







第三章 转速闭环控制的直流调速系统
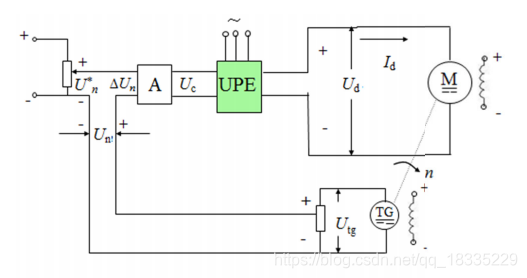
1.带转速负反馈的闭环直流调速系统原理框图
此系统静特性方程为:
其中,K为闭环系统的开环放大系数,
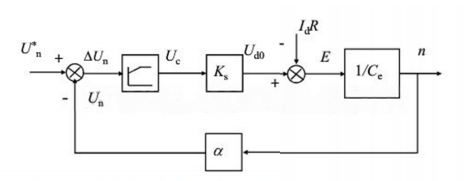
2.转速负反馈闭环直流调速系统稳态结构框图
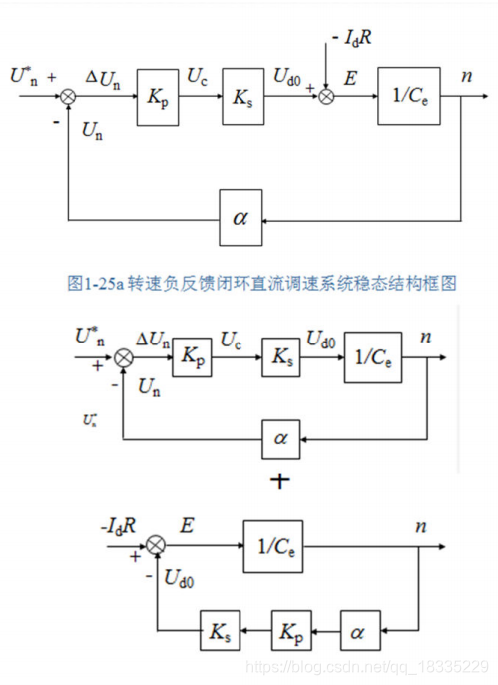
开环系统和闭环系统的转速降落关系:
开环系统和闭环系统静差率关系:
开环系统和闭环系统调速范围关系:
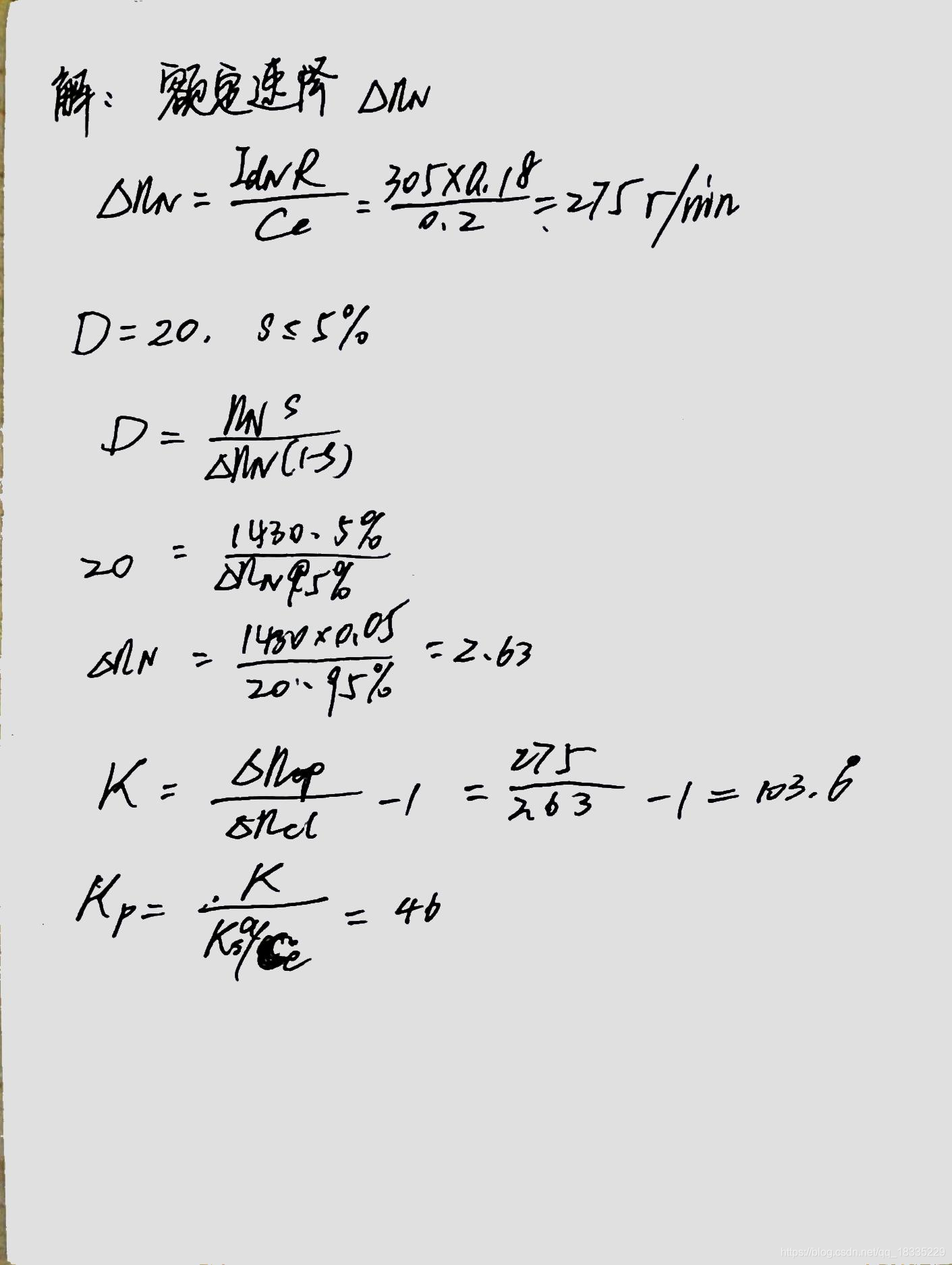
例题1:电机(第二章例中已求得开环速降△n=275,额定转速1430)要求D=20,s≤5%,已知Ks=30,a=0.015,Ce=0.2,采用比例控制闭环调速系统满足上述要求时,比例放大系数是多少?
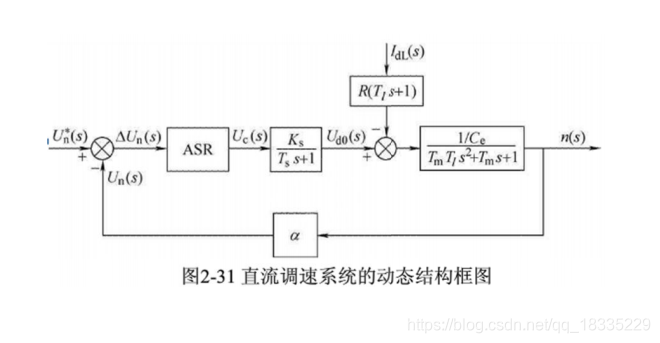
3.直流电动机调速系统动态结构框图
直流调速系统中,稳定性与稳态误差之间是矛盾的,稳态误差小,稳定性必然差;稳态误差大,则稳定性好。
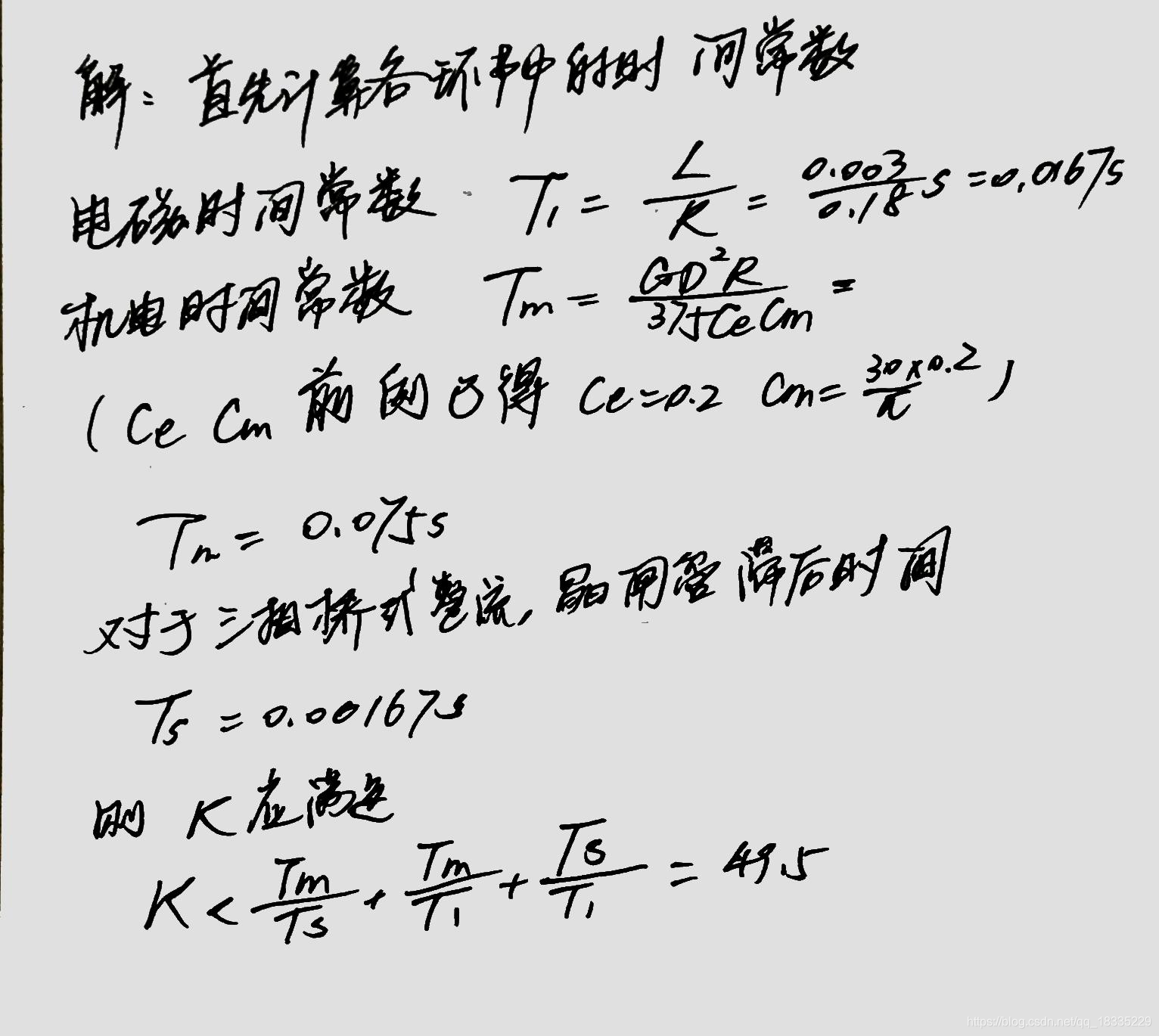
4.机电时间常数
例题2:某三相桥式整流可控电路,已知电枢回路总电阻R=0.18,电感L=3mH,系统运动部分的飞轮惯量GD2=60,试判别系统稳定性。
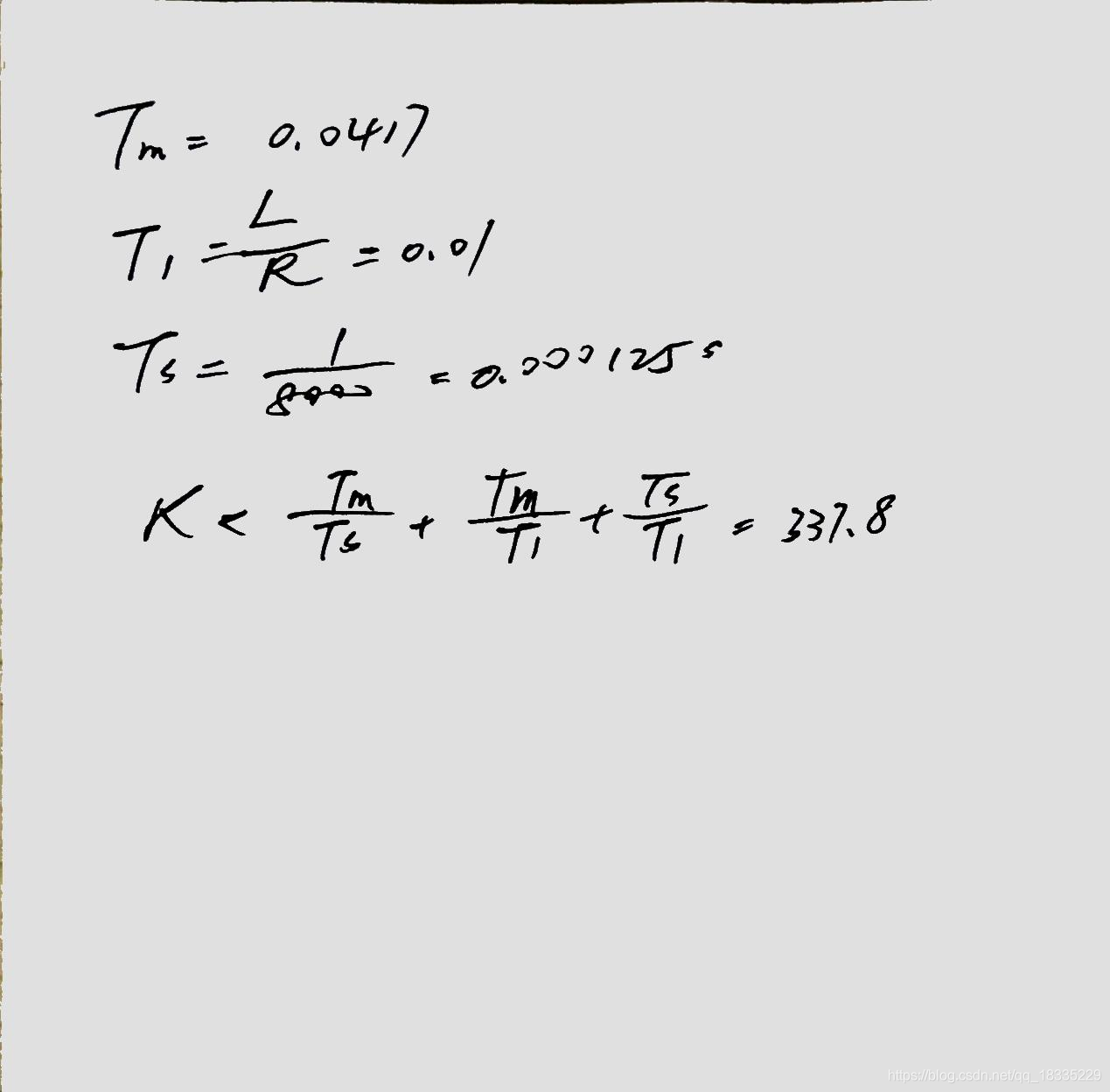
例3:若改用全控器件PWM系统,电枢回路参数为:R=0.1,L=1mH,Ks=44,PWM开关频率为8KHZ,按同样性能指标,开环放大系数是多少?
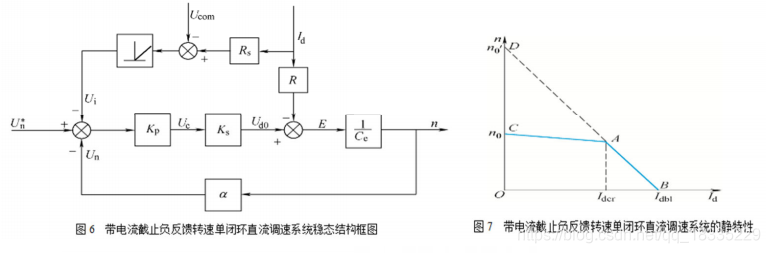
5.带电流截止负反馈转速单闭环直流调速系统稳态结构图与静特性
6.无静差直流调速系统稳态结构框图
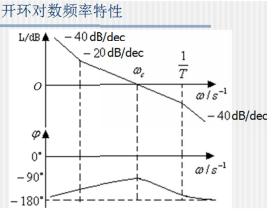
7.典II系统开环传递函数:对数频率特性:

















 6608
6608

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









