






 本文探讨了利用无人机技术进行森林巡检的必要性,介绍了传统巡检方式的局限性,着重分析了多无人机协同航迹规划的优势,包括提高效率、扩大覆盖范围和精确监测。文章详细描述了研究方法,包括森林场景建模、无人机运行特性分析、任务规划模型构建,以及综合考虑了地形、植被、水系和火险因素。最后,提出了研究路线和未来发展趋势,强调了这一技术在生态保护和资源管理中的潜力。
本文探讨了利用无人机技术进行森林巡检的必要性,介绍了传统巡检方式的局限性,着重分析了多无人机协同航迹规划的优势,包括提高效率、扩大覆盖范围和精确监测。文章详细描述了研究方法,包括森林场景建模、无人机运行特性分析、任务规划模型构建,以及综合考虑了地形、植被、水系和火险因素。最后,提出了研究路线和未来发展趋势,强调了这一技术在生态保护和资源管理中的潜力。
1.结合毕业设计(论文)课题任务情况,根据所查阅的文献资料,撰写1500~2000字左右的文献综述:
1.1研究背景
森林资源作为地球上最重要的自然资源之一,对于维持生态平衡、保护生物多样性、减缓气候变化等方面起着至关重要的作用。然而,森林资源面临着火灾、病虫害、非法砍伐等多种威胁,这些威胁不仅对森林本身构成破坏,也对人类社会和自然环境带来严重影响。
森林巡检是指利用无人机技术对森林进行定期或不定期的巡查监测,以发现森林内部的异常情况,如森林火灾、盗伐等,及时采取相应的应对措施,保护森林资源和生态环境。传统的森林巡检方式通常由地面人员或少量载人飞机进行,但受限于人力资源和技术手段,无法覆盖大范围的森林区域,并且在应对突发事件时反应较慢。而随着无人机技术的发展,无人机技术以其独特的优势在军事、民用、商业等多个领域得到了广泛应用。无人机技术的快速发展使得无人机在森林巡检中得到了广泛的应用。现代无人机具有较长的续航能力、高分辨率的传感器、自主飞行能力等优势,可以在森林区域进行高效、精确的巡检监测。森林资源的保护和管理对于及时发现森林火灾、病虫害等异常情况具有重要意义。传统的巡检方式存在覆盖范围有限、反应速度慢等问题,需要更加高效、快速的巡检方式来满足实际需求。
森林巡检的环境复杂多变,包括山区、密林、峡谷等地形,以及不确定的天气条件等,需要无人机具备良好的适应能力和飞行性能。同时,巡检任务的多样性,如火灾监测、病虫害识别、野生动物保护等,要求无人机能够灵活调整航迹以适应不同的任务需求。无人机的续航能力、载荷能力和通信范围有限,如何在有限的资源条件下实现高效的巡检覆盖,是多无人机协同航迹规划需要解决的关键问题。此外,多无人机协同作业时的路径重叠、任务冲突等问题也严重影响了巡检效率。在多无人机协同作业中,如何确保无人机之间的安全距离,避免碰撞,同时实现有效的信息共享和任务协同,是确保巡检任务顺利进行的重要前提。
1.2研究意义
传统的森林巡检方式受限于人力资源和技术手段,覆盖范围有限且反应速度慢。采用多无人机协同航迹规划可以实现多台无人机同时进行巡检监测,大幅提高了巡检的效率和覆盖范围,使得更广泛的森林区域得到监测和保护;多无人机协同航迹规划可以通过高分辨率传感器和先进的图像处理算法,实现对森林内部细微变化的监测和分析。相比传统的人工巡检方式,无人机能够提供更加准确、及时的数据信息,有助于发现森林内部的火灾、病虫害等异常情况,及时采取措施进行应对,从而保护森林资源;无人机巡检可以避免人员进入复杂和危险的森林环境,减少了人员的安全风险。同时,相比传统的有人飞机或直升机巡检,无人机具有低成本、低飞行风险和更长的续航能力等优势,能够更加经济高效地完成森林巡检任务;多无人机协同航迹规划可以快速响应森林内部的突发事件,如火灾、盗伐等,实现及时的监测和处置。多无人机同时作业可以快速覆盖大范围的森林区域,及时发现和定位火灾等危害,有助于采取有效措施进行扑救和应急处理,最大程度地减少损失;多无人机协同航迹规划作为无人机领域的前沿研究方向,对于无人机技术和航迹规划算法的研究具有重要意义。通过不断优化航迹规划算法、提高无人机协同工作效率,可以推动无人机技术的发展和应用,促进科技创新和产业升级;多无人机巡检能够持续积累大量的森林监测数据,包括火灾发生频率、病虫害分布情况、森林生长状况等信息。这些数据可以被用于进一步的分析和研究,为森林资源管理和生态保护提供科学依据。
1.3国内外研究现状
张思宇[1]强调了无人机在军事和民用领域的重要性,并提出了在复杂环境下提高无人机的快速反应能力、控制性能和协同程度的需求。研究提出了单无人机航迹规划算法和多无人机协同航迹规划算法,并针对四旋翼无人机模型设计了内回路控制策略。
侯捷等[2]系统梳理了多无人机协同航迹规划的研究现状,归纳了现有方法,并从仿真地图搭建、协同评价指标明确和规划算法选择三个方面阐述了实现方法。研究展望了提高无人机群自主性、协同性和规划算法性能的发展趋势。
蔡星娟等[3]提出了一种多无人机协同航迹规划方法,该方法基于高维多目标优化,旨在同时优化多无人机航迹的多种性能。研究还提出了一种改进的NSGA-III算法,以提高多无人机协同航迹规划的性能。
赵军民等[4]针对多无人机在密集障碍环境中协同执行地面目标跟踪任务时的避障能力不足问题,提出了一种基于零空间方法的多无人机目标跟踪与避障联合航迹规划算法。研究通过仿真分析验证了该方法的有效性。
张增等[5]利用无人机搭载的高清摄像头,通过RGB颜色空间分析,采用HSV颜色空间和Otsu算法对火情区域进行分割,以获得更完整的火灾区域图像,进行森林火灾的监测。
潘楠等[6]提出了一种多无人机协同航迹规划算法,通过改进乌鸦搜索和快速遍历随机树算法,提高了城市巡防任务的效率和覆盖率,降低了能耗。
Tingting Yang等[7]提出了一种基于无人机(UAVs)和无人水面船只(USVs)的群体移动计算网络的海上搜救方法,使用强化学习(RL)规划搜索路径,提高通信吞吐量。
Sarah Ismail等[8]提出了一种基于匈牙利算法的去中心化任务分配算法,用于无人机(UAVs)网络。
Hu J 等[9]提出了一种基于动态Voronoi分区的多机器人自主探索策略,用于未知环境中的协作探索,并引入了深度强化学习(DRL)算法来处理环境中的突发障碍物,提高了学习速度和性能。
Bhowmick P等[10]提出了一种网络化移动机器人的群组协调控制方案,用于执行复杂的现实世界任务,如物体运输。
Zhen Z等[11]研究了基于智能自组织算法的多无人机(multi-UAV)协同搜索-攻击任务规划问题;提出了一个分布式优化模型,通过信息交换使每个无人机解决自己的局部优化问题。
Liu H等[12]针对受切换拓扑影响的多四旋翼(quadrotors)编队跟踪控制问题,提出了一种鲁棒控制方法。
Hu J等[13]提出了一种分布式自适应时变群组编队跟踪控制协议,用于有向图上的多智能体系统(MAS)。该协议允许智能体被分成多个子组,每个子组围绕各自的领导者实现预定的子编队。
[1]张思宇. 多无人机协同航迹规划及其控制方法研究[D].北京理工大学,2018.
[2]侯捷,李博威,念诚等.多架无人机协同航迹规划研究综述[J].金属世界,2019(02):24-27+30.
[3]蔡星娟,胡钊鸣,张志霞等.基于高维多目标优化的多无人机协同航迹规划[J].中国科学:信息科学,2021,51(06):985-996.
[4]赵军民,何浩哲,王少奇等.复杂环境下多无人机目标跟踪与避障联合航迹规划[J].兵工学报,2023,44(09):2685-2696.
[5]张增,王兵,伍小洁等.无人机森林火灾监测中火情检测方法研究[J].遥感信息,2015,30(01):107-110+124.
[6]潘楠,张淼寒,韩宇航等.面向城市巡防的多无人机协同航迹规划[J].信息与控制,2022,51(04):411-422.DOI:10.13976/j.cnki.xk.2022.0319.
[7]Yang T, Jiang Z, Sun R, 等. Maritime Search and Rescue Based on Group Mobile Computing for Unmanned Aerial Vehicles and Unmanned Surface Vehicles[J]. IEEE Transactions on Industrial Informatics, 2020, 16(12): 7700–7708.
[8]Ismail S , Sun L .Decentralized hungarian-based approach for fast and scalable task allocation[C]//2017 International Conference on Unmanned Aircraft Systems (ICUAS).2017.DOI:10.1109/ICUAS.2017.7991447.
[9]Hu J , Niu H , Carrasco J ,et al.Voronoi-Based Multi-Robot Autonomous Exploration in Unknown Environments via Deep Reinforcement Learning[J].IEEE Transactions on Vehicular Technology, 2020, PP(99).DOI:10.1109/TVT.2020.3034800.
[10]Hu J , Bhowmick P , Lanzon A .Group Coordinated Control of Networked Mobile Robots With Applications to Object Transportation[J].IEEE Transactions on Vehicular Technology, 2021(8).DOI:10.1109/TVT.2021.3093157.
[11]Zhen Z , Xing D , Gao C .Cooperative search-attack mission planning for multi-UAV based on intelligent self-organized algorithm[J].Aerospace Science & Technology, 2018, 76:402-411.DOI:10.1016/j.ast.2018.01.035.
[12]Liu H , Wang Y , Lewis F L ,et al.Robust Formation Tracking Control for Multiple Quadrotors Subject to Switching Topologies[J].IEEE Transactions on Control of Network Systems, 2020, 7(3):1319-1329.DOI:10.1109/TCNS.2020.2976271.
[13]Hu J , Bhowmick P , Lanzon A .Distributed Adaptive Time-Varying Group Formation Tracking for Multiagent Systems With Multiple Leaders on Directed Graphs[J].IEEE Transactions on Control of Network Systems, 2020, 7(1):140-150.DOI:10.1109/TCNS.2019.2913619.
2.毕业设计任务要研究或解决的问题和拟采用的方法:
2.1主要研究内容
在近年来,随着无人机技术的迅速发展,其在各个领域的应用日益广泛,其中就包括森林巡检。本研究旨在针对森林巡检任务的特点和需求,结合无人机的运行特性,设计一套多无人机协同航迹规划系统,以提高巡检效率、降低成本,并最大程度地保障森林资源的安全。本文的主要研究内容分为以下几个部分:
2.1.1森林场景建模
森林地区的地形、植被分布、水源分布等因素对无人机巡检任务的执行有着重要影响。通过遥感技术获取森林地区的高分辨率遥感影像,并利用图像处理技术对场景进行分析和特征提取。采用图像分割、目标检测等算法,提取森林地区的道路网络、河流分布、林火迹象等关键信息,为后续任务规划提供精准的环境特征数据支持。
2.1.2无人机运行特性分析
无人机的运行特性直接影响到巡检任务的实施效果和效率。首先,需要对不同类型的无人机平台进行分类和选型,考虑到其载荷能力、续航能力、飞行速度等参数。其次,根据森林巡检的实际需求,分析无人机的适航性和适应性,包括对复杂地形、风速、飞行高度等环境因素的应对能力。最后,结合无人机的传感器装备和通信系统,评估其在森林环境下的感知和通信能力,以及对障碍物避让和飞行安全的保障能力。
2.1.3多无人机任务规划模型建立
多无人机任务规划模型的建立是研究的核心。首先,需要对森林巡检区域进行合理的划分,以便将整个巡检任务分解成多个子任务。划分的依据可以是地理位置、植被密度、风险程度等因素。接着,针对每个子任务设计相应的无人机航线规划方案,考虑到航线的长度、高度、速度等因素,以及避障策略和飞行安全。最后,通过任务调度和分配策略,将不同的无人机指派到合适的任务区域,保证整个巡检任务的高效完成。
2.2研究方法
2.2.1场景分析与特性建模
森林地区的地形复杂多样,包括山地、丘陵、河谷等地貌类型。地形的高低起伏、山脉的延伸和河流的分布都对无人机的飞行路径和航迹规划提出了挑战。通过地理信息系统(GIS)技术,获取并分析森林地区的数字高程模型(DEM),描绘出地形的立体图像,为无人机飞行路径规划提供高度数据支持;森林地区的植被分布密集,不同种类的树木、灌木和草丛交织在一起,形成了复杂的植被结构。植被的密集度、高度和种类对无人机的飞行安全和传感器探测提出了挑战。利用遥感技术获取高分辨率的植被覆盖影像,并采用图像分割和分类算法,对不同类型的植被进行识别和提取,以建立森林地区的植被分布图,为无人机航迹规划提供环境特征数据;森林地区的水系分布广泛,包括河流、溪流、湖泊等水体。水体的分布和流向对森林火灾的发生和蔓延具有重要影响,也对无人机的飞行路径和航迹规划提出了挑战。通过遥感影像和地理信息数据,获取森林地区水系分布图,分析水体的流向和汇聚情况,为无人机在森林地区的飞行路径规划和任务执行提供水源信息和风险评估;森林地区火险性较高,特别是在干燥季节和高温天气下,易发生林火。火险区域的分布和火情的预测对无人机的巡检任务具有重要意义。通过遥感技术获取火险区域的环境特征数据,包括植被类型、湿度、风向等信息,结合气象数据和火灾历史记录,建立火险区域分布模型和火情预测模型,为无人机巡检任务的规划和实施提供预警和指导。将以上获取的森林地区的环境特征数据进行整合和分析,建立完整的环境特征数据库。利用地理信息系统(GIS)和数据挖掘技术,对环境特征数据进行空间分析和统计分析,揭示森林地区的空间分布规律和特征变化趋势,为无人机巡检任务的航迹规划和执行提供科学依据和决策支持。
2.2.2无人机运行特性分析与选型
根据森林巡检任务的需求和场景特点,分析无人机的运行特性和选型要求。无人机的飞行性能直接影响到其在森林巡检任务中的效率和覆盖范围,重点是无人机的最大飞行时间、飞行速度、有效载荷和飞行高度等参数,以满足森林巡检任务的需求;森林地区地形复杂,无人机需要具备良好的机动性,包括悬停能力、快速转向和躲避障碍物的能力,分析无人机的操控性能和自稳定性,确保其能够应对各种复杂环境下的飞行任务;无人机需要搭载多种传感器来获取森林地区的环境信息,包括高分辨率摄像头、红外线热成像仪、激光雷达等,分析不同传感器的性能和适用范围,选择最合适的传感器配置组合,以实现对森林环境的全面监测和探测;无人机需要与地面指挥中心和其他无人机进行实时通信和协同作战,同时需要具备良好的导航定位能力,以确保飞行路径的准确性和稳定性,分析无人机的通信系统和导航系统,评估其在森林环境中的可靠性和适应性。在经过以上的综合考量与分析之后,确定无人机的选型与配置。
2.2.3多无人机任务规划模型建立
基于场景分析和特性建模的结果,建立适用于森林巡检的多无人机任务规划模型。这包括分析森林巡检任务的具体需求和目标,包括巡检区域范围、任务时间窗口、巡检目标优先级等;对不同航迹路径进行代价评估,考虑到航迹长度、飞行时间、能耗消耗、通信延迟等因素。建立航迹代价模型,评估每条航迹路径的优劣,并确定最优航迹路径的选择标准;考虑巡检任务的成本因素,包括人力资源、时间成本、能源消耗等,建立巡检成本模型。通过对巡检成本的分析,优化多无人机的任务规划,以降低整体巡检成本;考虑多无人机之间的协同作战和协同飞行,建立多无人机的协同程度模型。通过协同程度分析,优化无人机的任务分配和航迹规划,提高巡检任务的执行效率和覆盖范围; 基于以上分析结果,设计多无人机任务规划的优化算法。通过以上各个步骤,可以建立起多无人机任务规划模型,为森林巡检任务的高效执行提供理论支持和技术保障。
本文研究路线如图1所示:
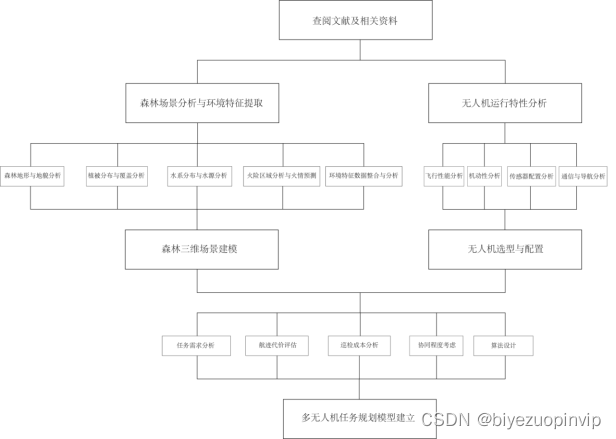
图1

















 1495
1495

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









