






智能车辆路径跟踪控制:纯跟踪控制与Stanley控制算法,其他线相关算法。
主要是MATLAB程序,可以根据需要的路径进行跟踪
ID:6920649147612984
霸天虎1999
智能车辆路径跟踪控制一直是自动驾驶领域中的重要研究方向之一,它是实现自主导航的关键技术之一。在智能车辆路径跟踪控制中,纯跟踪控制与Stanley控制算法以及其他线相关算法都具有重要的研究和应用价值。本文将围绕这些算法展开,探讨它们在智能车辆路径跟踪控制中的原理、优势和应用。
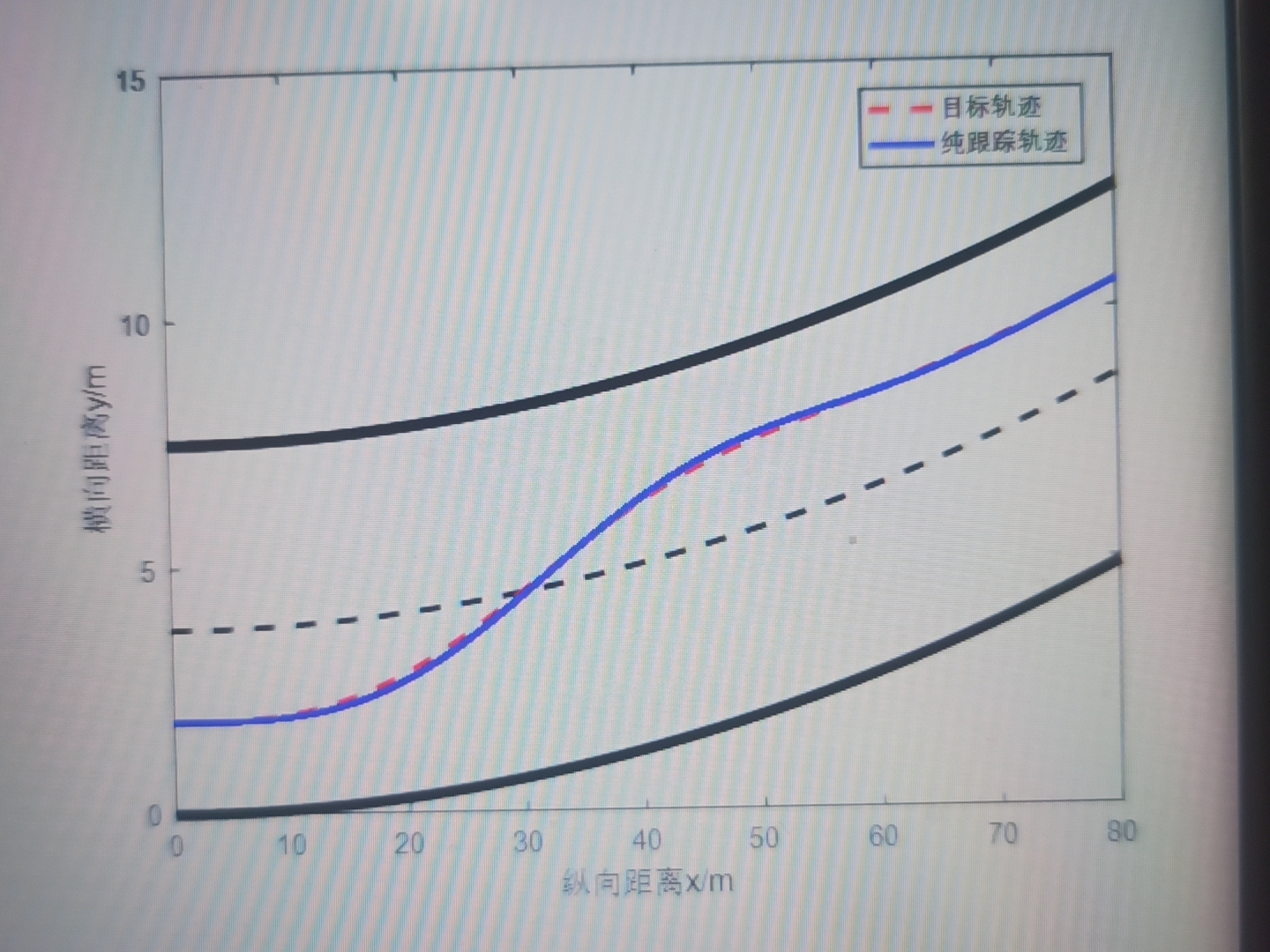
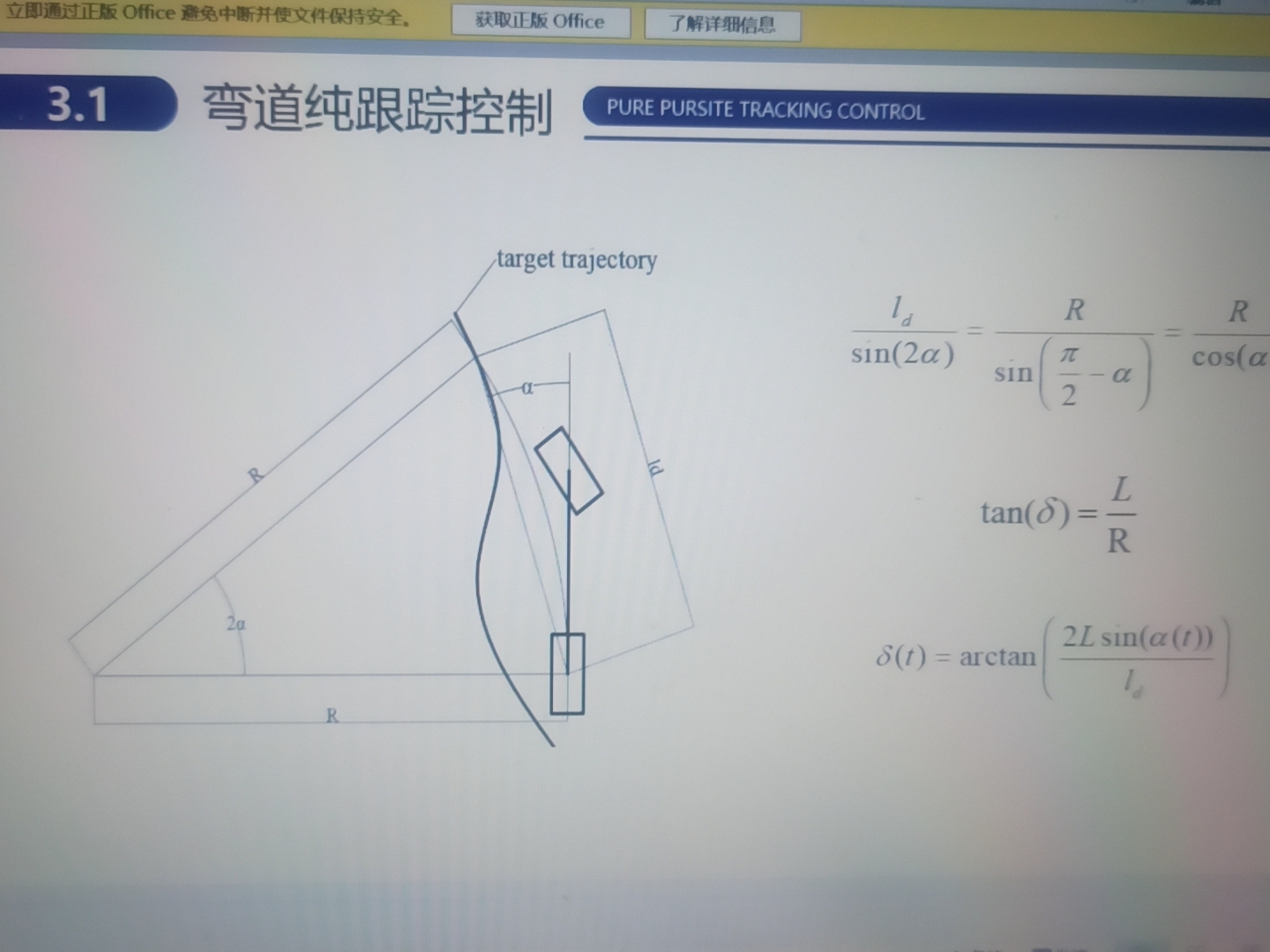
首先,纯跟踪控制算法是一种基本的路径跟踪方法。它通过对车辆行驶方向的控制,使得车辆在给定路径上保持一定的车头朝向,并随着路径的变化进行调整。这种算法主要基于车辆的运动学模型,通过计算车辆的转向角度来实现车辆的路径跟踪。在MATLAB中,我们可以根据需要的路径进行跟踪,通过调整车辆的转向角度来实现路径跟踪的目标。纯跟踪控制算法具有简单、易于实现的特点,并且可以适应各种不同的路径形状和车辆运动状态。
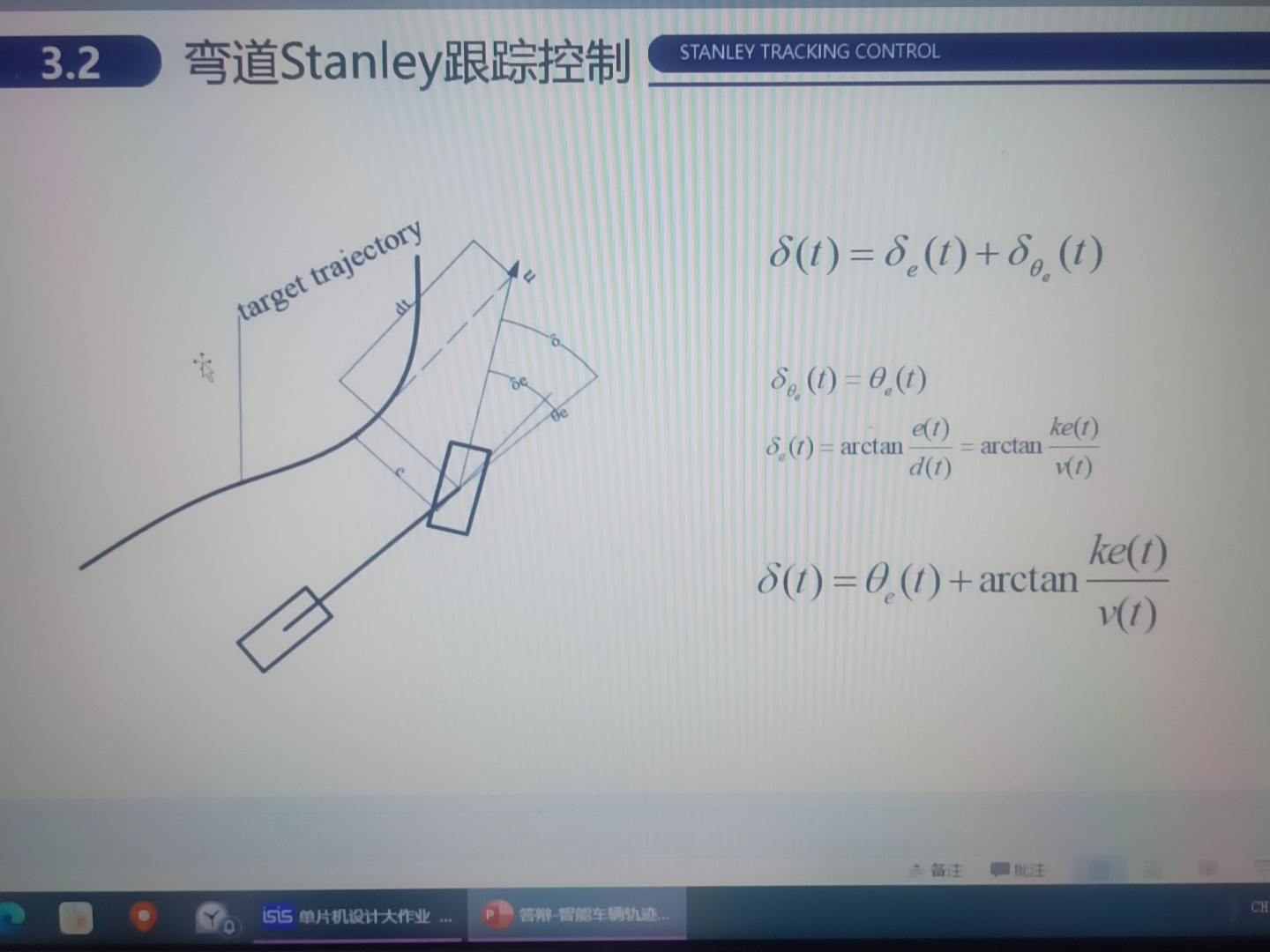
除了纯跟踪控制算法,Stanley控制算法也是智能车辆路径跟踪控制中常用的方法之一。Stanley控制算法是一种基于车辆动力学模型和误差修正的算法,它通过对车辆转向角度的调整来实现路径跟踪。相比于纯跟踪控制算法,Stanley控制算法通过考虑车辆的动力学特性和路面摩擦系数等因素,能够更加精确地控制车辆的转向行为,提高路径跟踪的精度和稳定性。在MATLAB中,我们可以使用Stanley控制算法来实现智能车辆的路径跟踪,并根据实际需要调整算法参数来优化路径跟踪效果。
此外,除了纯跟踪控制和Stanley控制算法,还存在其他一些与路径跟踪相关的算法。例如,线相关算法是一种基于线特征的路径跟踪方法,它通过检测和识别道路上的线特征,来实现路径的检测和跟踪。在MATLAB中,我们可以利用图像处理和计算机视觉的技术,结合线相关算法来实现智能车辆的路径跟踪。线相关算法能够有效地识别和跟踪道路上的线特征,对于车辆在复杂道路环境下的路径跟踪具有重要的意义。
总之,智能车辆路径跟踪控制是自动驾驶领域中的重要研究方向,纯跟踪控制与Stanley控制算法以及其他线相关算法都是路径跟踪中常用的方法。这些算法在MATLAB中的应用,能够实现智能车辆对指定路径的跟踪,并且能够根据需要进行参数调整和优化。通过研究和应用这些算法,可以提高智能车辆的自主导航能力,为自动驾驶技术的发展做出贡献。希望本文对读者在智能车辆路径跟踪控制领域的研究和实践提供一定的参考和帮助。
相关的代码,程序地址如下:http://coupd.cn/649147612984.html
















 443
443

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









