







目录
二次规划(QP)
优化在很多领域都发挥着重要应用,其中自动驾驶的运动规划可以看做一个优化问题,根据实际情况进行合理简化和建模。
一个优化问题包含:优化目标和约束条件(包含等式约束、不等式约束)。
常见的凸优化问题的标准形式如下:
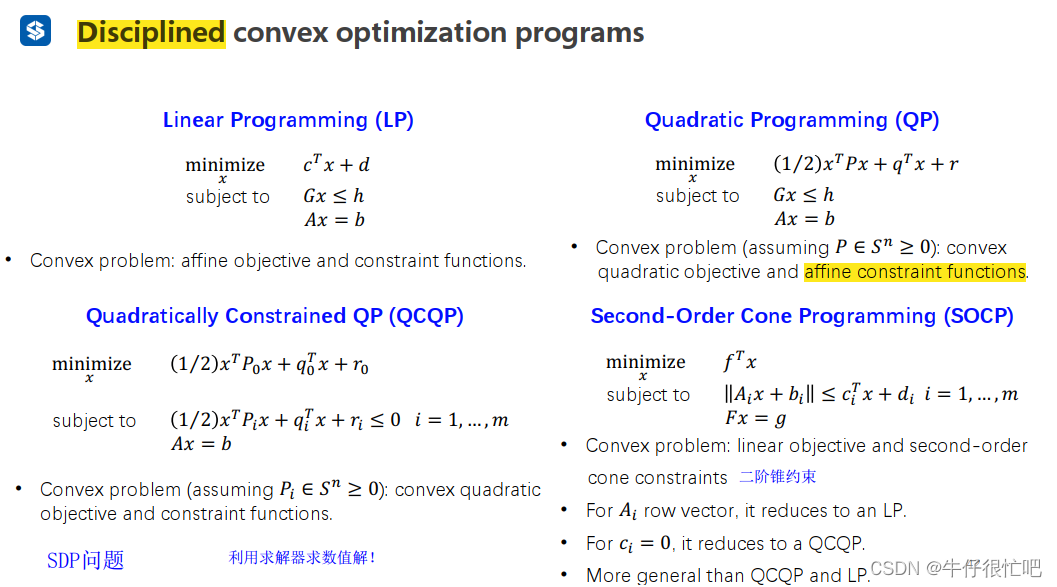
如果约束条件或目标函数包含非线性,则为非线性优化。二次规划是一种特殊的非线性规划,也是标准的凸优化问题,能够快速求解。
在路径/轨迹优化中经常建模为二次优化问题进行求解,很多MPC的求解过程也是转化为序列二次规划进行求解。
二次优化的标准形式为:
关于二次项系数的正定性,以及优化理论的剖析,此处暂不做探讨,可以阅读参考文献,待了解更加深入后再进行补充。
OSQP 求解器
c接口,采用csc矩阵
按列压缩CSC—Compressed sparse column
顾名思义将每一列出现的非零元素的个数统计后放好
#include "osqp.h"
int main(int argc, char **argv) {
// Load problem data
c_float P_x[3] = { 4.0, 1.0, 2.0, };
c_int P_nnz = 3;
c_int P_i[3] = { 0, 0, 1, };
c_int P_p[3] = { 0, 1, 3, };
c_float q[2] = { 1.0, 1.0, };
c_float A_x[4] = { 1.0, 1.0, 1.0, 1.0, }; //A的数据,第1列(0,1行)对应的非零元素为1.0,1.0,第2列(0,2行)对应的非零元素为1.0,1.0。
c_int A_nnz = 4; // 非零元素总数为4
c_int A_i[4] = { 0, 1, 0, 2, }; // 第1列对应的非零元素在0,1行,第2列对应的非零元素在0,2行
c_int A_p[3] = { 0, 2, 4, }; // 第i列的非零元素个数为A_p[i+1]-A_p[i], 如第0列非零元素个数为:2-0, 第1列非零元素个数为:4-2
c_float l[3] = { 1.0, 0.0, 0.0, };
c_float u[3] = { 1.0, 0.7, 0.7, };
c_int n = 2;
c_int m = 3;
// Exitflag
c_int exitflag = 0;
// Workspace structures
OSQPWorkspace *work;
OSQPSettings *settings = (OSQPSettings *)c_malloc(sizeof(OSQPSettings));
OSQPData *data = (OSQPData *)c_malloc(sizeof(OSQPData));
// Populate data
if (data) {
data->n = n;
data->m = m;
data->P = csc_matrix(data->n, data->n, P_nnz, P_x, P_i, P_p);
data->q = q;
data->A = csc_matrix(data->m, data->n, A_nnz, A_x, A_i, A_p);
data->l = l;
data->u = u;
}
// Define solver settings as default
if (settings) osqp_set_default_settings(settings);
// Setup workspace
exitflag = osqp_setup(&work, data, settings);
// Solve Problem
osqp_solve(work);
// Clean workspace
osqp_cleanup(work);
if (data) {
if (data->A) c_free(data->A);
if (data->P) c_free(data->P);
c_free(data);
}
if (settings) c_free(settings);
return exitflag;
}在OSQP中, 对上述所数据用结构体OSQPData进行封装, 其定义如下. 其中 和
都以稀疏矩阵CSC的形式进行存储.
// the location of file: /usr/local/include/osqp/types.h
typedef struct {
c_int n; ///< number of variables n
c_int m; ///< number of constraints m
csc *P; ///< the upper triangular part of the quadratic cost matrix P
csc *A; ///< linear constraints matrix A in csc format (size m x n)
c_float *q; ///< dense array for linear part of cost function (size n)
c_float *l; ///< dense array for lower bound (size m)
c_float *u; ///< dense array for upper bound (size m)
} OSQPData;CMakeList.txt
cmake_minimum_required(VERSION 3.10)
# set the project name
project(OSQP)
# add the executable
add_executable(OSQP osqp_example.c)
# Find OSQP library and headers
find_package(osqp REQUIRED)
# Link the OSQP shared library
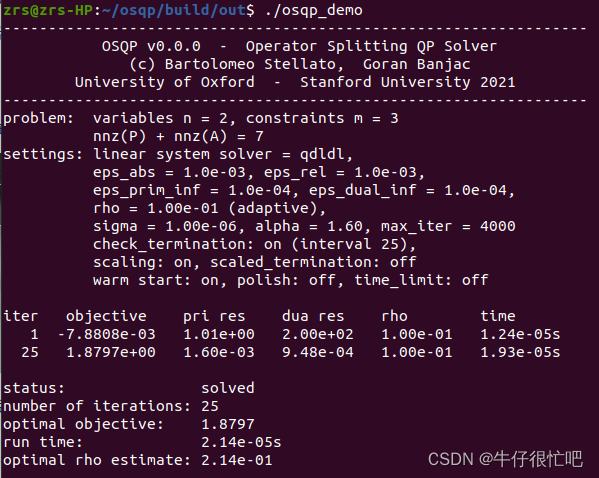
target_link_libraries(OSQP PRIVATE osqp::osqp)运行结果如下:
OSQP-eigen接口
除此之外,有两个推荐的第三方维护的接口:google的osqp-cpp与Giulio Romualdi的osqp-eigen.
以osqp-eigen为例(通常有固定的代码书写流程)
以下列问题的求解为例:
// osqp-eigen
#include "OsqpEigen/OsqpEigen.h"
// eigen
#include <Eigen/Dense>
#include <iostream>
int main()
{
// allocate QP problem matrices and vectores
Eigen::SparseMatrix<double> hessian(2, 2); //P: n*n正定矩阵,必须为稀疏矩阵SparseMatrix
Eigen::VectorXd gradient(2); //Q: n*1向量
Eigen::SparseMatrix<double> linearMatrix(2, 2); //A: m*n矩阵,必须为稀疏矩阵SparseMatrix
Eigen::VectorXd lowerBound(2); //L: m*1下限向量
Eigen::VectorXd upperBound(2); //U: m*1上限向量
hessian.insert(0, 0) = 2.0; //注意稀疏矩阵的初始化方式,无法使用<<初始化
hessian.insert(1, 1) = 2.0;
// std::cout << "hessian:" << std::endl
// << hessian << std::endl;
gradient << -2, -2;
linearMatrix.insert(0, 0) = 1.0; //注意稀疏矩阵的初始化方式,无法使用<<初始化
linearMatrix.insert(1, 1) = 1.0;
// std::cout << "linearMatrix:" << std::endl
// << linearMatrix << std::endl;
lowerBound << 1, 1;
upperBound << 1.5, 1.5;
// instantiate the solver
OsqpEigen::Solver solver;
// settings
solver.settings()->setVerbosity(false);
solver.settings()->setWarmStart(true);
// set the initial data of the QP solver
solver.data()->setNumberOfVariables(2); //变量数n
solver.data()->setNumberOfConstraints(2); //约束数m
if (!solver.data()->setHessianMatrix(hessian))
return 1;
if (!solver.data()->setGradient(gradient))
return 1;
if (!solver.data()->setLinearConstraintsMatrix(linearMatrix))
return 1;
if (!solver.data()->setLowerBound(lowerBound))
return 1;
if (!solver.data()->setUpperBound(upperBound))
return 1;
// instantiate the solver
if (!solver.initSolver())
return 1;
Eigen::VectorXd QPSolution;
// solve the QP problem
if (!solver.solve())
{
return 1;
}
QPSolution = solver.getSolution();
std::cout << "QPSolution" << std::endl
<< QPSolution << std::endl; //输出为m*1的向量
return 0;
}CMakeList文件内容:
cmake_minimum_required(VERSION 3.1)
set(CMAKE_CXX_STANDARD 11)
set(CMAKE_CXX_STANDARD_REQUIRED ON)
project(OSQP_test LANGUAGES CXX)
find_package(OsqpEigen)
find_package(Eigen3)
include_directories(SYSTEM ${EIGEN3_INCLUDE_DIR})
#MPCExample
add_executable(OSQP_test main.cpp)
target_link_libraries(OSQP_test OsqpEigen::OsqpEigen)这篇文章只是简单介绍了二次规划的思想和OSQP的代码流程,希望后面能结合实际的路径/轨迹优化问题,进行实践验证。
参考链接:
使用OSQP解决二次凸优化(QP)问题_首飞爱玩机器人的博客-CSDN博客_osqp库
Apollo MPC OSQP Solver_cyytum的博客-CSDN博客_mpc osqp求解器
OSQP solver documentation — OSQP documentation
凸优化笔记(3)Quadratic Programming简介 - 知乎


















 1356
1356

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











