






Q-learning机器人路径规划算法
机器人路径规划,机器人路径避障。
求解常见的路径规划问题。
内含算法的注释,模块化编程,新手小白可快速入门。
ID:2929724925826852
Tchosenone1
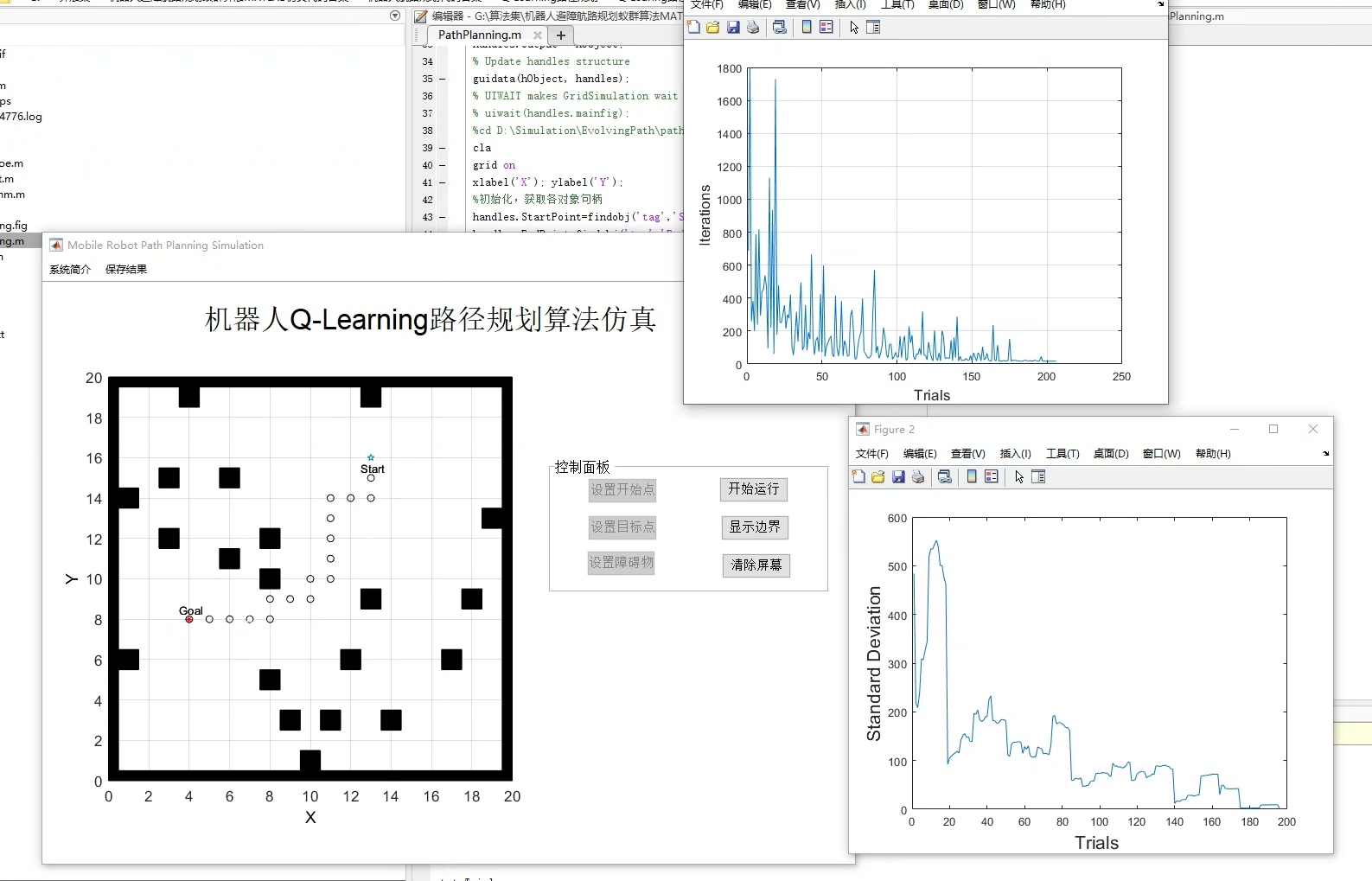
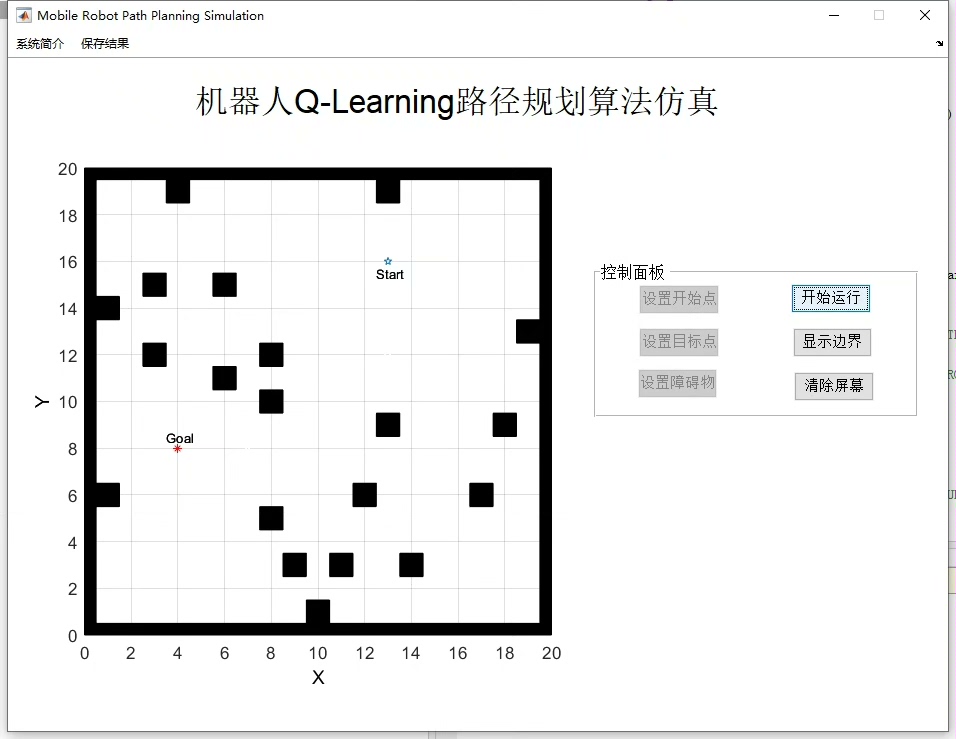
Q-learning是一种常用的强化学习算法,被广泛应用于机器人路径规划和避障问题的求解。在机器人领域,路径规划是一个关键任务,需要让机器人在复杂的环境中找到一条安全且高效的路径。而避障则是在路径规划的过程中避免碰撞障碍物的问题。
Q-learning算法是基于强化学习的一种方法,其核心思想是通过环境的反馈来不断修正机器人的行为策略,从而逐步优化路径规划的效果。它运用了贝尔曼方程和马尔可夫决策过程的理论,通过不断的迭代优化,可以得到最优的路径规划策略。
该算法的一大特点是可以实现模块化编程,使得新手小白也能够快速入门。模块化编程可以将整个算法分解成多个小的模块,每个模块只负责完成一个具体的功能。通过模块化编程,我们可以将算法的实现过程分解成多个小任务,使得每个任务更加简单明了,易于理解和调试。新手小白可以先从最基础的模块入手,逐步扩展和完善功能,提升自己的算法水平。
在Q-learning算法中,注释也是非常重要的一部分。注释可以帮助开发人员更好地理解算法的原理和实现过程,加速开发过程中的问题定位和修正。通过详细的注释,开发人员可以清楚地了解每个步骤的目的和意义,避免出现不必要的错误和重复工作。
Q-learning算法的应用并不局限于机器人路径规划,它在其他领域也有着广泛的应用。例如,在自动驾驶领域,Q-learning算法可以帮助车辆选择最佳的行驶路径,避免与其他车辆发生碰撞。在无人机领域,Q-learning算法可以帮助无人机避免障碍物,快速完成任务。在工业自动化领域,Q-learning算法可以优化机器人的动作策略,提高生产效率。可以说,Q-learning算法在现代智能机器人领域具有重要的地位和作用。
综上所述,Q-learning算法是一种常用的机器人路径规划和避障问题的解决方法。其具有模块化编程、注释详细、适合新手入门等特点。通过运用Q-learning算法,机器人可以在复杂环境中找到安全且高效的路径,避免与障碍物发生碰撞。该算法的应用不仅局限于机器人领域,还可以在其他领域发挥重要作用。通过深入研究和实践,我们可以进一步优化Q-learning算法,提高机器人路径规划和避障问题的求解效果。
【相关代码,程序地址】:http://fansik.cn/724925826852.html
















 2616
2616











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









