






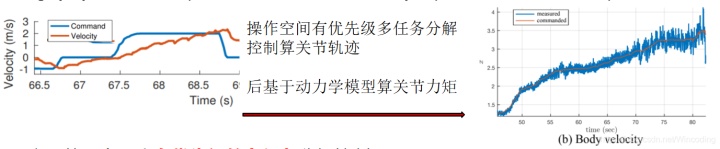
2019年,MIT在Mini Cheetah上采用了MPC+WBC的控制方案,论文《Highly Dynamic Quadruped Locomotion via whole-body impulse control and model predictive control》中称加入WBC后Mini的最高运动速度由18年只采用MPC时的2.45m/s增加到19年的3.7m/s。
笔者这几天看了下Mini上的WBC,在此处谈谈自己一些粗浅的理解,如有错误,请各位指正。
mini上所用的MPC与Cheetah 3上的相同,笔者在上一篇博文https://mp.csdn.net/console/editor/html/108088051中也谈了下自己对Cheetah 3上的凸模型预测控制的理解。在cheetah 3中,MPC优化出的地面反作用力取负号后左乘雅可比转置得到关节力矩,笔者的理解是此处的关节力矩的计算更多的是反映了静力学层面的关系,其间并没有考虑关节速度、加速度等对关节力矩的影响,即没有考虑动力学。而mini上的WBC恰好是在MPC计算得到地面反作用力的基础上利用动力学模型得到关节的位置、速度、加速度以及力矩这些量,实现更精准的控制。因为机器人是在不断运动的,因此mini所用的是机器人浮动基动力学模型,即机器人的基座是运动的,求解难度是大于基座固定不动的工业机器人的。浮动基动力学方程表达形式如下:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章















 7202
7202











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









