







实现目标:利用程序发布速度指令,让小海龟动起来
前提时已经创建了工作空间和功能包https://blog.csdn.net/qinqinxiansheng/article/details/106768491
1.创建功能包
在终端进入src文件内,创建learning_topic文件
cd catkin_ws_1/src
catkin_create_pkg learning_topic rospy roscpp std_msgs geometry_msgs turtlesim
2.编写程序
在learning_topic下的src文件夹下新建.cpp文件,需要在此learning_topic/src文件夹下运行:
touch velocity_publisher.cpp
编写程序:
//发布turtle1/cmd_vel话题,消息类型为geometry_msgs::Twist
#include <ros/ros.h>
#include <geometry_msgs/Twist.h>
int main(int argc,char **argv)
{
//初始化节点
ros::init(argc,argv,"velocity_publisher");
//创建句柄
ros::NodeHandle n;
//创建一个Publisher,发布/turtle1/cmd_vel的tpoic
ros::Publisher turtle_vel_pub = n.advertise<geometry_msgs::Twist>("/turtle1/cmd_vel",10);
//循环频率
ros::Rate loop_rate(10);
int count =0;
while (ros::ok())
{
//初始化消息
geometry_msgs::Twist vel_msg;
vel_msg.linear.x=0.5;
vel_msg.angular.z=0.2;
//发布消息
turtle_vel_pub.publish(vel_msg);
ROS_INFO("Publish turtle velocity command[%0.2f m/s,%0.2f rad/s]",vel_msg.linear.x,vel_msg.angular.z);
//设置循环频率
loop_rate.sleep();
}
return 0;
}
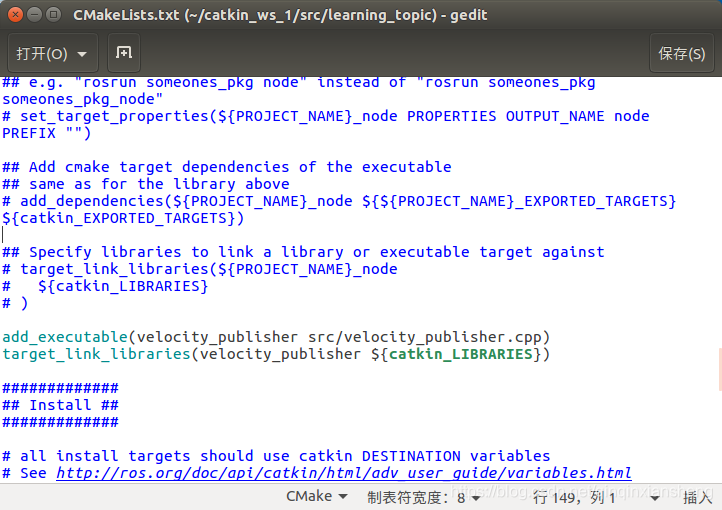
配置CMakeList.txt文件
打开learning_topic下的CMakeList.txt,添加
add_executable(velocity_publisher src/velocity_publisher.cpp)
target_link_libraries(velocity_publisher ${catkin_LIBRARIES})
3.编译:
进入根目录,即catkin_ws_1下,打开终端
catkin_make
4.测试:
运行ROS master,在第一个终端中运行:
roscore
打开海龟仿真器,在第二个终端中运行:
rosrun turtlesim turtlesim_node
在根目录下打开第三个终端,运行所编写的程序
source devel/setup.bash
rosrun learning_topic velocity_publisher
此时海龟就会自己沿着圆周运动了

本系列博文局参考古月居的ROS入门21讲














 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









