







所谓开源飞控就是建立在开源思想基础上的飞行自主控制器项目(Open Source AutoPilot),同时包含开源软件和开源硬件,而软件则包含飞控硬件中的固件和地面站软件。
一 开源飞控发展
第一代开源飞控系统使用Arduino或其他类似开源电子平台为基础,扩展连接各种MEMS传感器,能够让无人机能平稳地飞起来。
主要特点是模块化和可扩展能力。

第二代开源飞控系统大多拥有自己的开源硬件、开发环境和社区,采用全集成的硬件架构。
主要特点是高度集成、高可靠,其功能已经接近商业自动驾驶仪

第三代开源飞控系统将会在软件、人工智能以及云应用方面进行革新。加入集群飞行、图像识别、自主避障、自动跟踪飞行等高级飞行功能,向机器视觉、集群化、开发过程平台化的方向发展。

二开源飞控介绍
Arduino飞控

APM飞控

PX4和PIXHAWK

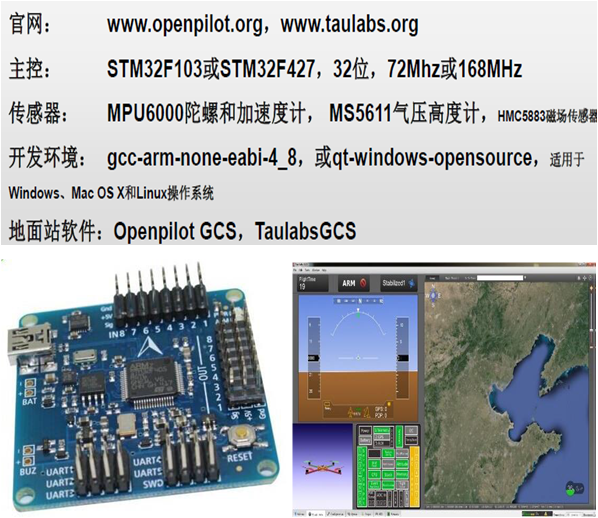
Openpilot和Taulabs
Multiwiicopter

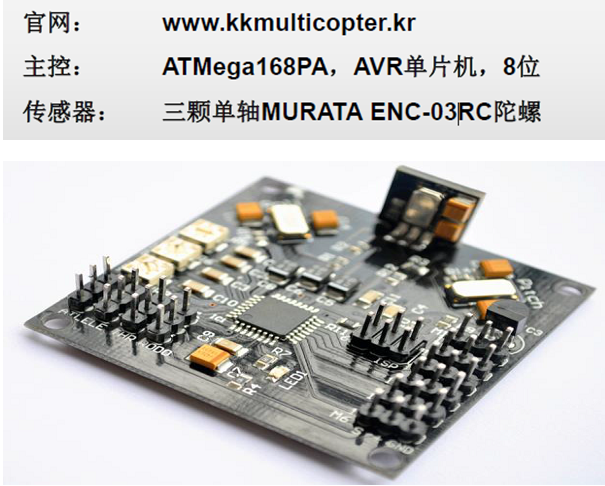
KK飞控
Paparazzi

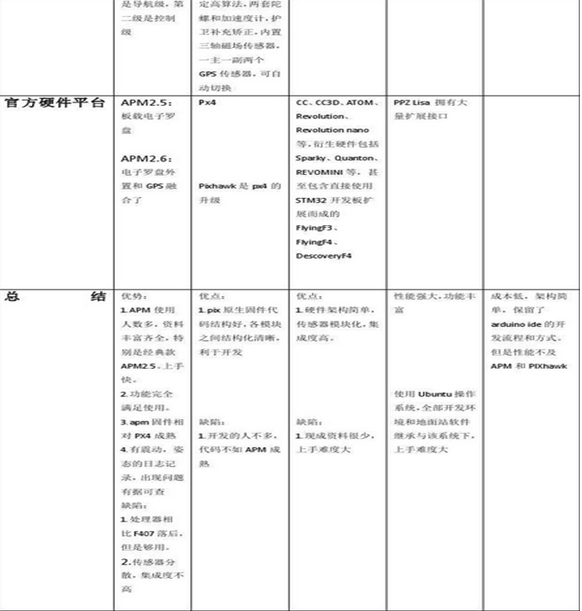
三 主要平台对比


















 7673
7673

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









