







LMS111-10100 在ROS上的测试与使用
准备工作
设备
硬件: LMS111-101000激光雷达
软件: ubuntu16.04 、 ROS
开始
设备连接
将激光雷达与处理器(电脑、工控机等)通过以太网连接好。
激光雷达默认的IP地址为192.168.0.1,需要修改激光雷达的IP地址的参考文献
http://www.mamicode.com/info-detail-2121458.html
在连接时首先需要将电脑与雷达相连的网口的IP地址设置为静态的,并且与激光雷达的IP地址处于同一个网段。在windows系统的上的设置参考上一个链接中的方法。
以下主要介绍在ubuntu系统中的方法:
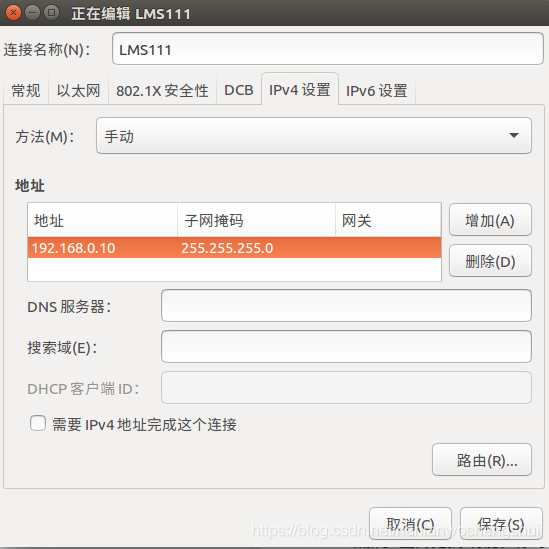
首先,打开网络链接,新增一个以太网连接,并设置好IPV4的IP地址,这个设置的地址就是网口的静态IP地址。图如下: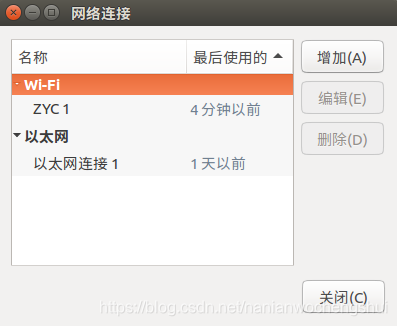
 检查能否跟雷达链接成功
检查能否跟雷达链接成功
ping 192.168.0.1
驱动安装
首先在本文章中默认的是安装好了ROS并且创建了工作空间的(catkin_ws)。
首先需要完成对激光雷达驱动的安装。
在catkin_ws 下的src目录下下载安装激光雷达驱动:
$ git clone https://github.com/clearpathrobotics/lms1xx.git
然后回到工作空间目录下,catkin_make一下:
修改IP地址
修改launch文件中的IP地址,修改为激光雷达的IP地址
首先:修改工作空间目录下下载的驱动包里面的launch文件中launch文件,将host修改为192.168.0.1
然后继续修改:
roscd lms1xx
sudo vi launch/LMS1xx.launch
将其中的host也修改为192.168.0.1
测试
看数据
在上一步完成后最好source以下工作空间
$ source catkin_ws/deve/setup.bash
然后运行:
$ roslaunch lms1xx LMS1xx.launch
然后打开一个新的终端,运行:
$ rostopic list
看一看有没有/scan话题,如果没有,就是驱动启动有问题。如果有,就运行
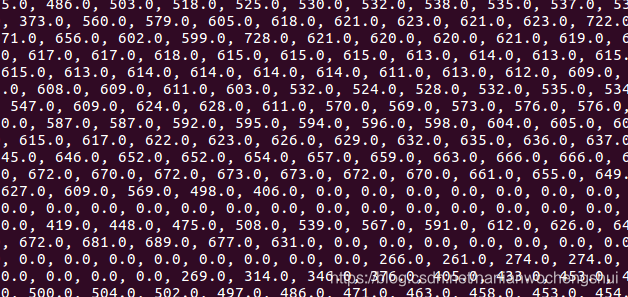
$ rostopic echo /scan
这样就可看到数据了。
可视化
关闭之前运行的 $ roslaunch lms1xx LMS1xx.launch
在一个新的终端运行roscore,启动ROS主节点。
然后新开一个终端运行:
rosrun lms1xx LMS1xx_node _host:=192.168.0.1
注意LMS1xx包中host参数默认地址为192.168.1.2,因此运行节点时需要给host参数赋予正确的IP地址,另外也可以自行指定激光雷达坐标系的名字(默认为laser)。
如果上面的过程没问题,运行LMS1xx_node节点后会提示连接到laser:

该节点会自动在scan话题上发布LaserScan消息,我们可以打开rviz查看激光扫描信息:
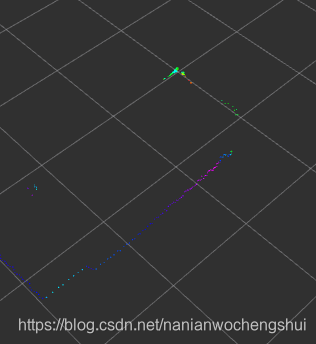 ¥¥¥¥¥¥注意¥¥¥¥¥:在可视化的时候由于世界坐标系与我们所定义的坐标系不一样,所以在开始的时候无法在RVIZ上看到东西。并且会报错:
¥¥¥¥¥¥注意¥¥¥¥¥:在可视化的时候由于世界坐标系与我们所定义的坐标系不一样,所以在开始的时候无法在RVIZ上看到东西。并且会报错:
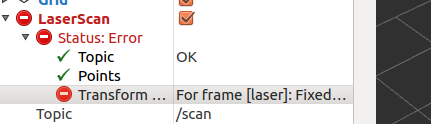
这时可以通过下面链接的方法进行修改解决:
https://blog.csdn.net/xu_fengyu/article/details/86562827















 4473
4473











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









