






四足机器人MPC+WBC方案
一、MPC:
系统方程:
状态变量:\(x_r = (h_{com}, q_b, q_j) \in R^{24}\), 包含6维质心点动量,6维机身位姿,3*4个关节角度
输入变量:\(u = (f_{c1}, ......, f_{c4}, v_j) \in R^{3*4+12}\), 包含4个腿末端的3维力,12个关节速度
动力学: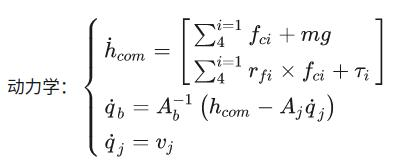
其中\(f_{ci}\)是4足末端的接触力,\(r_{fi}\)是足触地相对于质心的位置矢量, \(h_{com}\)是质心动量,A是质心动力学的刚体惯性矩阵
动量=mv;所以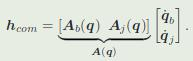
动量求导后,变成ma,就是力。
cost function:
- 机体跟随误差(姿态,位置,角速度,速度)
- 足轨迹跟随误差(关节角,关节角速度,接触脚在世界坐标系下的位置和速度,接触力)
- 关节速度和接触力中的高频内容惩罚
- relaxed barrier functions 不等式约束
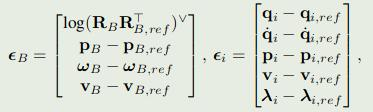
机体误差和足迹轨迹误差:
relaxed barrier functions 不等式约束:
-
relaxed barrier functions:

-
全惩罚项:

-
关节角、角速度、关节力矩上下限:
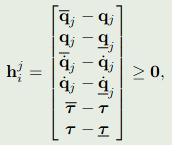
-
落足区域:

-
摩擦锥约束:

-
障碍物约束:

等式约束:
- \(f_{ci} = 0\) 摆动腿的接触力为0
- \(v_{ci} = 0\) 支撑腿的接触速度为0
- \(v_{ci}n_z = v^{*}_z\) 对于摆动相,参考轨迹仅在地表法线方向约束(这样即保证了足部以指定的速度抬离并离地,同时又在切线方向有足够的灵活度)















 217
217

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









