







初学ROS,这里把出现的问题及对应解决方案汇总一下。
1.使用 rosrun rviz rviz -d ‘rospack find rbx_nav’/nav.rviz 命令是出现错误:
[ INFO] [1470228247.659509274]: OpenGl version: 2.1 (GLSL 1.2).
Segmentation fault (core dumped)

解决方案:关于opengl这一块出问题了,执行命令:
export LIBGL_ALWAYS_SOFTWARE=1
2.接问题1,对于这个问题还有一点就是执行命令的路径中若带有'rospack find rbx_nav' 即使没有报错,也能打开rviz,但是.rviz配置文件并没有加载。这里也可先执行一下rospack find rbx_nav 看一下绝对路径,然后使用绝对路径代替rosrun xxx命令行中的'rospack find rbx_nav'。如图:
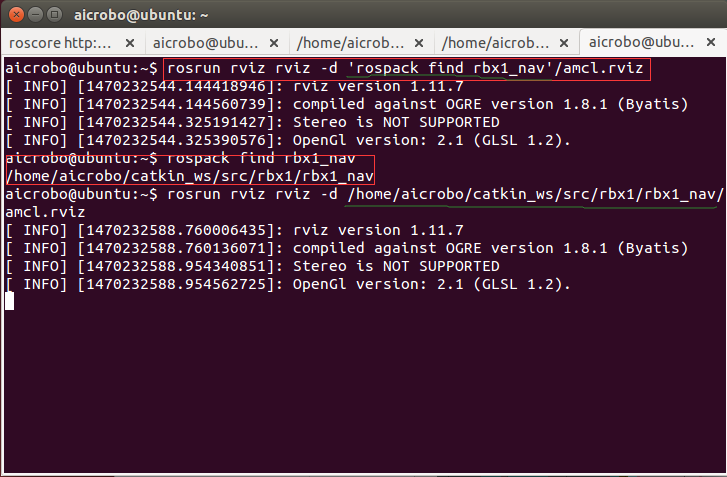
第一遍执行的时候虽然能打开rviz,但是并没有正确加载.rviz的配置文件;第二遍改用绝对路径后是可以的。
3. 下载或安装库等文件的时候会失败,这里可以添加ROS国内源,详见:http://blog.exbot.net/archives/2001
4. 困扰了一天,创建urdf文件并使用rivz可视化时总是”robot_state_publisher崩溃”,如图:

终于在这里解决啦:https://answers.cosrobotics.org/question/984/robot_state_publisherbeng-kui/?comment=988















06-14
 1899
1899
1899
07-08
1415
1415
01-10
855
855
05-08
2623
2623
07-06
515
515

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









