




 这篇博客详细介绍了ORB-SLAM2系统中单目初始化的过程,包括特征点匹配、归一化处理、以及如何通过RANSAC算法计算单应矩阵H和基础矩阵F。在匹配不足时,系统会删除初始化器并重新尝试。通过随机选取点集,利用8点法计算H或F,并结合重投影误差评估内点,最终选择最佳的单应矩阵进行地图点初始化。
这篇博客详细介绍了ORB-SLAM2系统中单目初始化的过程,包括特征点匹配、归一化处理、以及如何通过RANSAC算法计算单应矩阵H和基础矩阵F。在匹配不足时,系统会删除初始化器并重新尝试。通过随机选取点集,利用8点法计算H或F,并结合重投影误差评估内点,最终选择最佳的单应矩阵进行地图点初始化。
ORB-SLAM2
一、代码
在特征点提取与匹配完成后,回到Tracking.cc中
if(nmatches<100)//判断,如果特征匹配的数目小于100的话
{
delete mpInitializer;//那么就删除这个初始化器。重新开始初始化
mpInitializer = static_cast<Initializer*>(NULL);
return;
}
v::Mat Rcw; // Current Camera Rotation
cv::Mat tcw; // Current Camera Translation
vector<bool> vbTriangulated; // Triangulated Correspondences (mvIniMatches特征点是否成功三角化?
//H或F进行初始化,得到相对运动,初始化地图点
if(mpInitializer->Initialize(mCurrentFrame, mvIniMatches, Rcw, tcw, mvIniP3D, vbTriangulated))
{
for(size_t i=0, iend=mvIniMatches.size(); i<iend;i++)
{
if(mvIniMatches[i]>=0 && !vbTriangulated[i])
{
mvIniMatches[i]=-1;
nmatches--;
}
}
进入Initialize()函数
bool Initializer::Initialize(const Frame &CurrentFrame, const vector<int> &vMatches12, cv::Mat &R21, cv::Mat &t21, vector<cv::Point3f> &vP3D, vector<bool> &vbTriangulated)
//传入的参数是:当前帧,当前帧与参考帧的匹配、R,t,三角化成功的点
{
// Fill structures with current keypoints and matches with reference frame
// Reference Frame: 1, Current Frame: 2
mvKeys2 = CurrentFrame.mvKeysUn;//将当前帧去畸变后的图像特征点传给mvkeys2
mvMatches12.clear();//清空mvMatches12,记录匹配特征点对的
mvMatches12.reserve(mvKeys2.size());//将它的大小转化为mvkeys的大小
mvbMatched1.resize(mvKeys1.size());//记录参考帧1中是否有匹配的特诊点
for(size_t i=0, iend=vMatches12.size();i<iend; i++)//遍历匹配完的特征点数量,里面存的是当前帧与第一帧匹配点的索引值
{
if(vMatches12[i]>=0)//如果里面有值的化
{
mvMatches12.push_back(make_pair(i,vMatches12[i]));//把关键帧1中的索引与帧2中的索引pair起来
mvbMatched1[i]=true;//;标记帧1中的特征点有匹配关系
}
else
mvbMatched1[i]=false;//否则匹配不上
}
const int N = mvMatches12.size();//定义匹配点的个数,也就是F1中与F2中的匹配点的匹配关系的索引
// Indices for minimum set selection
vector<size_t> vAllIndices;//存储特征点的索引,并分配大小,8点法
vAllIndices.reserve(N);
vector<size_t> vAvailableIndices;//RANSAC中某次迭代,样本索引
for(int i=0; i<N; i++)
{
vAllIndices.push_back(i);//索引对应第一帧与第二帧的匹配索引
}
// Generate sets of 8 points for each RANSAC iteration
mvSets = vector< vector<size_t> >(mMaxIterations,
vector<size_t>(8,0));//RANSAC最大迭代次数,
DUtils::Random::SeedRandOnce(0);//随机选取样本。随机种子数
for(int it=0; it<mMaxIterations; it++)//循环迭代次数<200次
{
vAvailableIndices = vAllIndices;//索引对应第一帧与第二帧的匹配索引,都是可用的
// Select a minimum set
for(size_t j=0; j<8; j++)//选取8个点
{
int randi = DUtils::Random::RandomInt(0,vAvailableIndices.size()-1);//在0到最大匹配点的个数之间随机选取数目
int idx = vAvailableIndices[randi];//将选择的点的索引传给idx
mvSets[it][j] = idx;//本次迭代对应的第J个索引存到mvSet中,it表示第几次迭代,j表示选择点的索引
vAvailableIndices[randi] = vAvailableIndices.back();//用最后一个元素将选中元素进行覆盖
vAvailableIndices.pop_back();//删除最后一个元素
}
}//迭代200次,每次选择8个点
vector<bool> vbMatchesInliersH, vbMatchesInliersF;//记录哪些点是内点
float SH, SF;//记录计算后的评分
cv::Mat H, F;
//开两个线程来加速计算
thread threadH(&Initializer::FindHomography,this,ref(vbMatchesInliersH), ref(SH), ref(H));
thread threadF(&Initializer::FindFundamental,this,ref(vbMatchesInliersF), ref(SF), ref(F));
//等待线程结束
threadH.join();
threadF.join();
float RH = SH/(SH+SF);//这边是计算评分,
if(RH>0.40)//如果评分大于0.4用H阵来恢复
return ReconstructH(vbMatchesInliersH,H,mK,R21,t21,vP3D,vbTriangulated,1.0,50);
else //if(pF_HF>0.6)否则F阵
return ReconstructF(vbMatchesInliersF,F,mK,R21,t21,vP3D,vbTriangulated,1.0,50);
return false;
}
如何计算H阵F阵类似
//1.将当前帧与参考帧的特征点进行归一化
//2.选择8个归一化后的点进行迭代
//3.八点法计算
//4.利用重投影误差来计算RANSAC的评分
//5.保存最优结果
void Initializer::FindHomography(vector<bool> &vbMatchesInliers, float &score, cv::Mat &H21)
{//传参:标记是否为外点?单应阵的得分、单应阵结果
// Number of putative matches
const int N = mvMatches12.size();//匹配特诊点的总数
// Normalize coordinates
vector<cv::Point2f> vPn1, vPn2;//开始进行归一化
cv::Mat T1, T2;
Normalize(mvKeys1,vPn1, T1);//进行归一化
Normalize(mvKeys2,vPn2, T2);
cv::Mat T2inv = T2.inv();//反归一化
// Best Results variables
score = 0.0;//计算最佳评分
vbMatchesInliers = vector<bool>(N,false);//最佳评分是特诊点对应的内点,默认是false
// Iteration variables
vector<cv::Point2f> vPn1i(8);//某次迭代中的参考帧对应的坐标
vector<cv::Point2f> vPn2i(8);//某次迭代中当前帧对应的坐标
cv::Mat H21i, H12i;//H阵与其逆
vector<bool> vbCurrentInliers(N,false);//当前帧内点
float currentScore;
// Perform all RANSAC iterations and save the solution with highest score
for(int it=0; it<mMaxIterations; it++)//开始迭代200个
{
// Select a minimum set
for(size_t j=0; j<8; j++)
{
int idx = mvSets[it][j];//刚刚选取的八个点
vPn1i[j] = vPn1[mvMatches12[idx].first];//帧1特征点索引,归一化的点
vPn2i[j] = vPn2[mvMatches12[idx].second];//帧2的索引
}
cv::Mat Hn = ComputeH21(vPn1i,vPn2i);//8点法进行计算,这边是归一化后的点进行单应矩阵的计算
H21i = T2inv*Hn*T1;//keypoints去除归一化
H12i = H21i.inv();//计算逆
currentScore = CheckHomography(H21i, H12i, vbCurrentInliers, mSigma);//利用重投影误差来对这次进行评分,进入
if(currentScore>score)
{
H21 = H21i.clone();
vbMatchesInliers = vbCurrentInliers;
score = currentScore;
}
}
}
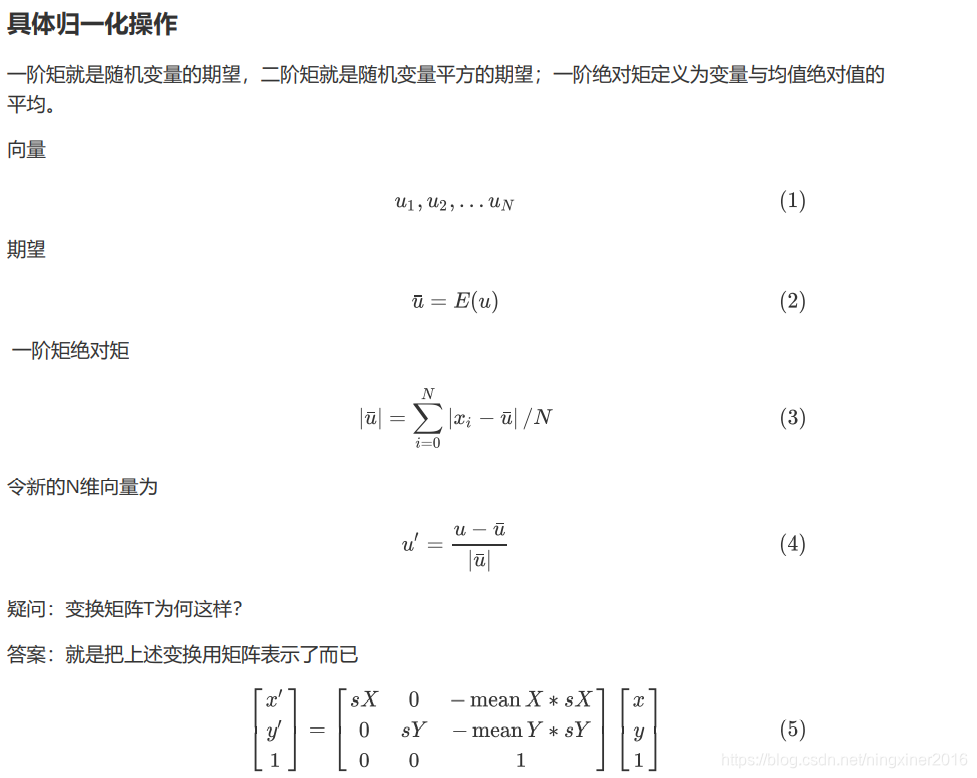
归一化函数
void Initializer::Normalize(const vector<cv::KeyPoint> &vKeys, vector<cv::Point2f> &vNormalizedPoints, cv::Mat &T)
//传参关键点、归一化点的坐标、变换阵
{
float meanX = 0;
float meanY = 0;
const int N = vKeys.size();
vNormalizedPoints.resize(N);//所有关键点数量大小
for(int i=0; i<N; i++)
{
meanX += vKeys[i].pt.x;//关键点x坐标相加
meanY += vKeys[i].pt.y;//y坐标相加
}
meanX = meanX/N;//取均值
meanY = meanY/N;
float meanDevX = 0;
float meanDevY = 0;
for(int i=0; i<N; i++)
{
vNormalizedPoints[i].x = vKeys[i].pt.x - meanX;//所有的x点距离均值的大小
vNormalizedPoints[i].y = vKeys[i].pt.y - meanY;
meanDevX += fabs(vNormalizedPoints[i].x);//将距离均值大小都加起来
meanDevY += fabs(vNormalizedPoints[i].y);
}
meanDevX = meanDevX/N;//用这个距离总和再除以特征点数
meanDevY = meanDevY/N;
float sX = 1.0/meanDevX;//为变换做准备
float sY = 1.0/meanDevY;
for(int i=0; i<N; i++)
{
vNormalizedPoints[i].x = vNormalizedPoints[i].x * sX;
vNormalizedPoints[i].y = vNormalizedPoints[i].y * sY;
}
T = cv::Mat::eye(3,3,CV_32F);//转换为矩阵形式
T.at<float>(0,0) = sX;
T.at<float>(1,1) = sY;
T.at<float>(0,2) = -meanX*sX;
T.at<float>(1,2) = -meanY*sY;
}
进入CheckHomography()函数选择最佳的H阵
//对给定的H阵来进行评分,需要使用卡方检验
float Initializer::CheckHomography(const cv::Mat &H21, const cv::Mat &H12, vector<bool> &vbMatchesInliers, float sigma)//传参:参考帧到当前帧的H、当前帧到参考帧的H、匹配好的特侦点对的Inliner的标记、估计误差方差,默认为1
{
/*
输入 H21 H12 匹配点集mvkeys1
for p1(i) p2(i) mvkeys1 p1 p2是进行逆归一化后的keypoints
e1=||p2(i)-H21*p2(i)||2 重投影误差
e2=||p1(i)-H12*p1(i)||2
w1=1/(sigma*sigma)
w2=1/(sigma*sigma)
if e1<th
score+=th-e1*w1
if e2<th
score+=th-e2*w2
*/
const int N = mvMatches12.size();//特征点匹配的数目
const float h11 = H21.at<float>(0,0);//获取参考帧到当前帧的H阵的各个元素
const float h12 = H21.at<float>(0,1);
const float h13 = H21.at<float>(0,2);
const float h21 = H21.at<float>(1,0);
const float h22 = H21.at<float>(1,1);
const float h23 = H21.at<float>(1,2);
const float h31 = H21.at<float>(2,0);
const float h32 = H21.at<float>(2,1);
const float h33 = H21.at<float>(2,2);
const float h11inv = H12.at<float>(0,0);//获取当前帧到参考帧的H阵的各个元素
const float h12inv = H12.at<float>(0,1);
const float h13inv = H12.at<float>(0,2);
const float h21inv = H12.at<float>(1,0);
const float h22inv = H12.at<float>(1,1);
const float h23inv = H12.at<float>(1,2);
const float h31inv = H12.at<float>(2,0);
const float h32inv = H12.at<float>(2,1);
const float h33inv = H12.at<float>(2,2);
}
vbMatchesInliers.resize(N);//给特诊点的outlier标记预分配的
float score = 0;
const float th = 5.991;//卡方检验的阈值(假设有一个像素的偏差)
const float invSigmaSquare = 1.0/(sigma*sigma);//平方差的倒数
for(int i=0; i<N; i++)
{
bool bIn = true;//默认都是inlier
const cv::KeyPoint &kp1 = mvKeys1[mvMatches12[i].first];//提取参考帧与当前帧的匹配点对
const cv::KeyPoint &kp2 = mvKeys2[mvMatches12[i].second];
const float u1 = kp1.pt.x;//keypoints的坐标
const float v1 = kp1.pt.y;
const float u2 = kp2.pt.x;
const float v2 = kp2.pt.y;
// Reprojection error in first image
// x2in1 = H12*x2
//计算F2到F1的重投影误差
const float w2in1inv = 1.0/(h31inv*u2+h32inv*v2+h33inv);//H阵的推导计算公式
const float u2in1 = (h11inv*u2+h12inv*v2+h13inv)*w2in1inv;
const float v2in1 = (h21inv*u2+h22inv*v2+h23inv)*w2in1inv;
const float squareDist1 = (u1-u2in1)*(u1-u2in1)+(v1-v2in1)*(v1-v2in1);//重投影
const float chiSquare1 = squareDist1*invSigmaSquare;//卡方?
if(chiSquare1>th)//如果大于阈值就算作是离群点
bIn = false;
else
score += th - chiSquare1;//否则内点累计得分,阈值-卡方值,误差越大得分越低
// Reprojection error in second image
// x1in2 = H21*x1
//反向计算
const float w1in2inv = 1.0/(h31*u1+h32*v1+h33);
const float u1in2 = (h11*u1+h12*v1+h13)*w1in2inv;
const float v1in2 = (h21*u1+h22*v1+h23)*w1in2inv;
const float squareDist2 = (u2-u1in2)*(u2-u1in2)+(v2-v1in2)*(v2-v1in2);
const float chiSquare2 = squareDist2*invSigmaSquare;
if(chiSquare2>th)
bIn = false;
else
score += th - chiSquare2;
if(bIn)
vbMatchesInliers[i]=true;
else
vbMatchesInliers[i]=false;
}
return score;
}

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









