







 本文介绍了ORB-SLAM2中相机模型的基础理论,包括像素坐标与像平面坐标系的关系、相机坐标系与世界坐标系的关系,以及成像投影过程。重点阐述了本征矩阵E的计算及其在恢复旋转矩阵R和平移矩阵T中的作用,探讨了尺度scale对结构恢复的影响,并提及了单应矩阵在SLAM中的应用。
本文介绍了ORB-SLAM2中相机模型的基础理论,包括像素坐标与像平面坐标系的关系、相机坐标系与世界坐标系的关系,以及成像投影过程。重点阐述了本征矩阵E的计算及其在恢复旋转矩阵R和平移矩阵T中的作用,探讨了尺度scale对结构恢复的影响,并提及了单应矩阵在SLAM中的应用。
本篇博客借鉴了许多经典博客的理论。
orbslam2相机pose估计和map point结构恢复
orbslam2的相机初始估计有两种方法:本证矩阵E和单应矩阵两种方法,具体可以看我之前的博客oerslam2-初始化
(1)再讲相机pose估计之前,我要讲一下相机的数学模型和对极几何。
1、像素坐标与像平面坐标系之间的关系

得出这个公式后我们可以运用线性代数的知识把方程用矩阵形式表示:

当然我们也可以用另一种矩阵形式表示:

2、相机坐标系与世界坐标系之间的关系

3、成像投影关系(相机坐标系与像平面坐标系)

同样我们用矩阵形式表示:

4、得到公式
而我们可以将以上公式综合一下就可以得到:

(2)现在要讲一下对极几何的知识!
两个摄像机的光心 C0、C1 ,三维空间中一点 P ,在两幅图像中的位置为 p0、p1 。如下图所示:
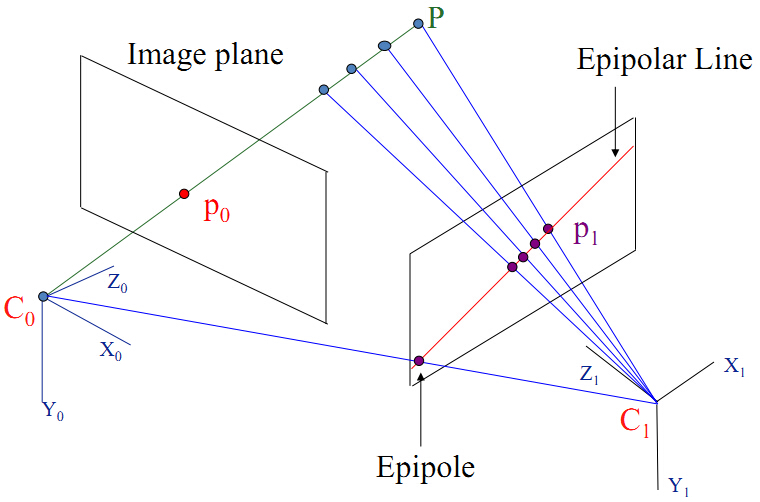
由于 C0、C
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 6304
6304

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









