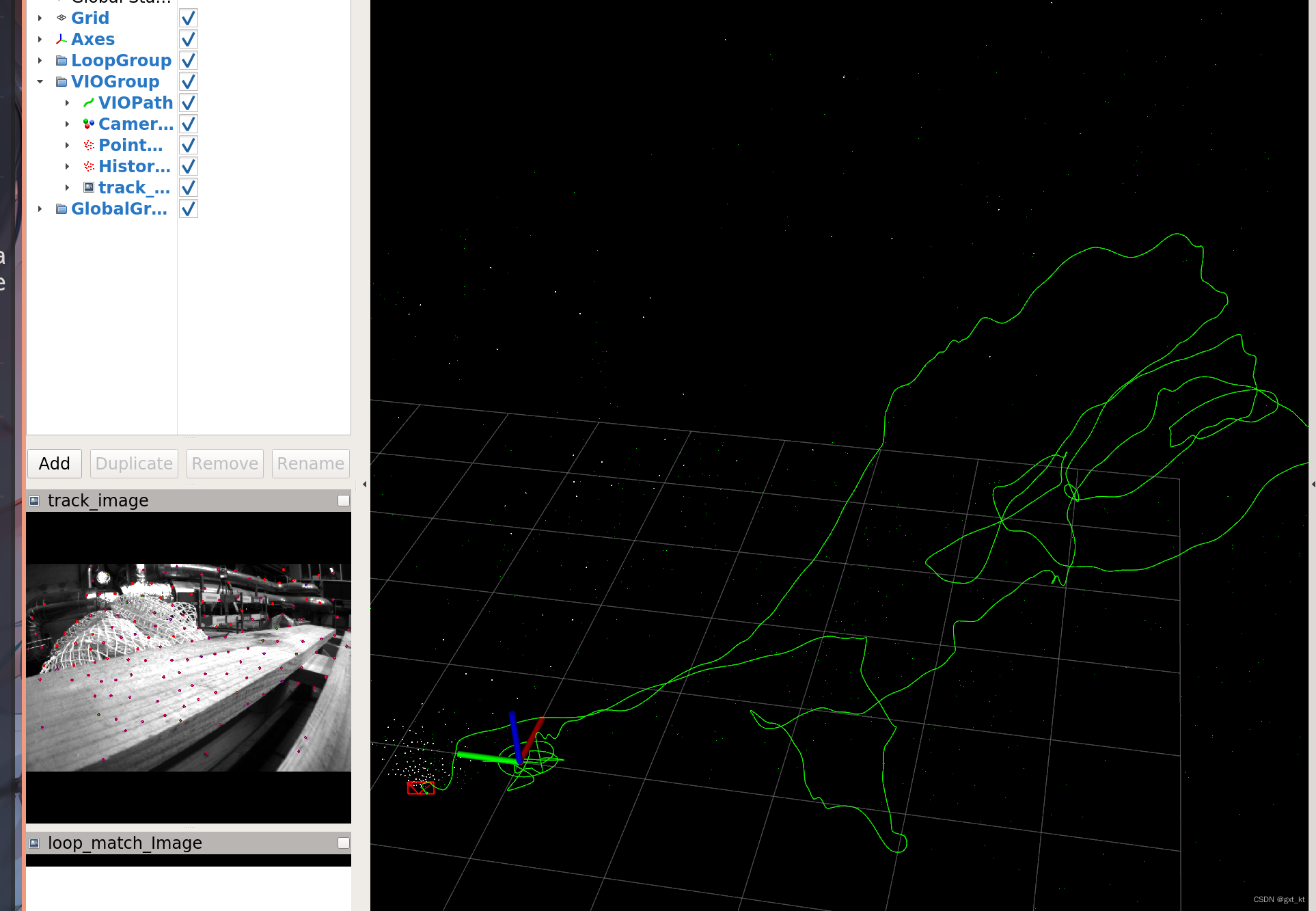
RVIZ图像:
绿色的是里程计路径
图像中红色的是特征点
红色框是相机
白色的小点是图像中的特征点对应到空间中的特征点
使用rosrun rqt_graph rqt_graph得到节点订阅图
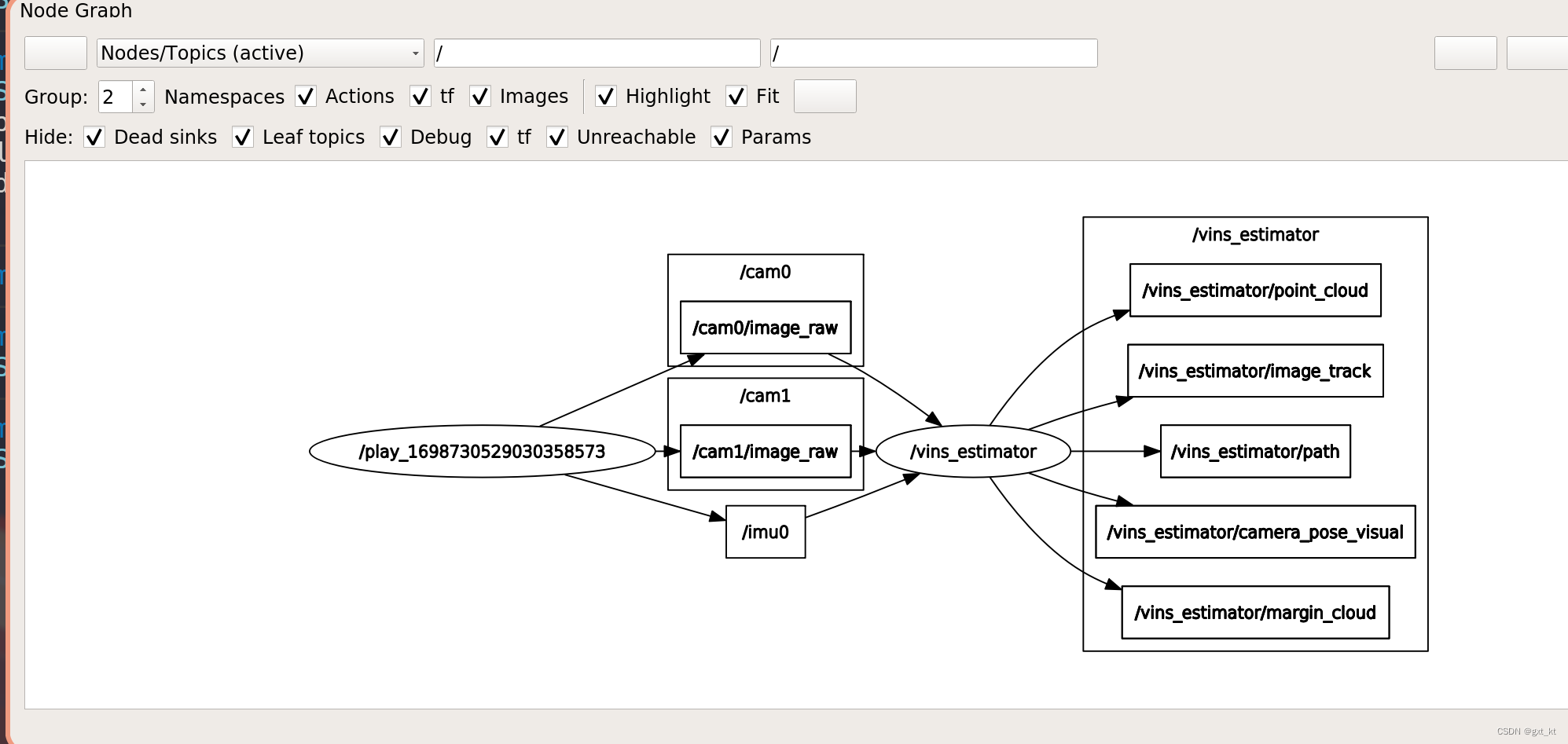
可以看到rosbag发布了以下数据
- imu:imu0
- 双目图像:cam0(虽然我们暂时跑的是一个单目+imu的工程yaml配置,也就是第二个图像cam1没有用上)
按照流程来说
首先对拿到的图像做trackImage函数,这个函数有默认参数,适应于单目或者双目
/**
- 跟踪一帧图像,提取当前帧特征点
- 1、用前一帧运动估计特征点在当前帧中的位置
- 2、LK光流跟踪前一帧的特征点,正反向,删除跟丢的点;如果是双目,进行左右匹配,只删右目跟丢的特征点
- 3、对于前后帧用LK光流跟踪到的匹配特征点,计算基础矩阵,用极线约束进一步剔除outlier点(代码注释掉了)
- 4、如果特征点不够,剩余的用角点来凑;更新特征点跟踪次数
- 5、计算特征点归一化相机平面坐标,并计算相对与前一帧移动速度
- 6、保存当前帧特征点数据(归一化相机平面坐标,像素坐标,归一化相机平面移动速度)
- 7、展示,左图特征点用颜色区分跟踪次数(红色少,蓝色多),画个箭头指向前一帧特征点位置,如果是双目,右图画个绿色点
*/
map<int, vector<pair<int, Eigen::Matrix<double, 7, 1>>>> FeatureTracker::trackImage(double _cur_time, const cv::Mat &_img, const cv::Mat &_img1)
调用的语句是featureFrame = featureTracker.trackImage(t, _img);
然后会把featureFramepush到对应的featureBuf里
其中对于拿到的map<int, vector<pair<int, Eigen::Matrix<double, 7, 1>>>>的值的意义是
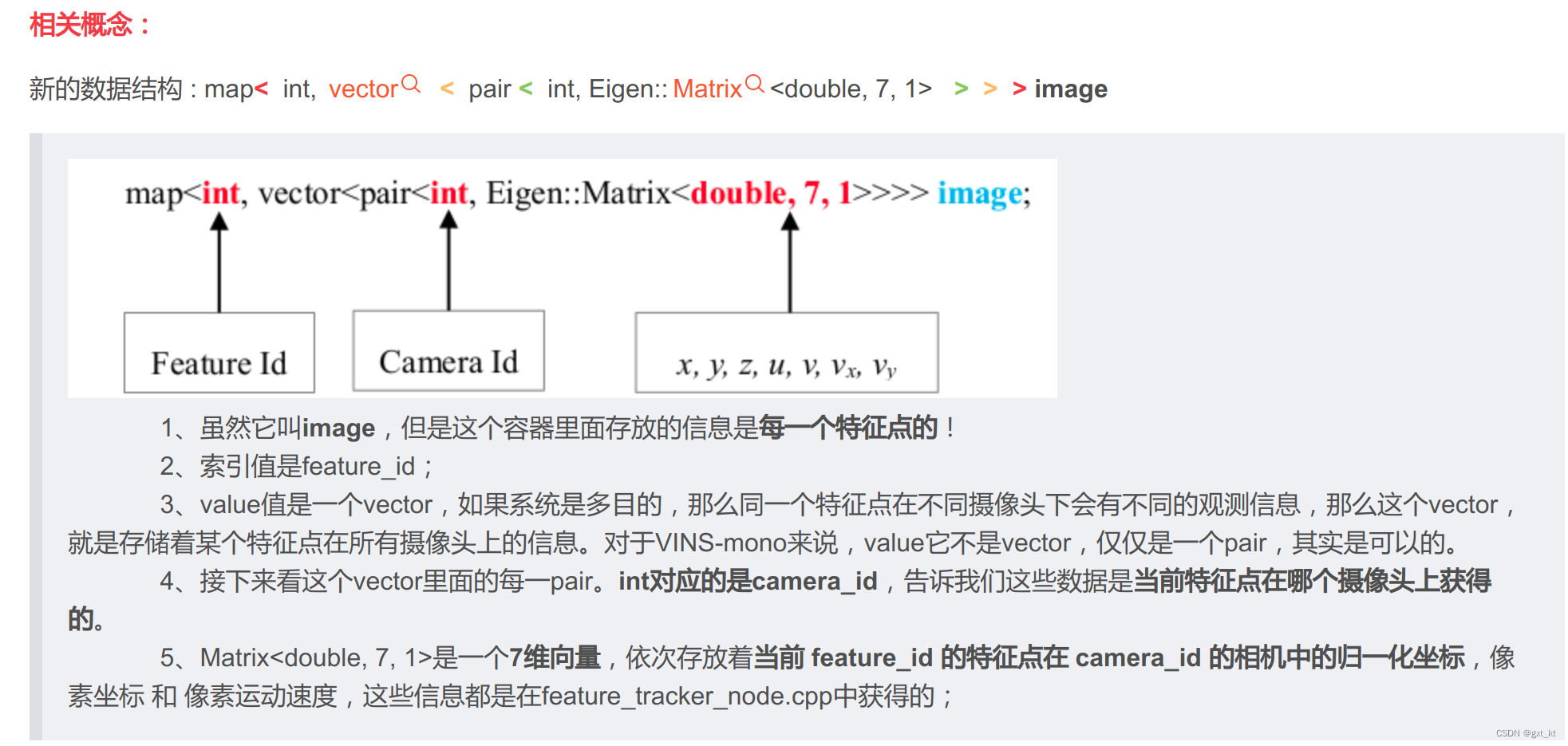
ref: https://blog.csdn.net/hltt3838/article/details/109392565
后面就是processMeasurements函数进行处理
注意processMeasurements可以选择成多线程处理,如果不选择,就是直接跟在上面的函数后进行处理
首先相机20hz,imu200hz,那么一帧相机对应10帧imu,就先根据上一帧相机时间和当前帧相机时间取出这一段时间内的imu数据(理论上是10帧,但也可能因为错位或者处理不及时是别的,很正常)
然后把上面的数据使用for循环给到processIMU函数进行预积分处理
在processIMU这个函数里,会通过预积分给到 Matrix3d的旋转Rs[10],Vector3d的位置Ps[10],Vector3d的速度Vs[10]
然后就是最关键的processImage函数
void Estimator::processImage(const map<int, vector<pair<int, Eigen::Matrix<double, 7, 1>>>> &image, const double header)
这个函数的第一个输入参数其实就是之前的featureFrame,第二个是对应的时间戳
首先由addFeatureCheckParallax函数根据和上一帧特征点的关系(多种情况,暂且不做复杂讨论)确定当前帧是否是关键帧
然后把对应标志位marginalization_flag设置为MARGIN_OLD或者MARGIN_SECOND_NEW
- 如果是关键帧,就是设置为
MARGIN_OLD,然后移除掉滑动窗口的最早的一帧 - 如果不是,就移除掉滑动窗口最近的一帧(把当前帧当成最近的一帧)
三角化函数FeatureManager::triangulate
首先遍历所有特征点
然后会看当前特征点的深度是否大于0,因为默认深度是-1,如果大于0就说明这个特征点三角化过了
如果当前是双目,并且这个特征点同时在两个双目被观测到了(is_stereo==true)
就会走 if(STEREO && it_per_id.feature_per_frame[0].is_stereo)
一些变量的意思:
Ps[imu_i]: imu_i时刻的imu位姿,即imu与世界坐标系间的位移
Rs[imu_i]: imu_i时刻的imu旋转矩阵,即imu坐标系相对世界坐标系的旋转
tic[0]: 左目相机相对imu的位移变换
ric[0]: 左目相机相对imu的旋转变换
经过一通操作,求出左目相机的Tcw和右目的Tcw
然后取出这个特征点分别在左右目上的特征点的归一化坐标
根据上面四个内容,调用triangulatePoint使用SVD计算三角化点
计算出的point3d是世界坐标系下的点也就是twp
然后利用point3d计算出tcp,然后第三个变量就是相机坐标系下的深度z
三角化的目的就是计算出特征点的深度,不论是单目还是双目
计算出来后更改变量it_per_id.estimated_depth注意这里仍然是计算出来的深度,不是逆深度
ceres优化部分:关于重投影的残差添加
针对不同种类的情况进行分类:
首先如果STEREO && it_per_frame.is_stereo,也就是双目并且当前特征点在双目上都有
然后会根据当前帧是不是特征点的首帧
class ProjectionOneFrameTwoCamFactor : public ceres::SizedCostFunction<2, 7, 7, 1, 1>
problem.AddResidualBlock(f, loss_function, para_Ex_Pose[0], para_Ex_Pose[1], para_Feature[feature_index], para_Td[0]);
bool ProjectionOneFrameTwoCamFactor::Evaluate(double const *const *parameters, double *residuals, double **jacobians) const
{
TicToc tic_toc;
// 优化变量:外参(左目),外参(右目),特征点逆深度,相机与IMU时差
Eigen::Vector3d tic(parameters[0][0], parameters[0][1], parameters[0][2]);
Eigen::Quaterniond qic(parameters[0][6], parameters[0][3], parameters[0][4], parameters[0][5]);
Eigen::Vector3d tic2(parameters[1][0], parameters[1][1], parameters[1][2]);
Eigen::Quaterniond qic2(parameters[1][6], parameters[1][3], parameters[1][4], parameters[1][5]);
double inv_dep_i = parameters[2][0];
double td = parameters[3][0];
// 匹配点ij, 归一化相机点时差校正,对应到采集时刻的位置,因为IMU数据是对应图像采集时刻的
Eigen::Vector3d pts_i_td, pts_j_td;
pts_i_td = pts_i - (td - td_i) * velocity_i;
pts_j_td = pts_j - (td - td_j) * velocity_j;
// 左目归一化相机点
Eigen::Vector3d pts_camera_i = pts_i_td / inv_dep_i;
// 左目IMU点
Eigen::Vector3d pts_imu_i = qic * pts_camera_i + tic;
Eigen::Vector3d pts_imu_j = pts_imu_i;
Eigen::Vector3d pts_camera_j = qic2.inverse() * (pts_imu_j - tic2);
Eigen::Map<Eigen::Vector2d> residual(residuals);
#ifdef UNIT_SPHERE_ERROR
residual = tangent_base * (pts_camera_j.normalized() - pts_j_td.normalized());
#else
double dep_j = pts_camera_j.z();
residual = (pts_camera_j / dep_j).head<2>() - pts_j_td.head<2>();
#endif
residual = sqrt_info * residual;
if (jacobians)
{
Eigen::Matrix3d ric = qic.toRotationMatrix();
Eigen::Matrix3d ric2 = qic2.toRotationMatrix();
Eigen::Matrix<double, 2, 3> reduce(2, 3);
#ifdef UNIT_SPHERE_ERROR
double norm = pts_camera_j.norm();
Eigen::Matrix3d norm_jaco;
double x1, x2, x3;
x1 = pts_camera_j(0);
x2 = pts_camera_j(1);
x3 = pts_camera_j(2);
norm_jaco << 1.0 / norm - x1 * x1 / pow(norm, 3), - x1 * x2 / pow(norm, 3), - x1 * x3 / pow(norm, 3),
- x1 * x2 / pow(norm, 3), 1.0 / norm - x2 * x2 / pow(norm, 3), - x2 * x3 / pow(norm, 3),
- x1 * x3 / pow(norm, 3), - x2 * x3 / pow(norm, 3), 1.0 / norm - x3 * x3 / pow(norm, 3);
reduce = tangent_base * norm_jaco;
#else
reduce << 1. / dep_j, 0, -pts_camera_j(0) / (dep_j * dep_j),
0, 1. / dep_j, -pts_camera_j(1) / (dep_j * dep_j);
#endif
reduce = sqrt_info * reduce;
if (jacobians[0])
{
Eigen::Map<Eigen::Matrix<double, 2, 7, Eigen::RowMajor>> jacobian_ex_pose(jacobians[0]);
Eigen::Matrix<double, 3, 6> jaco_ex;
jaco_ex.leftCols<3>() = ric2.transpose();
jaco_ex.rightCols<3>() = ric2.transpose() * ric * -Utility::skewSymmetric(pts_camera_i);
jacobian_ex_pose.leftCols<6>() = reduce * jaco_ex;
jacobian_ex_pose.rightCols<1>().setZero();
}
if (jacobians[1])
{
Eigen::Map<Eigen::Matrix<double, 2, 7, Eigen::RowMajor>> jacobian_ex_pose1(jacobians[1]);
Eigen::Matrix<double, 3, 6> jaco_ex;
jaco_ex.leftCols<3>() = - ric2.transpose();
jaco_ex.rightCols<3>() = Utility::skewSymmetric(pts_camera_j);
jacobian_ex_pose1.leftCols<6>() = reduce * jaco_ex;
jacobian_ex_pose1.rightCols<1>().setZero();
}
if (jacobians[2])
{
Eigen::Map<Eigen::Vector2d> jacobian_feature(jacobians[2]);
#if 1
jacobian_feature = reduce * ric2.transpose() * ric * pts_i * -1.0 / (inv_dep_i * inv_dep_i);
#else
jacobian_feature = reduce * ric.transpose() * Rj.transpose() * Ri * ric * pts_i;
#endif
}
if (jacobians[3])
{
Eigen::Map<Eigen::Vector2d> jacobian_td(jacobians[3]);
jacobian_td = reduce * ric2.transpose() * ric * velocity_i / inv_dep_i * -1.0 +
sqrt_info * velocity_j.head(2);
}
}
sum_t += tic_toc.toc();
return true;
}
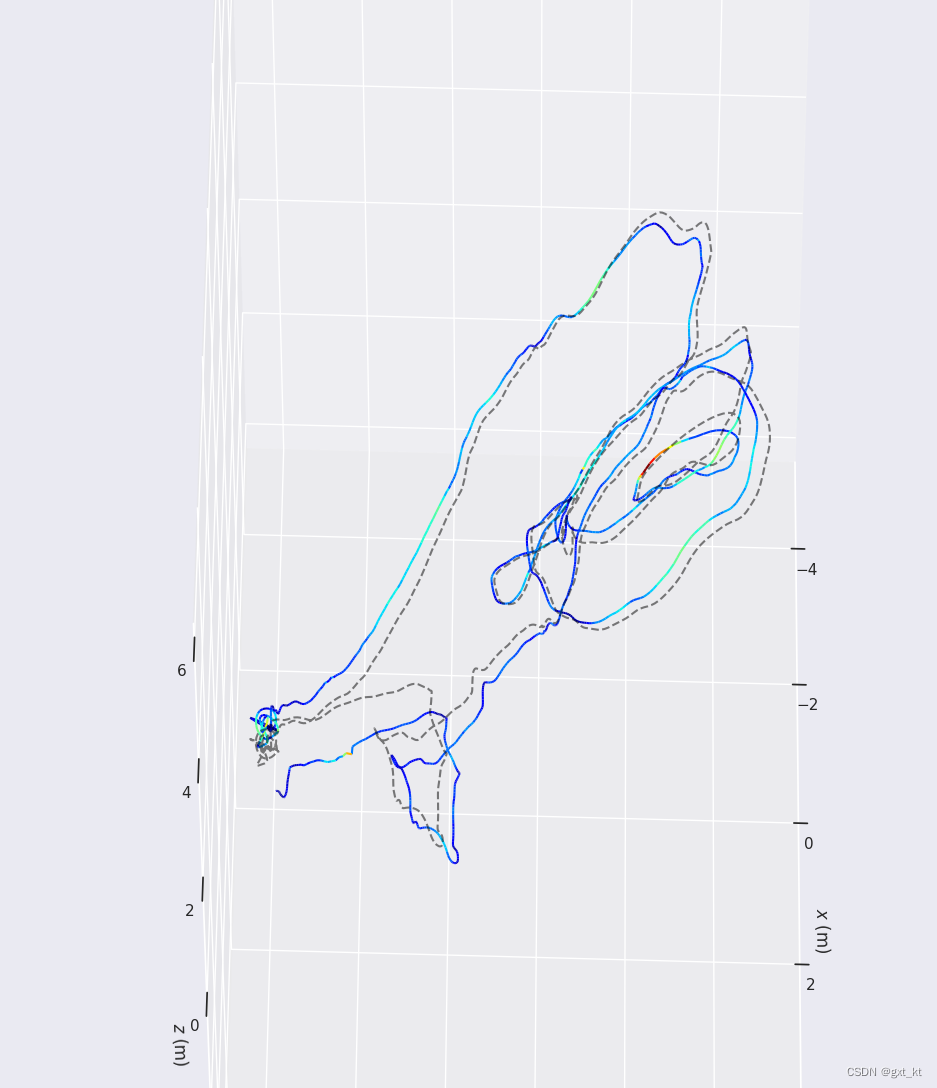
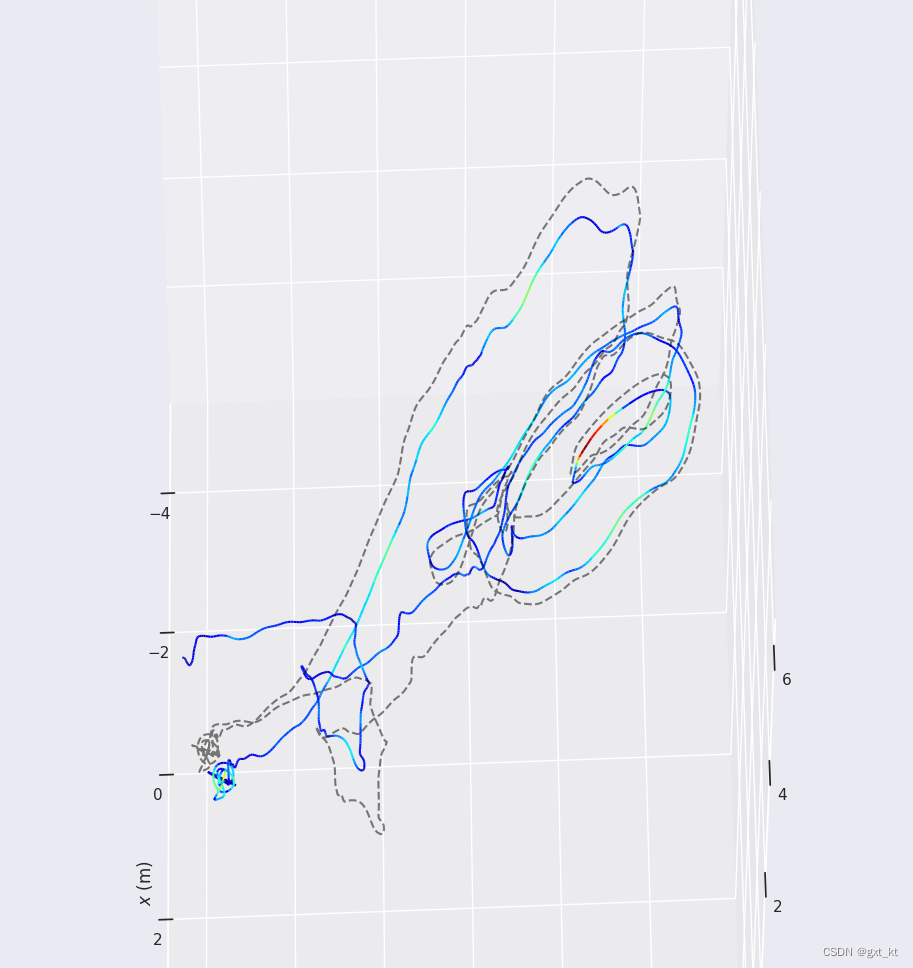
使用自己的BA替换ceres
下图显示的是双目+IMU,数据集是euroc的MH01

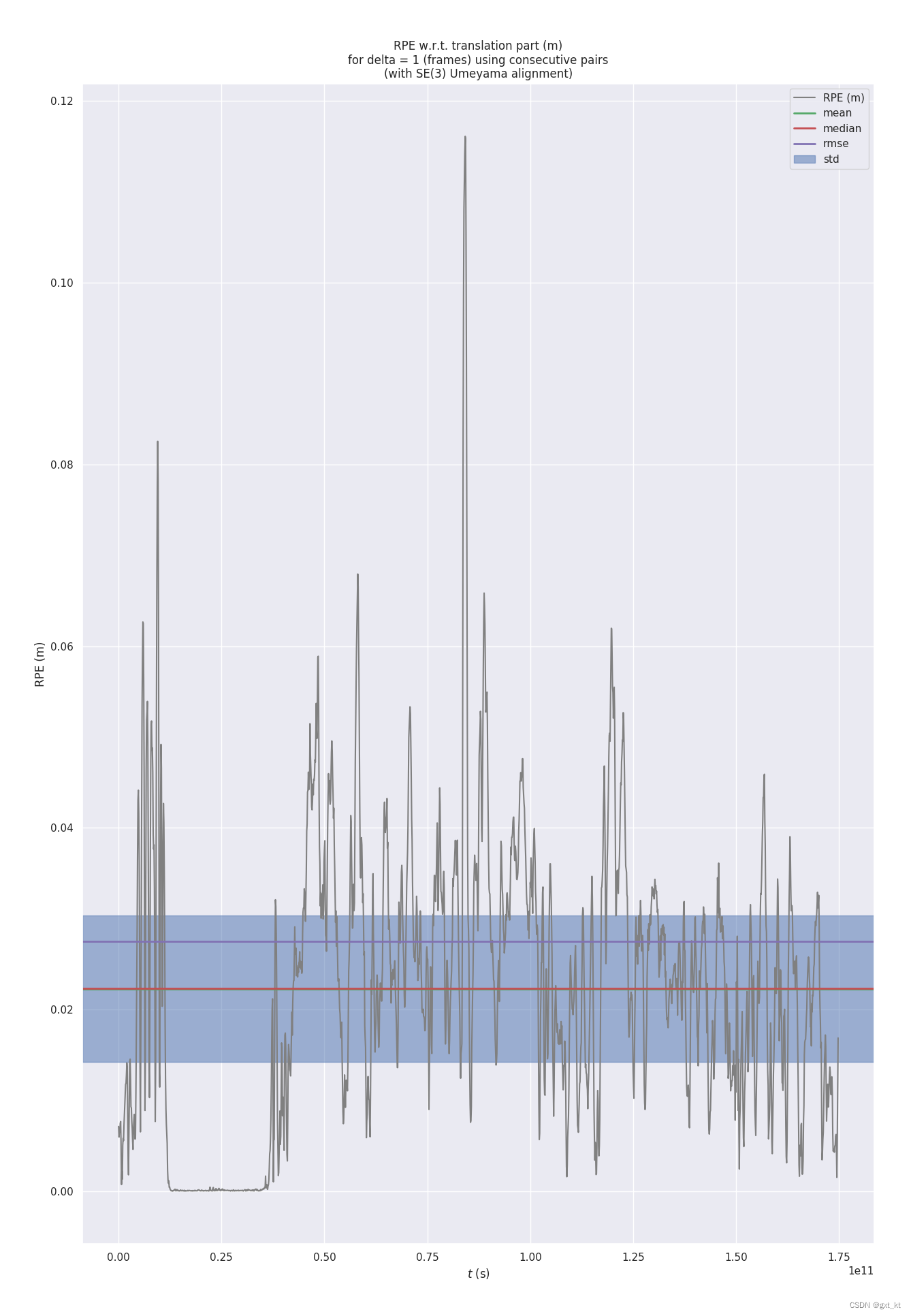
RPE w.r.t. translation part (m)
for delta = 1 (frames) using consecutive pairs
(with SE(3) Umeyama alignment)
max 0.116119
mean 0.022300
median 0.022353
min 0.000021
rmse 0.027533
sse 1.325852
std 0.016148
如果只使用双目,不使用IMU,出来的数据结果还是很差的
下面的是自己的BA
RPE w.r.t. translation part (m)
for delta = 1 (frames) using consecutive pairs
(with SE(3) Umeyama alignment)
max 0.130366
mean 0.022690
median 0.022445
min 0.000013
rmse 0.028078
sse 1.378852
std 0.016539
双目+IIMU ceres去掉先验,从DOGLEG改成LM
RPE w.r.t. translation part (m)
for delta = 1 (frames) using consecutive pairs
(with SE(3) Umeyama alignment)
max 0.128625
mean 0.022243
median 0.022075
min 0.000019
rmse 0.027585
sse 1.331591
std 0.016314















 630
630











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









