







 超级会员免费看
超级会员免费看
项目演示:无人车路径规划算法:基于Frenet参照系的无人车路径规划算法_哔哩哔哩_bilibili
本博客付·完整代码数据:
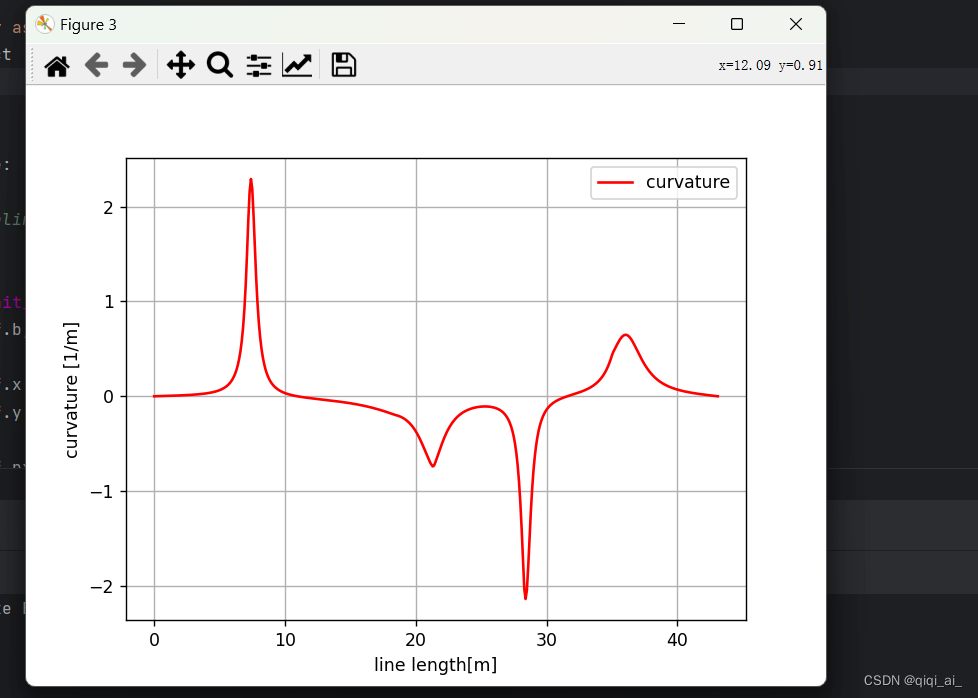
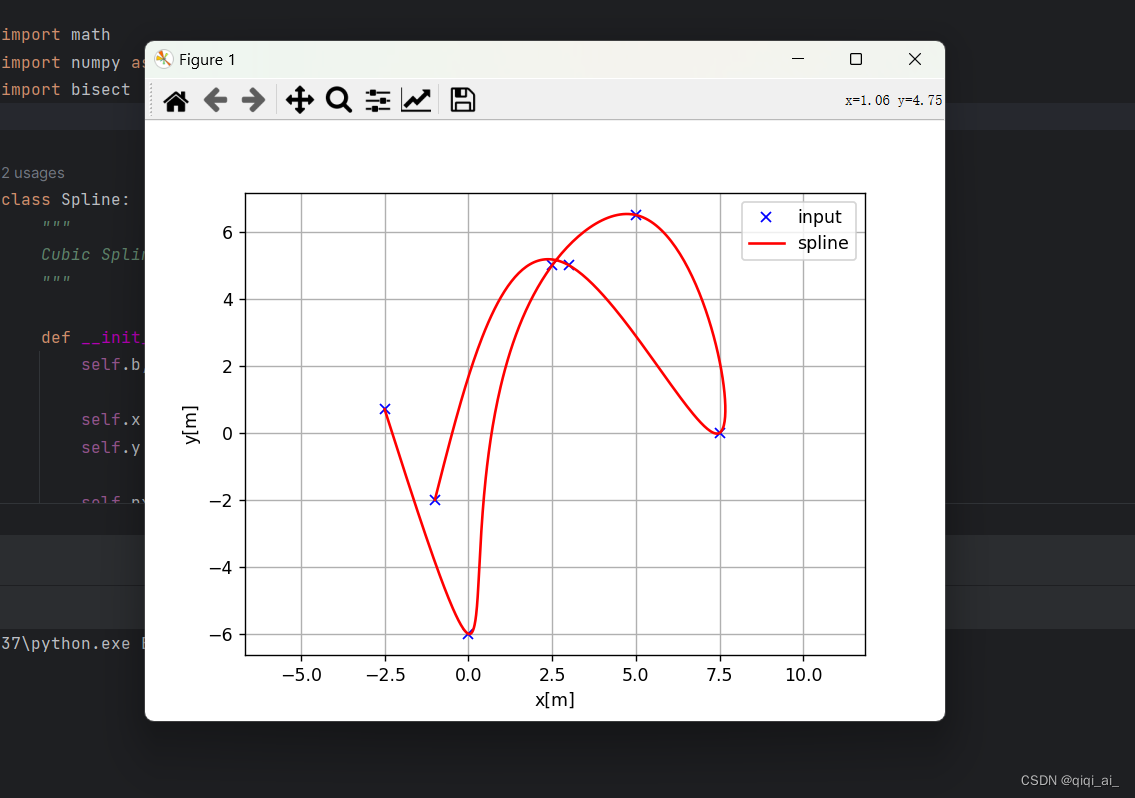
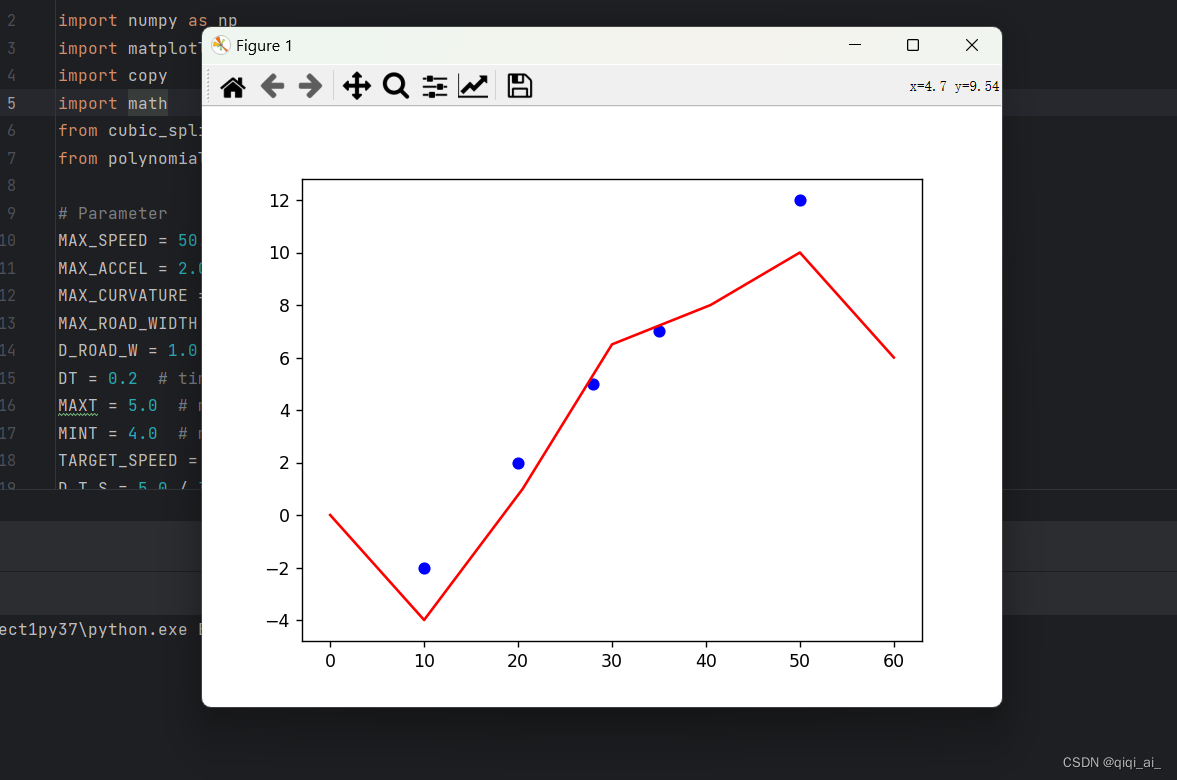
运行截图:
import numpy as np
import matplotlib.pyplot as plt
import copy
import math
from cubic_spline import Spline2D
from polynomials import QuarticPolynomial, QuinticPolynomial
# Parameter
MAX_SPEED = 50.0 / 3.6 # maximum speed [m/s]
MAX_ACCEL = 2.0 # maximum acceleration [m/ss]
MAX_CURVATURE = 1.0 # maximum curvature [1/m]
MAX_ROAD_WIDTH = 7.0
 订阅专栏 解锁全文
订阅专栏 解锁全文

















 2万+
2万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











